You might also like
- Trabalho de Motor de PassoDocument23 pagesTrabalho de Motor de Passosaulomachado8262No ratings yet
- Relatório Máquina CCDocument29 pagesRelatório Máquina CCAdrian AlanNo ratings yet
- Comparativo entre motores CC e motores de indução trifásicosDocument7 pagesComparativo entre motores CC e motores de indução trifásicoscamilinhabantuNo ratings yet
- Fluxo de potência: Teoria e implementação de códigos computacionaisFrom EverandFluxo de potência: Teoria e implementação de códigos computacionaisNo ratings yet
- Análise das condições de operação e não operação de um relé de distância em uma linha de transmissãoDocument2 pagesAnálise das condições de operação e não operação de um relé de distância em uma linha de transmissãoSolange Antonio Carlos100% (1)
- ConversãoDocument43 pagesConversãoRamon ResendeNo ratings yet
- Construção de Um Amperímetro PDFDocument2 pagesConstrução de Um Amperímetro PDFHadassa Oliveira Cathoud100% (1)
- Sistema de arranque: componentes e funcionamento do motor de arranqueDocument59 pagesSistema de arranque: componentes e funcionamento do motor de arranqueGABRIEL DOS SANTOS DE LIMANo ratings yet
- Industria MazaDocument14 pagesIndustria MazaOsvaldo Santos MaziveNo ratings yet
- Lista maquinasIIDocument4 pagesLista maquinasIICaio MarianoNo ratings yet
- Capítulo 4 - Condicionadores de SinalDocument21 pagesCapítulo 4 - Condicionadores de SinalJoão Lourenço CussondamaNo ratings yet
- mAQUINAS CCDocument17 pagesmAQUINAS CCeduardomiranda2011No ratings yet
- Sistema de ControleDocument10 pagesSistema de ControleMarcio Mian0% (1)
- Maquinas EletricasDocument12 pagesMaquinas Eletricasrogeriolopesdacosta100% (2)
- Aula 20 290508Document26 pagesAula 20 290508Alexandre Ungaretti100% (1)
- Exercícios sobre máquinas CCDocument6 pagesExercícios sobre máquinas CCVictor Yuji SatoNo ratings yet
- Questionario EletrotécnicaDocument3 pagesQuestionario EletrotécnicacarlosmarciosfreitasNo ratings yet
- Operação de cicloconversores e controle de tensão de saídaDocument7 pagesOperação de cicloconversores e controle de tensão de saídaDaniel OliboniNo ratings yet
- Transformadores de potência: exercícios sobre circuitos equivalentes e cálculo de grandezas elétricasDocument7 pagesTransformadores de potência: exercícios sobre circuitos equivalentes e cálculo de grandezas elétricasesierra20No ratings yet
- Concurso Eletricista TuntumDocument5 pagesConcurso Eletricista TuntumValéria GuerlandoNo ratings yet
- Motores CC: Características e FuncionamentoDocument43 pagesMotores CC: Características e FuncionamentofaustogvNo ratings yet
- Conceito e estrutura básica do PLCDocument25 pagesConceito e estrutura básica do PLCtatiana pinto0% (1)
- MotInduçãoExercíciosDocument12 pagesMotInduçãoExercíciosAlbino Vieira100% (2)
- Turbina FrancisDocument31 pagesTurbina FrancisAnonymous py6o2XTYWNo ratings yet
- Máquinas Elétricas RotativasDocument27 pagesMáquinas Elétricas Rotativaskfbovo100% (1)
- 5 - Primeiro Motor: 5.1 - Dimensionamento Dos ContatoresDocument11 pages5 - Primeiro Motor: 5.1 - Dimensionamento Dos ContatoresAndré Lucas Machado LinsNo ratings yet
- Aula 4. Condicionadores de Sinal PDFDocument34 pagesAula 4. Condicionadores de Sinal PDFEderson ZanchetNo ratings yet
- Aspectos Gerais dos Sistemas de Distribuição de Energia ElétricaDocument13 pagesAspectos Gerais dos Sistemas de Distribuição de Energia ElétricaJosé Haislan100% (1)
