You might also like
- Analise de VibraçãoDocument29 pagesAnalise de VibraçãofelipepiglialarmeNo ratings yet
- Construção de modelos vibratóriosDocument59 pagesConstrução de modelos vibratóriosPolly CruzNo ratings yet
- Análise de vibrações a uma banca de potênciaDocument103 pagesAnálise de vibrações a uma banca de potênciaJoelma TurolaNo ratings yet
- 9 CNM TT 03 Datanalise António RoqueDocument10 pages9 CNM TT 03 Datanalise António RoqueFernando César Lima de SoutoNo ratings yet
- Revista AdNormas - Termografia - A Estimativa de Emissividade Com Contato e Sem Contato SuperficialDocument9 pagesRevista AdNormas - Termografia - A Estimativa de Emissividade Com Contato e Sem Contato SuperficialCameras RamonNo ratings yet
- Motores ABB M3000 - M2000 Manual - PT - 12 - 2002Document16 pagesMotores ABB M3000 - M2000 Manual - PT - 12 - 2002Elton PetroliNo ratings yet
- Estudo de Caso - VibraçãoDocument69 pagesEstudo de Caso - VibraçãoSidarta TrovãoNo ratings yet
- Aula 5 - Sistemas Com N GDLDocument19 pagesAula 5 - Sistemas Com N GDLslipcoutNo ratings yet
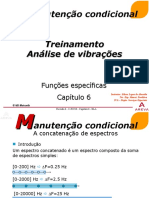
- 06 BR Funções EspecíficasDocument28 pages06 BR Funções EspecíficasEverson MaiaNo ratings yet
- Aula 12 - Diagnostico de Falhas - Parte 2Document15 pagesAula 12 - Diagnostico de Falhas - Parte 2Nelson Antonio De Souza MendesNo ratings yet
- Quadro ilustrativo de diagnósticos de vibraçãoDocument12 pagesQuadro ilustrativo de diagnósticos de vibraçãoPedro RosaNo ratings yet
- Aplicações FFT em VibraçãoDocument15 pagesAplicações FFT em VibraçãoPedra MottaNo ratings yet
- ANÁLISE VIBRAÇÃO-REVISÃO APLICAÇÕESDocument9 pagesANÁLISE VIBRAÇÃO-REVISÃO APLICAÇÕESMarcio Souza de CarvalhoNo ratings yet
- Análise Vibração Manutenção PreditivaDocument23 pagesAnálise Vibração Manutenção PreditivaManinthebox ManNo ratings yet
- Apostila Utfpr Vibracao Mi P1Document47 pagesApostila Utfpr Vibracao Mi P1Alexsson SantosNo ratings yet
- Tipos de Espectros e DiagnósticosDocument42 pagesTipos de Espectros e DiagnósticosGleycon PereiraNo ratings yet
- Termografia Final - ManutençãoDocument122 pagesTermografia Final - ManutençãoHeber SilvaNo ratings yet
- Análise de RedutoresDocument160 pagesAnálise de RedutoresPatrick Jove100% (1)
- Absorvedor dinâmico de vibraçãoDocument7 pagesAbsorvedor dinâmico de vibraçãoAndré DaneluzziNo ratings yet
- Causas e efeitos da vibração em máquinasDocument4 pagesCausas e efeitos da vibração em máquinasWant3d StrikeNo ratings yet
- 6) Vibração IIDocument122 pages6) Vibração IIJuliana Queiroz100% (1)
- FMEA para Plano de Manutenção de RedutorDocument13 pagesFMEA para Plano de Manutenção de RedutorDavid Ferreira SilvnoNo ratings yet
- Ens Coroa e Parafuso Sem FimDocument8 pagesEns Coroa e Parafuso Sem FimDiogo MarraNo ratings yet
- Vibração Nivel I - Manuel CaoDocument29 pagesVibração Nivel I - Manuel CaoPedro RosaNo ratings yet
- Redutor Falk - 505 Abxu4Document1 pageRedutor Falk - 505 Abxu4Solver Manutenção IndustrialNo ratings yet
- Curso Engenharia Mecânica VibraçõesDocument31 pagesCurso Engenharia Mecânica VibraçõesEdward Allyson Caricio de MenezesNo ratings yet
- Análise de Vibrações Mecânicas 2.0Document29 pagesAnálise de Vibrações Mecânicas 2.0Vanuti MascarenhasNo ratings yet
