You might also like
- Cab&Chaissis ElectricalDocument323 pagesCab&Chaissis Electricaltipo3331100% (13)
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- Dell Compellent Sc4020 Deploy GuideDocument184 pagesDell Compellent Sc4020 Deploy Guidetar_py100% (1)
- P345 CortecDocument7 pagesP345 CortecHari Krishna.MNo ratings yet
- DBR Elec CCPPDocument29 pagesDBR Elec CCPPParmeshwar Nath TripathiNo ratings yet
- ADR241CDocument11 pagesADR241CNamrata ShettiNo ratings yet
- CORONA With Peek S Law PDFDocument127 pagesCORONA With Peek S Law PDFEmilio ClavelNo ratings yet
- 1MRB520006-BEN en XS92b Computer-Based 3-Phase Test SetDocument14 pages1MRB520006-BEN en XS92b Computer-Based 3-Phase Test SetFredrikNo ratings yet
- CS709 HandoutsDocument117 pagesCS709 HandoutsalexNo ratings yet
- Financial Analysis of Wipro LTDDocument101 pagesFinancial Analysis of Wipro LTDashwinchaudhary89% (18)
- Directional Overcurrent and Earth-Fault Protections For A Biomass Microgrid System in MalaysiaDocument11 pagesDirectional Overcurrent and Earth-Fault Protections For A Biomass Microgrid System in MalaysiajoeNo ratings yet
- Commissioning of DAVRDocument70 pagesCommissioning of DAVRPMG Bhuswal Project100% (1)
- A I A I A - Find The Phasor Phase Currents I I: Problem # 1Document8 pagesA I A I A - Find The Phasor Phase Currents I I: Problem # 1MohammedNasserNo ratings yet
- 3.3kV Boards Motor Settings PDFDocument15 pages3.3kV Boards Motor Settings PDFEr Aniket HarekarNo ratings yet
- Jvs Manual JRD 011Document5 pagesJvs Manual JRD 011ashutosh20090% (1)
- 07a Backup OCEF Relay - Tech. Data Check List CompletedDocument6 pages07a Backup OCEF Relay - Tech. Data Check List CompletedAnupam0103No ratings yet
- 115kV - E02 - 60R - ROC Feerder 1 - RED670 Differential Relay - at Glow SideDocument10 pages115kV - E02 - 60R - ROC Feerder 1 - RED670 Differential Relay - at Glow SideYongchayut WiratchatiNo ratings yet
- Protection: Figure 4-27: Protection Display HierarchyDocument29 pagesProtection: Figure 4-27: Protection Display HierarchyFreddy Jonathan Condori TurpoNo ratings yet
- 7VK87Document5 pages7VK87Ganesh DuraisamyNo ratings yet
- REL 531-1-0 Line Distance Protection TerminalDocument20 pagesREL 531-1-0 Line Distance Protection Terminalsenthil kumarNo ratings yet
- VIP30 35 InfoDocument20 pagesVIP30 35 Infovdmerwd5527No ratings yet
- Vector Shift and ROCOF ADocument2 pagesVector Shift and ROCOF AmodantoNo ratings yet
- ASHIDA Numerical 3OC + EF Protection Relay Features 11 Protection FunctionsDocument17 pagesASHIDA Numerical 3OC + EF Protection Relay Features 11 Protection FunctionsVishwanath TodurkarNo ratings yet
- Power Systems Relays Relion 670Document43 pagesPower Systems Relays Relion 670kass_ecsNo ratings yet
- TransformerProtection 180306-201-244Document44 pagesTransformerProtection 180306-201-244Diana UlloaNo ratings yet
- P543&5 en TM M PDFDocument874 pagesP543&5 en TM M PDFNgoc NeoNo ratings yet
- 3 C&S - ALL Low Voltage Components - MCB - MCCB Etc 19.04Document78 pages3 C&S - ALL Low Voltage Components - MCB - MCCB Etc 19.04mksharma1978No ratings yet