- Exer MaquinaseletricasDocument8 pagesExer MaquinaseletricasLuiz JesusNo ratings yet
- Máquina CCDocument27 pagesMáquina CCÁlvaro CamposNo ratings yet
- 002 Partida de Motores Por ReostatoDocument35 pages002 Partida de Motores Por ReostatoDjalma GalindoNo ratings yet
- Fluxo de potência com método de Newton RaphsonDocument47 pagesFluxo de potência com método de Newton RaphsonRômulo RodriguesNo ratings yet
- Tutorial de Comunicação Do CLP TPW03 para Driver ModbusDocument3 pagesTutorial de Comunicação Do CLP TPW03 para Driver ModbusLeandro BaranNo ratings yet
- Exercício - 2 - SubestaçõesDocument2 pagesExercício - 2 - Subestaçõesmjla0407No ratings yet
- Motores CC: tipos e aplicaçõesDocument4 pagesMotores CC: tipos e aplicaçõesJoão EduardoNo ratings yet
- Exercício - 1 - Gerador SíncronoDocument2 pagesExercício - 1 - Gerador Síncronomjla0407No ratings yet
- Compensação de Reativos em Linha de TransmissãoDocument6 pagesCompensação de Reativos em Linha de TransmissãoGRVCientistaNo ratings yet
- 2 Aula ScadaDocument4 pages2 Aula ScadaPatrícia Machado Sebajos VazNo ratings yet
- 3-Controle-I-Função de Transferência e Diagrama de Blocos PDFDocument41 pages3-Controle-I-Função de Transferência e Diagrama de Blocos PDFLucas Nunes100% (1)
- Quando utilizar módulo frenagem inversor frequênciaDocument3 pagesQuando utilizar módulo frenagem inversor frequênciaDaniel FerrariNo ratings yet
- Exercícios de Chaves de Partida Mnp1it0Document9 pagesExercícios de Chaves de Partida Mnp1it0DAYANNE SOUZA RODRIGUES GAMANo ratings yet
- Relés Inteligentes TeSys T com Funções de Proteção e ControleDocument6 pagesRelés Inteligentes TeSys T com Funções de Proteção e ControleLeandro cordeiroNo ratings yet
- Motores de Indução Trifásicos: Partida e Circuito EquivalenteDocument56 pagesMotores de Indução Trifásicos: Partida e Circuito Equivalentedriano22100% (1)
- Conversor CA-cc Diodo ExerciciosDocument5 pagesConversor CA-cc Diodo ExerciciosDiego GaldinoNo ratings yet
- Automatismos e autómatos: Controlo de processos industriaisDocument27 pagesAutomatismos e autómatos: Controlo de processos industriaisHugo Ferreira PintoNo ratings yet
- WEG Linha de ProdutosDocument40 pagesWEG Linha de ProdutosJanaina GomesNo ratings yet
- CE Aula 02 TransformadoresDocument47 pagesCE Aula 02 TransformadoresJbprofessor BatistaNo ratings yet
- Exercícios de Máquinas Elétricas - Máquinas de InduçãoDocument3 pagesExercícios de Máquinas Elétricas - Máquinas de InduçãoRivanildo AlvesNo ratings yet
- Autómatos ProgramáveisDocument29 pagesAutómatos Programáveiscmmateus2836No ratings yet
- Amplificadores Classe A, B e ABDocument19 pagesAmplificadores Classe A, B e ABMarcus Winicius de OliveiraNo ratings yet
- Lista de Exercícios Motor CCDocument1 pageLista de Exercícios Motor CCCarol HammerschmidtNo ratings yet
- Esquema de Força e Comando Chave Compensadora Com ReversãoDocument18 pagesEsquema de Força e Comando Chave Compensadora Com ReversãomateusheNo ratings yet
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoFrom EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNo ratings yet
- Bateria De Gravidade: Convertendo energia gravitacional em eletricidadeFrom EverandBateria De Gravidade: Convertendo energia gravitacional em eletricidadeNo ratings yet
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoFrom EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo ratings yet
- Sistemas de NumeraçãoDocument42 pagesSistemas de NumeraçãoCelso CiamponiNo ratings yet