- Balanceamento Metodo Tres Pontos 10005387Document52 pagesBalanceamento Metodo Tres Pontos 10005387marciofelipessantosNo ratings yet
- VIB - 003 PeakVue e Suas AplicaçõesDocument28 pagesVIB - 003 PeakVue e Suas AplicaçõesManoel CosmeNo ratings yet
- Modulo 4 Engenharia ManutençãoDocument68 pagesModulo 4 Engenharia ManutençãoNetto GaloNo ratings yet
- Ferrografia como técnica de manutenção preditivaDocument20 pagesFerrografia como técnica de manutenção preditivaFábio RibeiroNo ratings yet
- Análise de Vibrações em Compressores - DMCDocument10 pagesAnálise de Vibrações em Compressores - DMCMartinsNo ratings yet
- Apostila - Análise de ÓleoDocument71 pagesApostila - Análise de ÓleoJoão Paulo Pereira da costaNo ratings yet
- Previsão de Falha de Rolamentos Por Análise Espectral e de Envelope PDFDocument10 pagesPrevisão de Falha de Rolamentos Por Análise Espectral e de Envelope PDFWanderson SantosNo ratings yet
- Inspeção detecta defeito em inversor de frequênciaDocument4 pagesInspeção detecta defeito em inversor de frequênciaSamuel CostaNo ratings yet
- Balanceamento estático e vibrações em máquinasDocument19 pagesBalanceamento estático e vibrações em máquinasEdson AndradeNo ratings yet
- Análise de vibrações mecânicas e identificação de defeitos em máquinasDocument29 pagesAnálise de vibrações mecânicas e identificação de defeitos em máquinasDo Fred100% (2)
- 5.0 PT-BR 2020-02 TS.3069.60HzDocument40 pages5.0 PT-BR 2020-02 TS.3069.60HzMacchi_RJNo ratings yet
- TermografiaDocument92 pagesTermografiaEduardo BovaretoNo ratings yet
- Parametrização de Vibração em Equipamentos AlternativosDocument20 pagesParametrização de Vibração em Equipamentos AlternativosCesar SampaioNo ratings yet
- AlinhamentoDocument7 pagesAlinhamentoLeonardoFerreiraNo ratings yet
- Peneira Rotativa PDFDocument2 pagesPeneira Rotativa PDFFrancoNo ratings yet
- Relatório de intervenção de manutenção em bomba de alimentaçãoDocument7 pagesRelatório de intervenção de manutenção em bomba de alimentaçãoielvis souza100% (2)
- Análise de vibrações em máquinasDocument80 pagesAnálise de vibrações em máquinasMarcos Freitas100% (1)
- Falha de Rolamentos Fase 3 BPFIDocument1 pageFalha de Rolamentos Fase 3 BPFILuisSilvaNo ratings yet
- Envelope de Aceleração. Evite-O!Document4 pagesEnvelope de Aceleração. Evite-O!LuisSilvaNo ratings yet
- 3 Sensores de VibraçãoDocument16 pages3 Sensores de VibraçãoRenanNo ratings yet
- Diagnóstico de avarias em máquinas por análise de vibraçõesDocument44 pagesDiagnóstico de avarias em máquinas por análise de vibraçõesjairo judsonNo ratings yet
- Curso de Análise de Vibração RDocument5 pagesCurso de Análise de Vibração RLourismar VicenteNo ratings yet
- Análise de Vibração DAE Corumbatai RelatórioDocument12 pagesAnálise de Vibração DAE Corumbatai RelatórioCesar SampaioNo ratings yet
- Análise de vibrações de máquinas rotativasDocument35 pagesAnálise de vibrações de máquinas rotativasEverson Maia100% (1)
- Aula 01 - Metodos de Diagnosticos de Maquinas - Parte 1Document30 pagesAula 01 - Metodos de Diagnosticos de Maquinas - Parte 1tralha120% (1)
- 3.a Aula - IMFDM - Análise de VibraçõesDocument52 pages3.a Aula - IMFDM - Análise de VibraçõesCleber CardozoNo ratings yet
- Análise Vibrações MecânicasDocument35 pagesAnálise Vibrações MecânicasSergio Leite SilvaNo ratings yet
