You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- DIY - Basic Cylinder Head Porting - Standard Abrasives Motor Sports PDFDocument10 pagesDIY - Basic Cylinder Head Porting - Standard Abrasives Motor Sports PDFkristof2273No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Euro IV BH117L Trans ManualDocument748 pagesEuro IV BH117L Trans ManualOlga PlohotnichenkoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Cummins D1703 Engine Parts Catalog PDFDocument72 pagesCummins D1703 Engine Parts Catalog PDFxxxxxxxxxxxxxxxxxxx100% (2)
- Three Dimensional Static and Dynamic Analysis of StructuresDocument506 pagesThree Dimensional Static and Dynamic Analysis of StructuresConan EdogawaNo ratings yet
- Weak Story Check-ColumnDocument4 pagesWeak Story Check-ColumnConan EdogawaNo ratings yet
- Engg EconDocument1 pageEngg EconConan EdogawaNo ratings yet
- X y Z X Yz: Weekend Seshhh: Engineering Edition Session 1: AlgebraDocument2 pagesX y Z X Yz: Weekend Seshhh: Engineering Edition Session 1: AlgebraConan EdogawaNo ratings yet
- Session 2 Trigonometry - HandoutDocument1 pageSession 2 Trigonometry - HandoutConan EdogawaNo ratings yet
- Weekend Seshhh: Engineering Edition Session 3: Plane and Solid GeometryDocument5 pagesWeekend Seshhh: Engineering Edition Session 3: Plane and Solid GeometryConan EdogawaNo ratings yet
- RC Slab Design - S1Document8 pagesRC Slab Design - S1Conan EdogawaNo ratings yet
- TEMPLATESDocument2 pagesTEMPLATESConan EdogawaNo ratings yet
- RC Footing Design - F1Document2 pagesRC Footing Design - F1Conan EdogawaNo ratings yet
- Ep 15Document5 pagesEp 15Conan EdogawaNo ratings yet
- Composite Beams With Formed Steel Deck: John A. Grant, JR., John W. Fisher, and Roger G. SlutterDocument20 pagesComposite Beams With Formed Steel Deck: John A. Grant, JR., John W. Fisher, and Roger G. SlutterConan EdogawaNo ratings yet
- Find The Shortest Possible Time (In Seconds) That Tommy Must Take To Run To Be Able To Catch Up With Pepito?Document2 pagesFind The Shortest Possible Time (In Seconds) That Tommy Must Take To Run To Be Able To Catch Up With Pepito?Conan EdogawaNo ratings yet
- Simplified Frame Design of Type PR ConstructionDocument6 pagesSimplified Frame Design of Type PR ConstructionConan EdogawaNo ratings yet
- Scia Engineer MOOT 2011 ENGDocument8 pagesScia Engineer MOOT 2011 ENGConan EdogawaNo ratings yet
- C ChannelDocument1 pageC ChannelConan EdogawaNo ratings yet
- Astm C12Document7 pagesAstm C12omarguillermogarzon100% (1)
- Ncode Designlife BrochureDocument4 pagesNcode Designlife BrochuredelaneylukeNo ratings yet
- ASME Boiler and Pressure Vessel Code, Section III NF, EditioDocument101 pagesASME Boiler and Pressure Vessel Code, Section III NF, EditiorazvannuNo ratings yet
- XTRACT Calculul Unui Perete de B.ADocument1 pageXTRACT Calculul Unui Perete de B.AHDu13No ratings yet
- Enthalpy - Thermodynamics Questions and Answers - SanfoundryDocument8 pagesEnthalpy - Thermodynamics Questions and Answers - SanfoundryBhardwaj Rajinder SippyNo ratings yet
- ZL-7901A en V2.6b PDFDocument8 pagesZL-7901A en V2.6b PDFElio Jose Burgos Brieva100% (1)
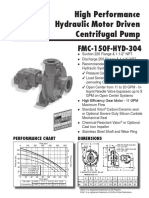
- FMC-150F-HYD-304 - 04-13 Bomba AceDocument2 pagesFMC-150F-HYD-304 - 04-13 Bomba AceEmerson GomesNo ratings yet
- Wiring Layout For Dta EcuDocument5 pagesWiring Layout For Dta EcuJay Daffurn100% (3)
- Brochure ES-220 UHP Electric Skids PDFDocument2 pagesBrochure ES-220 UHP Electric Skids PDFvenky4025No ratings yet
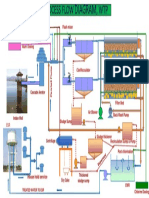
- WTP Process DiagramDocument1 pageWTP Process DiagramKumar AbhishekNo ratings yet
- SWD Pipe Size Calculation For South CampusDocument4 pagesSWD Pipe Size Calculation For South Campussalmaan mastanNo ratings yet
- 下载Document4 pages下载Mars JackNo ratings yet
- Extensive Applications of PM Gears: FocusDocument4 pagesExtensive Applications of PM Gears: FocusAAAHNo ratings yet
- PC2 - Practice Exam WorkedDocument12 pagesPC2 - Practice Exam WorkednomsyNo ratings yet
- Fabrication of Turbocharger For Two Wheeler: Ahir Nischal A, Sofia Ali A, Darshan S Shah, Sneh R PrajapatiDocument8 pagesFabrication of Turbocharger For Two Wheeler: Ahir Nischal A, Sofia Ali A, Darshan S Shah, Sneh R PrajapatiDeepak sutarNo ratings yet
- Outdoor Unit Indoor Unit: Excellent Ecodan's Heating Performance, Even at Low Outdoor Temperature!Document19 pagesOutdoor Unit Indoor Unit: Excellent Ecodan's Heating Performance, Even at Low Outdoor Temperature!Ивайло СтояновNo ratings yet
- Offshore Pipe Line Design State of The ArtDocument33 pagesOffshore Pipe Line Design State of The ArtMvrnaidu MithraNo ratings yet
- Installation, Operation, Maintenance, Repair and Troubleshooting Instructions For THE ZSE Fire PumpDocument119 pagesInstallation, Operation, Maintenance, Repair and Troubleshooting Instructions For THE ZSE Fire PumpKashif MasudNo ratings yet
- BTech 1st Sem: Mechanical Science: Stress & StrainDocument10 pagesBTech 1st Sem: Mechanical Science: Stress & StrainTechno India Group100% (1)
- RAC GRADE 9 Q1 W 4 M 4 FINAlDocument11 pagesRAC GRADE 9 Q1 W 4 M 4 FINAlOviya EikoNo ratings yet
- Clutch Actuator & TCM AssemblyDocument13 pagesClutch Actuator & TCM AssemblyVinh XuânNo ratings yet
- Soumitra Sattikar - CSV 2021-1Document2 pagesSoumitra Sattikar - CSV 2021-1pavanNo ratings yet
- BEL - 6D Through Conduit GateDocument2 pagesBEL - 6D Through Conduit Gateasoka.pwNo ratings yet
- 2p36907 SwivelDocument42 pages2p36907 SwivelIFI ARGENTINA S.A.No ratings yet
- Motorcycle CatalogDocument24 pagesMotorcycle CatalogCarsten JakobsenNo ratings yet
- Ref. 6.20 - PetytDocument11 pagesRef. 6.20 - PetytVinicius RupelNo ratings yet
- Installation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpsDocument28 pagesInstallation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpspinplataNo ratings yet