- Controle Estatístico da QualidadeDocument45 pagesControle Estatístico da QualidadeCelso CiamponiNo ratings yet
- Circuitos Digitais ApresentaçãoDocument18 pagesCircuitos Digitais ApresentaçãoCelso CiamponiNo ratings yet
- Resolução Unidade 4 - CDDocument19 pagesResolução Unidade 4 - CDCelso CiamponiNo ratings yet
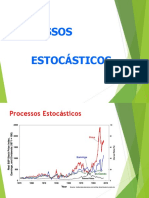
- Processos Estocásticos: conceitos e exemplosDocument53 pagesProcessos Estocásticos: conceitos e exemplosCelso CiamponiNo ratings yet
- Questões de Álgebra sobre Razão, Proporção, Porcentagem e EquaçõesDocument4 pagesQuestões de Álgebra sobre Razão, Proporção, Porcentagem e EquaçõesCelso CiamponiNo ratings yet
- Processos de Markov emDocument34 pagesProcessos de Markov emCelso CiamponiNo ratings yet
- 04 Aula Processos Estocasticos - R1 - Nascimento e Morte & FilasDocument81 pages04 Aula Processos Estocasticos - R1 - Nascimento e Morte & FilasCelso CiamponiNo ratings yet
- 06 Aula Processos Estocasticos - Medidas Descritivas e Gráficos BásicosDocument46 pages06 Aula Processos Estocasticos - Medidas Descritivas e Gráficos BásicosCelso CiamponiNo ratings yet
- Progressões aritméticas e geométricas em exercícios de vestibularesDocument3 pagesProgressões aritméticas e geométricas em exercícios de vestibularesCelso CiamponiNo ratings yet
- Probabilidade de eventos aleatóriosDocument91 pagesProbabilidade de eventos aleatóriosCelso CiamponiNo ratings yet
- ApostilaArena PDFDocument33 pagesApostilaArena PDFgiovanetjhowNo ratings yet
- 13 Letreiro Digital Com LCDDocument3 pages13 Letreiro Digital Com LCDCelso CiamponiNo ratings yet
- Progressão Aritmética e Geométrica: Conceitos e PropriedadesDocument62 pagesProgressão Aritmética e Geométrica: Conceitos e PropriedadesCelso CiamponiNo ratings yet
- Apendice U4 CemeDocument4 pagesApendice U4 CemeCelso CiamponiNo ratings yet
- SIMULADO3ANO3BIM2013matematica PDFDocument5 pagesSIMULADO3ANO3BIM2013matematica PDFJorge VidalNo ratings yet
- Progressão Aritmética e GeométricaDocument37 pagesProgressão Aritmética e GeométricaCelso CiamponiNo ratings yet
- Configuração de Anel Fechado Entre Dois AlimentadoresDocument23 pagesConfiguração de Anel Fechado Entre Dois Alimentadoresalisson pereiraNo ratings yet
- 2007092602Document109 pages2007092602rogerio.salustianoNo ratings yet
- LCD Arduino 16x2Document3 pagesLCD Arduino 16x2Celso CiamponiNo ratings yet
- Aprendendo A Programar em ArduinoDocument49 pagesAprendendo A Programar em ArduinoLeandro Teixeira100% (2)
- U1S2 - Formulação e Resolução Do Problema de Fluxo de CargaDocument30 pagesU1S2 - Formulação e Resolução Do Problema de Fluxo de CargaCelso CiamponiNo ratings yet
- Lista de Exercicios - ELE505 - Parte1 PDFDocument10 pagesLista de Exercicios - ELE505 - Parte1 PDFSara Henderson100% (1)
- Respostas dos Exercícios – Capítulo 5Document15 pagesRespostas dos Exercícios – Capítulo 5Celso CiamponiNo ratings yet
- U1S1 - Valor PU - SEPDocument17 pagesU1S1 - Valor PU - SEPCelso CiamponiNo ratings yet
- U1 - S0 - Apresentação Curso SEP IIDocument17 pagesU1 - S0 - Apresentação Curso SEP IICelso CiamponiNo ratings yet
- U1S1 - Introdução Fluxo de CargaDocument13 pagesU1S1 - Introdução Fluxo de CargaCelso CiamponiNo ratings yet
- Fluxo de Potência Linearizado SoluçõesDocument19 pagesFluxo de Potência Linearizado SoluçõesCelso Ciamponi100% (1)
- U2s1 - Ceme - R1Document36 pagesU2s1 - Ceme - R1Celso CiamponiNo ratings yet