- Nepal hydropower generator protection relay specificationsDocument5 pagesNepal hydropower generator protection relay specificationsPritam SinghNo ratings yet
- Alfanar Co.: Respon Sibilities Legend CSDDocument5 pagesAlfanar Co.: Respon Sibilities Legend CSDjayabalNo ratings yet
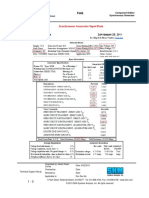
- Synchronous Generator Input DataDocument3 pagesSynchronous Generator Input DataSharat Chandra KeswarNo ratings yet
- 3 HVDC Converter Control PDFDocument78 pages3 HVDC Converter Control PDFJanaki BonigalaNo ratings yet
- Differential Bus ProtectionDocument14 pagesDifferential Bus ProtectionRodriguez Villalobos NelsonNo ratings yet
- JE-2004 Building Risk Assessment Lightning Protection DesignDocument3 pagesJE-2004 Building Risk Assessment Lightning Protection Designblack_3289No ratings yet
- REL512 Setting Example for Short Lines Protection SettingsDocument18 pagesREL512 Setting Example for Short Lines Protection Settingsjosleiny100% (1)
- Tata Power Generator Protection Relay Test ReportDocument69 pagesTata Power Generator Protection Relay Test ReportJayamkondanNo ratings yet
- 110kV 1250A isolator technical parametersDocument19 pages110kV 1250A isolator technical parametersneerajNo ratings yet
- 03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)Document12 pages03HYUNDAI Intelligent Preventative Diagnostic System (HiPDS)juliancansenNo ratings yet
- 7UM62 Installation Instr 02Document6 pages7UM62 Installation Instr 02Eduardo Garcia PNo ratings yet
- C&R Panel (Without Automation) - Aug, 2016Document73 pagesC&R Panel (Without Automation) - Aug, 2016apsNo ratings yet
- Technical Instruction ABB RED670Document10 pagesTechnical Instruction ABB RED670Iqball ArdiyanNo ratings yet
- R8563C Kitz 204Document64 pagesR8563C Kitz 204Rinda_Rayna100% (1)
- CAD Drafting RequirementDocument7 pagesCAD Drafting RequirementPramod B.WankhadeNo ratings yet
- Turbine Generator Protection SchemeDocument7 pagesTurbine Generator Protection SchemepmlikrishnaNo ratings yet
- EasyPact CVS Tripping Curves GuideDocument7 pagesEasyPact CVS Tripping Curves GuideKS CheeNo ratings yet
- Auto Transformer Protection SchemesDocument3 pagesAuto Transformer Protection SchemesArogya Raju PudhotaNo ratings yet
- Auto Recloser Is An Inbuilt Function of REC650 (Bay Control Unit)Document3 pagesAuto Recloser Is An Inbuilt Function of REC650 (Bay Control Unit)Avik BhattacharyaNo ratings yet
- Electrico PDFDocument60 pagesElectrico PDFJoel SimpsonNo ratings yet
- Earth Fault RelayDocument1 pageEarth Fault RelayAliu AlaoNo ratings yet
- IEEE STD C57.19.00-2004 (CN - EN)Document18 pagesIEEE STD C57.19.00-2004 (CN - EN)pdrich8No ratings yet
- CONTROL AND RELAY PANEL DIMENSIONSDocument8 pagesCONTROL AND RELAY PANEL DIMENSIONSGuru Mishra0% (1)
- What Is Charging Current in Transmission Line - Its Calculation and Significance - Circuit GlobeDocument2 pagesWhat Is Charging Current in Transmission Line - Its Calculation and Significance - Circuit GlobeMURALINo ratings yet
- SR61CDocument3 pagesSR61CSubramaniam NPNo ratings yet
- Circuit Breaker Timing Test ResultsDocument2 pagesCircuit Breaker Timing Test ResultsAhmed FathyNo ratings yet
- GE B90 PresentationDocument71 pagesGE B90 PresentationIsuru WijewardeneNo ratings yet