- Fundamentos da Análise de VibraçõesDocument21 pagesFundamentos da Análise de VibraçõesFabinho GarciaNo ratings yet
- Curso VE - Análise de Vibração Nível IDocument99 pagesCurso VE - Análise de Vibração Nível IAndré Luís CostaNo ratings yet
- Análise de VibraçõesDocument91 pagesAnálise de VibraçõesDeise Tatiana ArgoloNo ratings yet
- Apostila Analise de Vibração PDFDocument33 pagesApostila Analise de Vibração PDFFrederico Meireles100% (1)
- 02 - BR - Análise - de - VibraçãoDocument37 pages02 - BR - Análise - de - VibraçãoDione AlvesNo ratings yet
- Prova 39 - Engenheiro (A) de Equipamentos Júnior - MecânicaDocument15 pagesProva 39 - Engenheiro (A) de Equipamentos Júnior - Mecânicajoca80No ratings yet
- Trabalho 1Document1 pageTrabalho 1Ramon CardosoNo ratings yet
- Tarde - Prova 11 - Engenheiro de Equipamentos Júnior - MecânicaDocument19 pagesTarde - Prova 11 - Engenheiro de Equipamentos Júnior - MecânicaVitor PinheiroNo ratings yet
- TP1 ApDocument4 pagesTP1 ApRamon CardosoNo ratings yet
- ATIVIDADE 2 - Forças IntermolecularesDocument5 pagesATIVIDADE 2 - Forças IntermolecularesRamon CardosoNo ratings yet
- 59 F 65 de 5 e 5556Document3 pages59 F 65 de 5 e 5556Ramon CardosoNo ratings yet
- 59 F 65 de 5 e 5556Document3 pages59 F 65 de 5 e 5556Ramon CardosoNo ratings yet
- Otimização Multivariada E Aplicação Do Sorvente Sio - NB O para Determinação em Linha de Ni (Ii) em Matriz AquosaDocument7 pagesOtimização Multivariada E Aplicação Do Sorvente Sio - NB O para Determinação em Linha de Ni (Ii) em Matriz AquosaRamon CardosoNo ratings yet
- 03 Oxidos Joana 31c PDFDocument4 pages03 Oxidos Joana 31c PDFRamon CardosoNo ratings yet
- Trabalho2 PDFDocument2 pagesTrabalho2 PDFRamon CardosoNo ratings yet
- 03 Oxidos Joana 31c PDFDocument4 pages03 Oxidos Joana 31c PDFRamon CardosoNo ratings yet
- Atividade 1 - A Hibridação de OrbitaisDocument4 pagesAtividade 1 - A Hibridação de OrbitaisRamon CardosoNo ratings yet
- 1 Lista de ExercíciosDocument1 page1 Lista de ExercíciosRamon CardosoNo ratings yet
- Listas Exercicios EME101Document39 pagesListas Exercicios EME101Ramon CardosoNo ratings yet
- Reações SN e E de haletos de alquilaDocument21 pagesReações SN e E de haletos de alquilaRamon Cardoso67% (3)
- Química dos compostos de carbono: conformação e estabilidade de alcanos e cicloalcanosDocument6 pagesQuímica dos compostos de carbono: conformação e estabilidade de alcanos e cicloalcanosRamon CardosoNo ratings yet
- Histórico da Microbiologia: da descoberta dos microrganismos à ciênciaDocument2 pagesHistórico da Microbiologia: da descoberta dos microrganismos à ciênciaBeatriz Albuquerque87% (15)
- Microscopia Básica2Document25 pagesMicroscopia Básica2api-373663492% (12)
- Orientações para Relatório de Aula Prática de Microbiologia PDFDocument1 pageOrientações para Relatório de Aula Prática de Microbiologia PDFRamon CardosoNo ratings yet
- Aula 1 - A Química Do Carbono e Átomos Mais Comuns Ligados A EleDocument13 pagesAula 1 - A Química Do Carbono e Átomos Mais Comuns Ligados A EleRamon CardosoNo ratings yet
- Resposta Comentada - Ácidos e BasesDocument20 pagesResposta Comentada - Ácidos e BasesRamon CardosoNo ratings yet
- Primeira Prova de Mec Ónica Dos S Lidos PDFDocument1 pagePrimeira Prova de Mec Ónica Dos S Lidos PDFRamon CardosoNo ratings yet
