You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- BS 5950 Part 1.SHS DesignDocument55 pagesBS 5950 Part 1.SHS DesignOliveraNo ratings yet
- International Building Code 2006.section 1613Document6 pagesInternational Building Code 2006.section 1613Alwin Victor WilliamsNo ratings yet
- Abus-Double Girder CraneDocument3 pagesAbus-Double Girder CraneAlwin Victor WilliamsNo ratings yet
- Is 1343 1980 PDFDocument68 pagesIs 1343 1980 PDFpriyankaNo ratings yet
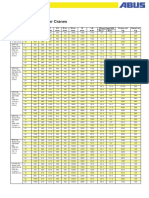
- Dimensions of ELV/ELK Single Girder CranesDocument1 pageDimensions of ELV/ELK Single Girder CranesAlwin Victor WilliamsNo ratings yet
- WeldDocument52 pagesWeldAlwin Victor Williams100% (1)
- SP24Document183 pagesSP24api-3809106No ratings yet
- American App Examples 2007 CompleteDocument388 pagesAmerican App Examples 2007 CompleteJay NatoNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mini Project ReportDocument32 pagesMini Project ReportHimanshu Sharma100% (1)
- History of World Art, Architecture & Interior DesignDocument196 pagesHistory of World Art, Architecture & Interior DesignRamcy AddulamNo ratings yet
- CH 01-ColumnsDocument30 pagesCH 01-Columnsnvnrev100% (1)
- Archicad Template For Architectural Offices: Joonas JõeveeDocument46 pagesArchicad Template For Architectural Offices: Joonas JõeveePaunita BoancaNo ratings yet
- Tekla Joint MapDocument70 pagesTekla Joint MapharisleeNo ratings yet
- Engr. Mark Christian D. EsguerraDocument1 pageEngr. Mark Christian D. EsguerraMARKCHRISTMASNo ratings yet
- The Story of Architecture - GympelDocument61 pagesThe Story of Architecture - GympelnoraNo ratings yet
- Isolated Footing Design CalculationsDocument64 pagesIsolated Footing Design CalculationsMark Roger Huberit IINo ratings yet
- Outrigger-Braced Systems in Tall Buildings: Figure 1: Tension Compression Couple (Lame, 2008)Document10 pagesOutrigger-Braced Systems in Tall Buildings: Figure 1: Tension Compression Couple (Lame, 2008)Wulan Swarna PutriNo ratings yet
- Analysis and Design of High Rise Building FramesDocument3 pagesAnalysis and Design of High Rise Building FramesRanvier Singh100% (1)
- ACI-352.1R-89 Recommendations For Design of Slab-Column Connections in Monolithic Reinforced Concrete Structures PDFDocument26 pagesACI-352.1R-89 Recommendations For Design of Slab-Column Connections in Monolithic Reinforced Concrete Structures PDFanhoangbac100% (1)
- Construction of Boundary Wall For Mr. Kugan at Kokuvil: Removing of Fence and Site ClearingDocument48 pagesConstruction of Boundary Wall For Mr. Kugan at Kokuvil: Removing of Fence and Site ClearingNavam NanthanNo ratings yet
- Lesson 01 - BasicModeling1 - Steel - Precast PDFDocument50 pagesLesson 01 - BasicModeling1 - Steel - Precast PDFmihai_purcaru1888No ratings yet
- Designing With Structural TubingDocument9 pagesDesigning With Structural TubingrilopiyNo ratings yet
- Equivalent Frame Method SampleDocument25 pagesEquivalent Frame Method SampleReiBañezNo ratings yet
- DriftDocument4 pagesDriftsunilr_60No ratings yet
- Structural Design Requirements for Steel Moment Frame ConnectionsDocument4 pagesStructural Design Requirements for Steel Moment Frame ConnectionsDavidQNo ratings yet
- Permissible Stresses and Shear Stress in ConcreteDocument37 pagesPermissible Stresses and Shear Stress in ConcreteKasiNo ratings yet
- Structural Design of Combined FootingsDocument6 pagesStructural Design of Combined Footingsselina100% (1)
- IJSRDV7I40588Document4 pagesIJSRDV7I40588Mohan kumar R.kNo ratings yet
- ESP Project Status ReportDocument6 pagesESP Project Status Reportmanish2089No ratings yet
- 2006 Structural Seismic Design Manual 1Document32 pages2006 Structural Seismic Design Manual 1Julio Rafael Terrones Vásquez100% (1)
- Exercise Chapter2 3552Document5 pagesExercise Chapter2 3552Khuon RatanaNo ratings yet
- Strut and TieDocument25 pagesStrut and Tiesebby_s20No ratings yet
- Tek 5-5B Integrating Concrete Masonry Walls With Metal Building SystemsDocument4 pagesTek 5-5B Integrating Concrete Masonry Walls With Metal Building Systemsclam2014No ratings yet
- Column N Foundation DesignDocument26 pagesColumn N Foundation DesignSA023No ratings yet
- Copper Slag - Phase 1Document18 pagesCopper Slag - Phase 1Shreedhar KulalNo ratings yet
- UNIT CONVERSION AND BUILDING LAYOUT CALCULATIONSDocument41 pagesUNIT CONVERSION AND BUILDING LAYOUT CALCULATIONSEr Puspendra Pratap SinghNo ratings yet
- UMESH RIJAL Analysis ReportDocument43 pagesUMESH RIJAL Analysis ReportsudarshanNo ratings yet
- Shear Strength of SlabDocument3 pagesShear Strength of Slabaleena4No ratings yet