- DEE624 - Projeto de instalações elétricas residenciaisDocument8 pagesDEE624 - Projeto de instalações elétricas residenciaisAdriano J. P. NascimentoNo ratings yet
- Referência Rápida Parâmetros Alarmes Falhas ConfiguraçõesDocument18 pagesReferência Rápida Parâmetros Alarmes Falhas ConfiguraçõesDino Oliveira75% (4)
- Exercícios de RadioatividadeDocument16 pagesExercícios de RadioatividadeClaudevan BassNo ratings yet
- Deângelo Ferreira Atividades+discursivaDocument3 pagesDeângelo Ferreira Atividades+discursivaMauroCorsiNo ratings yet
- MH-Serie de Exercicios PDFDocument29 pagesMH-Serie de Exercicios PDFcleytonco2211No ratings yet
- Relatorio de EletrotecnicaDocument5 pagesRelatorio de EletrotecnicaAnderson JardelNo ratings yet
- Ef11 em Doss Prof d1 Ficha Trab 1 ResolucaoDocument8 pagesEf11 em Doss Prof d1 Ficha Trab 1 Resolucaodfghjk100% (1)
- Forças Newtonianas em Lista de Exercícios de Física IDocument7 pagesForças Newtonianas em Lista de Exercícios de Física IPedro SouzaNo ratings yet
- MIT InduçãoDocument37 pagesMIT InduçãoDircSoarNo ratings yet
- Lei de Coulomb - exercícios sobre força entre cargas elétricasDocument4 pagesLei de Coulomb - exercícios sobre força entre cargas elétricasjose miranda100% (1)
- Ficha-11 - FQ11 CíntiaDocument9 pagesFicha-11 - FQ11 CíntiaRodrigo GomesNo ratings yet
- EletrostáticaDocument13 pagesEletrostáticaDyonny AraujoNo ratings yet
- AL1.1. Física - Guia - Prof - Exploracao PDFDocument6 pagesAL1.1. Física - Guia - Prof - Exploracao PDFNicolaNo ratings yet
- WEG cfw700 Manual de Programacao 10000796176 2.0x Manual Portugues BRDocument287 pagesWEG cfw700 Manual de Programacao 10000796176 2.0x Manual Portugues BRLeandro Vial100% (3)
- Eletromagnetismo no IFRN ParnamirimDocument26 pagesEletromagnetismo no IFRN ParnamirimJean Carlos GaldinoNo ratings yet
- Avaliação 1Document29 pagesAvaliação 1Daniel Silva De Oliveira100% (1)
- Exer Mcu3Document4 pagesExer Mcu3Diomerson DalloNo ratings yet
- Fichamento MecgeralDocument34 pagesFichamento MecgeralRodrigo Mota0% (1)
- EletricidadeDocument82 pagesEletricidadepaesalex100% (2)
- Apostila PDFDocument40 pagesApostila PDFDavid Tanamura TanamuraNo ratings yet
- Capítulo 3 - Fluxo de PotênciaDocument16 pagesCapítulo 3 - Fluxo de PotênciaLayse MascarenhasNo ratings yet
- Medição e Tarifação em Sistemas Elétricos com Cargas Não-LinearesDocument9 pagesMedição e Tarifação em Sistemas Elétricos com Cargas Não-LinearesAnderson PereiraNo ratings yet
- Energia e Movimento CircularDocument6 pagesEnergia e Movimento CircularFeilipeNo ratings yet
- FQA 11o Ano - Resolução de exercíciosDocument2 pagesFQA 11o Ano - Resolução de exercíciosRafaela FerreiraNo ratings yet
- Ap 04 Mruv Cap Ufrr 2018Document9 pagesAp 04 Mruv Cap Ufrr 2018Ronaldo Da Costa CunhaNo ratings yet
- Resoluções dos exercícios de eletrização e força elétricaDocument115 pagesResoluções dos exercícios de eletrização e força elétricaRenan de Souza SantosNo ratings yet
- 08 Conservacao Da EnergiaDocument29 pages08 Conservacao Da EnergiaCarlos Alberto Rodrigues GouveiaNo ratings yet
- Introdução ao EletromagnetismoDocument24 pagesIntrodução ao Eletromagnetismoluc.ayresNo ratings yet
- Acesso de Geração Distribuída ao Sistema da CopelDocument101 pagesAcesso de Geração Distribuída ao Sistema da CopelCristiano MtzNo ratings yet
- Lista de Exercicios 6 Fisica 1Document3 pagesLista de Exercicios 6 Fisica 1Maryelen Miyoshi0% (1)