- Cronograma Da OBMEP - Documentos GoogleDocument56 pagesCronograma Da OBMEP - Documentos GoogleMarilia MottaNo ratings yet
- CA Magazine Mai03 CasasinteligentesDocument1 pageCA Magazine Mai03 Casasinteligentessandro868No ratings yet
- Afiliados Hotmart Como Eu Devo Fazer - (Guia Completo) .Document10 pagesAfiliados Hotmart Como Eu Devo Fazer - (Guia Completo) .Claudio Gomes Silva LeiteNo ratings yet
- AtalhosDocument13 pagesAtalhosJuliana CardosoNo ratings yet
- Monitores CRTDocument50 pagesMonitores CRTRodrigomsoaresNo ratings yet
- PDFDocument16 pagesPDFFlavioRozaBatalhaNo ratings yet
- Prática Profissional I - Atividade 04Document2 pagesPrática Profissional I - Atividade 04João Álvaro100% (1)
- Exercicios MicrocontroladoresDocument13 pagesExercicios MicrocontroladoresRobson CastroNo ratings yet
- Banco de Dados I - Transações e Controle de ConcorrênciaDocument39 pagesBanco de Dados I - Transações e Controle de Concorrênciamfomoura1No ratings yet
- Manual de Configuração REMUX IS720LADocument15 pagesManual de Configuração REMUX IS720LAEngenhariaNo ratings yet
- ABAA - Depreciação Do Ativo Fixo - Depreciação ExtraordiáriaDocument4 pagesABAA - Depreciação Do Ativo Fixo - Depreciação ExtraordiáriaLaura NunesNo ratings yet
- Slides01 DesenvolvimentoWebDocument43 pagesSlides01 DesenvolvimentoWebFelipe TardivoNo ratings yet
- Informática Aplicada à ModaDocument47 pagesInformática Aplicada à ModaRejane WronowskiNo ratings yet
- Switch 3comDocument13 pagesSwitch 3comThais RamosNo ratings yet
- Grade Curricular Direito USP PDFDocument1 pageGrade Curricular Direito USP PDFpgn999No ratings yet
- Curso Livre - AutoCAD 2018 - Professional - Senac São PauloDocument3 pagesCurso Livre - AutoCAD 2018 - Professional - Senac São PauloDenner Melo FreitasNo ratings yet
- Controlador de Válvula Digital FIELDVUE DVC6200 Da Fisher: ÍndiceDocument108 pagesControlador de Válvula Digital FIELDVUE DVC6200 Da Fisher: ÍndiceRicardo RodriguesNo ratings yet
- Web CamDocument9 pagesWeb CamMarcos Moura RamosNo ratings yet
- QuickStart Miotec-V5Document13 pagesQuickStart Miotec-V5Lucas KleinNo ratings yet
- Winsup 2Document76 pagesWinsup 2Stile MarcenariaNo ratings yet
- DDL DML banco dados definir manipularDocument21 pagesDDL DML banco dados definir manipularValtinhoNo ratings yet
- Gabarito Oficial de InformáticaDocument16 pagesGabarito Oficial de InformáticaNatália GabrielaNo ratings yet
- Seccionalizador trifásico SF6 isola falhasDocument8 pagesSeccionalizador trifásico SF6 isola falhasWilson Albert Ramos GuerrerosNo ratings yet
- PA-431 - Aspectos Ambientais-V2Document4 pagesPA-431 - Aspectos Ambientais-V2fabioNo ratings yet
- NBR Iso 12207 PDFDocument35 pagesNBR Iso 12207 PDFMauro Mendes100% (2)
- Algebra BooleanaDocument3 pagesAlgebra BooleanaSamuel RibeiroNo ratings yet
- Como Aplicar A LGPD em Sua Organização - Sandro OliveiraDocument250 pagesComo Aplicar A LGPD em Sua Organização - Sandro OliveiraThiago Mele Marketing DigitalNo ratings yet
- Exercícios Resolvidos: Raiz ComplexaDocument4 pagesExercícios Resolvidos: Raiz ComplexaDiego OliveiraNo ratings yet
- Propagação via satélite em Banda KuDocument20 pagesPropagação via satélite em Banda KuIsrael FrankeNo ratings yet
- Carta ABES val. 15.06.24Document5 pagesCarta ABES val. 15.06.24Júnio JorgeNo ratings yet