- Feeder Terminal Product Guide REF 542plusDocument28 pagesFeeder Terminal Product Guide REF 542plusRazvan MaresNo ratings yet
- Alfanar Co.: Respon Sibilities Legend CSDDocument4 pagesAlfanar Co.: Respon Sibilities Legend CSDjayabalNo ratings yet
- IRI PRO V3 CatalogueDocument14 pagesIRI PRO V3 CatalogueThomas Joseph100% (2)
- Arrester Protection DistanceDocument8 pagesArrester Protection DistanceyaoNo ratings yet
- Ground Fault LocationDocument8 pagesGround Fault Locationzbyszko201234No ratings yet
- Px40 Introduction SNDocument63 pagesPx40 Introduction SNRajasekar ThangarajNo ratings yet
- Introduction to Power System ProtectionDocument19 pagesIntroduction to Power System Protectionayan PatelNo ratings yet
- Basic Line ProtectionDocument30 pagesBasic Line ProtectionMaduike Obinna HenryNo ratings yet
- Cisco Unified Computing System Blade Server Chassis Power ModesDocument8 pagesCisco Unified Computing System Blade Server Chassis Power Modessaf777No ratings yet
- Overview of Systemd For RHEL 7Document9 pagesOverview of Systemd For RHEL 7MohammedNasserNo ratings yet
- 21.3 Mount Disk PartitionsDocument1 page21.3 Mount Disk PartitionsMohammedNasserNo ratings yet
- 21.1 SystemDocument2 pages21.1 SystemMohammedNasserNo ratings yet
- Customizing Motd: Printmotd NoDocument2 pagesCustomizing Motd: Printmotd NoMohammedNasserNo ratings yet
- Brief guide to corporate email contexts and languageDocument25 pagesBrief guide to corporate email contexts and languageYasminNo ratings yet
- Senior Technical Support Engineer ResumeDocument3 pagesSenior Technical Support Engineer ResumeMohammedNasserNo ratings yet
- Cisco Unified Computing System Blade Server Chassis Power ModesDocument8 pagesCisco Unified Computing System Blade Server Chassis Power Modessaf777No ratings yet
- FDGFDGFDGDocument2 pagesFDGFDGFDGMohammedNasserNo ratings yet
- HVHJBJDocument14 pagesHVHJBJMohammedNasserNo ratings yet
- SfsdfsdfsDocument7 pagesSfsdfsdfsMohammedNasserNo ratings yet
- RtreterterDocument419 pagesRtreterterMohammedNasserNo ratings yet
- New Doc 2018-03-19 PDFDocument14 pagesNew Doc 2018-03-19 PDFMohammedNasserNo ratings yet
- SDGDGFDGDocument6 pagesSDGDGFDGMohammedNasserNo ratings yet
- HBJBJHDocument18 pagesHBJBJHMohammedNasserNo ratings yet
- RtreterterDocument419 pagesRtreterterMohammedNasserNo ratings yet
- EE482 Tutorial 4 A OC CoordinationDocument15 pagesEE482 Tutorial 4 A OC CoordinationMohammedNasserNo ratings yet
- KBJDocument2 pagesKBJMohammedNasserNo ratings yet
- Topic 6: Motor ProtectionDocument15 pagesTopic 6: Motor ProtectionMohammedNasserNo ratings yet
- RtreterterDocument419 pagesRtreterterMohammedNasserNo ratings yet
- RK Kanodia's GATE EC MCQ BookDocument440 pagesRK Kanodia's GATE EC MCQ BookParitam Soni100% (1)
- RK Kanodia's GATE EC MCQ BookDocument440 pagesRK Kanodia's GATE EC MCQ BookParitam Soni100% (1)
- Topic 1a: Fuses: Dr. E. A. FeilatDocument23 pagesTopic 1a: Fuses: Dr. E. A. FeilatMohammedNasserNo ratings yet
- EE482 Tutorial 2 CT VTDocument3 pagesEE482 Tutorial 2 CT VTMohammedNasserNo ratings yet
- HGHJHHJBDocument26 pagesHGHJHHJBMohammedNasserNo ratings yet
