You might also like
- Yamamoto Geoestatistica AplicadaDocument84 pagesYamamoto Geoestatistica AplicadaBarbara Moutinho50% (2)
- 8 Ano Geometria Retas Paralelas e TransversaisDocument5 pages8 Ano Geometria Retas Paralelas e TransversaisLe SilvaNo ratings yet
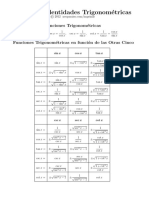
- Tabla de Identidades TrigonometricasDocument4 pagesTabla de Identidades TrigonometricasLiis RiincónNo ratings yet
- AP3 - MD - 2019.1-GabaritoDocument8 pagesAP3 - MD - 2019.1-GabaritoTony MendesNo ratings yet
- Lista 3 CalculoDocument2 pagesLista 3 CalculoHellen SilvaNo ratings yet
- Apostila Excel 2007Document59 pagesApostila Excel 2007Juliana Cardoso100% (1)
- Lista 1 CombinatóriaDocument2 pagesLista 1 Combinatóriavaldeir_cuitéNo ratings yet
- 02 A-Aula 18.1 Estudo Do PontoDocument33 pages02 A-Aula 18.1 Estudo Do PontoLaiana TrindadeNo ratings yet
- A Matemática Ensinada Na Escola e Aprendida No CotidianoDocument4 pagesA Matemática Ensinada Na Escola e Aprendida No CotidianoDavid Capistrano NetoNo ratings yet
- Exercicio Resolvidos InformaticaDocument39 pagesExercicio Resolvidos InformaticaVíctor André MacandzaNo ratings yet
- Revista CBC 2023 1Document11 pagesRevista CBC 2023 1Fernando SouzaNo ratings yet
- 5199Document106 pages5199Cidda SouzaNo ratings yet
- Operações Com Números Decimais Prof João CarlosDocument8 pagesOperações Com Números Decimais Prof João CarlosJoão Carlos Lopes Cardoso100% (1)
- Logaritmos Parte2-2012Document51 pagesLogaritmos Parte2-2012Telma Castro Silva100% (2)
- Listas Calculo Diferencial UFRGSDocument53 pagesListas Calculo Diferencial UFRGSJoão SilvaNo ratings yet
- A Historia e Evolução Dos ComputadoresDocument4 pagesA Historia e Evolução Dos ComputadoresCharles BeatzNo ratings yet
- Telecurso 2000 - Matemática 26Document7 pagesTelecurso 2000 - Matemática 26Matematica TCNo ratings yet
- Uma Disciplina Uma Historia (Google Academico Dia 10 de 03 de 2020)Document196 pagesUma Disciplina Uma Historia (Google Academico Dia 10 de 03 de 2020)manoel cristiano marreiro sampaioNo ratings yet
- Calcule o Valor de X para Os Triângulos AbaixoDocument2 pagesCalcule o Valor de X para Os Triângulos AbaixoLilian PedroNo ratings yet
- Teoria Da Relatividade RestritaDocument62 pagesTeoria Da Relatividade RestritaMarvyn IngaNo ratings yet
- TitulaçãoDocument7 pagesTitulaçãoArnaldo JaborNo ratings yet
- 2-Lei de Gauss PDFDocument13 pages2-Lei de Gauss PDFAlex SilvaNo ratings yet
- Aula 1Document7 pagesAula 1Esdin Horácio LuísNo ratings yet
- Agrupamento de Escolas de Diogo Cão, Vila Real: 2021/2022 Ficha de Trabalho 3 NovembroDocument3 pagesAgrupamento de Escolas de Diogo Cão, Vila Real: 2021/2022 Ficha de Trabalho 3 NovembroIolanda SantosNo ratings yet
- Regra Dos BanqueirosDocument2 pagesRegra Dos BanqueirosHitakiNo ratings yet
- Exercícios:: MatemáticaDocument22 pagesExercícios:: MatemáticaEdmilla MarquezNo ratings yet
- PlanoDeAula 5Document3 pagesPlanoDeAula 5Info FreimamNo ratings yet
- TVM ConsequenciasDocument5 pagesTVM ConsequenciasArthur DaherNo ratings yet
- Fundamentos Da Matemática AP Parte 1Document31 pagesFundamentos Da Matemática AP Parte 1RodrigoNuriNo ratings yet
- Lista de Exercicios Matrizes e DeterminantesDocument9 pagesLista de Exercicios Matrizes e DeterminantesLuiz Marcel L NunesNo ratings yet