- VectorPortal Cristiano Ronaldo VectorDocument1 pageVectorPortal Cristiano Ronaldo VectorMohammedNasserNo ratings yet
- PLC (S7-300)Document2 pagesPLC (S7-300)MohammedNasserNo ratings yet
- Scan Doc App CamScannerDocument2 pagesScan Doc App CamScannerMohammedNasserNo ratings yet
- Chromate Free CoatingsDocument16 pagesChromate Free CoatingsbaanaadiNo ratings yet
- MQC Lab Manual 2021-2022-AutonomyDocument39 pagesMQC Lab Manual 2021-2022-AutonomyAniket YadavNo ratings yet
- British Universal Steel Columns and Beams PropertiesDocument6 pagesBritish Universal Steel Columns and Beams PropertiesjagvishaNo ratings yet
- United-nations-Organization-uno Solved MCQs (Set-4)Document8 pagesUnited-nations-Organization-uno Solved MCQs (Set-4)SãñÂt SûRÿá MishraNo ratings yet
- USDA Guide To CanningDocument7 pagesUSDA Guide To CanningWindage and Elevation0% (1)
- Pemaknaan School Well-Being Pada Siswa SMP: Indigenous ResearchDocument16 pagesPemaknaan School Well-Being Pada Siswa SMP: Indigenous ResearchAri HendriawanNo ratings yet
- CBT For BDDDocument13 pagesCBT For BDDGregg Williams100% (5)
- Iphoneos 31Document159 pagesIphoneos 31Ivan VeBoNo ratings yet
- Essential Rendering BookDocument314 pagesEssential Rendering BookHelton OliveiraNo ratings yet
- Special Power of Attorney: Benedict Joseph M. CruzDocument1 pageSpecial Power of Attorney: Benedict Joseph M. CruzJson GalvezNo ratings yet
- What's Wrong With American Taiwan Policy: Andrew J. NathanDocument14 pagesWhat's Wrong With American Taiwan Policy: Andrew J. NathanWu GuifengNo ratings yet
- Steps To Christ AW November 2016 Page Spreaad PDFDocument2 pagesSteps To Christ AW November 2016 Page Spreaad PDFHampson MalekanoNo ratings yet
- 2018 NAMCYA CHILDREN'S RONDALLA ENSEMBLE GuidelinesDocument3 pages2018 NAMCYA CHILDREN'S RONDALLA ENSEMBLE GuidelinesJohn Cedrick JagapeNo ratings yet
- SNC 2p1 Course Overview 2015Document2 pagesSNC 2p1 Course Overview 2015api-212901753No ratings yet
- Mobile ApplicationDocument2 pagesMobile Applicationdarebusi1No ratings yet
- Equilibruim of Forces and How Three Forces Meet at A PointDocument32 pagesEquilibruim of Forces and How Three Forces Meet at A PointSherif Yehia Al MaraghyNo ratings yet
- Wheeled Loader L953F Specifications and DimensionsDocument1 pageWheeled Loader L953F Specifications and Dimensionssds khanhNo ratings yet
- Eye Bags ReliefDocument27 pagesEye Bags ReliefNatsu DragneelNo ratings yet
- Speed Reducer GearboxDocument14 pagesSpeed Reducer Gearboxعبد للهNo ratings yet
- Basic Features of The Microcredit Regulatory Authority Act, 2006Document10 pagesBasic Features of The Microcredit Regulatory Authority Act, 2006Asif Hasan DhimanNo ratings yet
- Prac Res Q2 Module 1Document14 pagesPrac Res Q2 Module 1oea aoueoNo ratings yet
- SBI Sample PaperDocument283 pagesSBI Sample Paperbeintouch1430% (1)
- Consensus Building e Progettazione Partecipata - Marianella SclaviDocument7 pagesConsensus Building e Progettazione Partecipata - Marianella SclaviWilma MassuccoNo ratings yet
- Job Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaDocument45 pagesJob Order Costing: Patrick Louie E. Reyes, CTT, Micb, Rca, CpaClaudette Clemente100% (1)