You might also like
- C670Document9 pagesC670Michel Bohorquez50% (2)
- Reaserch MethodDocument27 pagesReaserch MethodtadesseNo ratings yet
- Stata Guide PDFDocument181 pagesStata Guide PDFNNo ratings yet
- Stats - 112 by KuyajovertDocument70 pagesStats - 112 by KuyajovertRaven QuilatonNo ratings yet
- #4 The Impact of Organizational Culture On Corporate PerformanceDocument10 pages#4 The Impact of Organizational Culture On Corporate PerformanceNaol FramNo ratings yet
- 100 Data Visualization Best PracticesDocument13 pages100 Data Visualization Best PracticesMasood SadiqNo ratings yet
- T-test Dependent SamplesDocument11 pagesT-test Dependent SamplesKelly DaanoyNo ratings yet
- Reliability-Based Bridge Assessment Using Risk-Ranking Decision AnalysisDocument9 pagesReliability-Based Bridge Assessment Using Risk-Ranking Decision AnalysissalmanNo ratings yet
- S Case 4. The Llucluation Is Pulse To Pulse According To Eq. (2.39b)Document2 pagesS Case 4. The Llucluation Is Pulse To Pulse According To Eq. (2.39b)SugunaNo ratings yet
- 3D Seismic Survey DesignDocument10 pages3D Seismic Survey DesignMahmood KhanNo ratings yet
- Experiment 1 Statistical Counting of Cosmic RaysDocument3 pagesExperiment 1 Statistical Counting of Cosmic RaysYipeng NiuNo ratings yet
- Jitter Info Maxim AN377Document6 pagesJitter Info Maxim AN377robert07480No ratings yet
- Backscatter and Seabed Image ReflectivityDocument5 pagesBackscatter and Seabed Image ReflectivityJuan David SantanaNo ratings yet
- Gain of Electromagnetic: HornsDocument3 pagesGain of Electromagnetic: Hornsmurthy tataNo ratings yet
- Budinger 1983Document6 pagesBudinger 1983Merve CinoğluNo ratings yet
- Em Technical Note Web BackscatteringseabedimagereflectivityDocument5 pagesEm Technical Note Web BackscatteringseabedimagereflectivityAdam Budi NugrohoNo ratings yet
- Predicting Non LINEAR dISTORTIONDocument10 pagesPredicting Non LINEAR dISTORTIONKandu SahibNo ratings yet
- RxQual and DTXDocument5 pagesRxQual and DTXdarshanmadeNo ratings yet
- 5offtakes FDocument1 page5offtakes FPooya ShayestehNo ratings yet
- Paper 25 PDFDocument1 pagePaper 25 PDFking kjNo ratings yet
- Some Simple Methods For Refining Permeability Estimates From NMR Logs and Generating Capillary Pressure CurvesDocument8 pagesSome Simple Methods For Refining Permeability Estimates From NMR Logs and Generating Capillary Pressure Curvesari_siNo ratings yet
- IEEE Transactions on Communications, Vol. 45, No. 1, January 1997Document4 pagesIEEE Transactions on Communications, Vol. 45, No. 1, January 1997qi miNo ratings yet
- The Care and Feeding of Digital, Pulse-Shaping Filters: Mixed SignalDocument12 pagesThe Care and Feeding of Digital, Pulse-Shaping Filters: Mixed SignalIzma IznizaNo ratings yet
- Ren VLSI07Document2 pagesRen VLSI07jainarayanNo ratings yet
- Icwe 2023Document4 pagesIcwe 2023Mattia Fabrizio CiarlataniNo ratings yet
- True Time Delays and Phase ShiftersDocument3 pagesTrue Time Delays and Phase ShiftersFernando ShadowNo ratings yet
- Simulation of Transients With A Modal-DomainDocument8 pagesSimulation of Transients With A Modal-DomainRiyadh ZakiNo ratings yet
- Baseline Params Table 2018 68pcDocument343 pagesBaseline Params Table 2018 68pcAkino AskNo ratings yet
- ADC SNR Performance by Kolsrud PDFDocument37 pagesADC SNR Performance by Kolsrud PDFTuyen DinhNo ratings yet
- Digital Communication - Lecture05 - v2Document46 pagesDigital Communication - Lecture05 - v2Saanim MahmoodNo ratings yet
- Estimation of Total Jitter and Jitter Probability Density Function From The Signal SpectrumDocument7 pagesEstimation of Total Jitter and Jitter Probability Density Function From The Signal Spectrumgeodinger9316No ratings yet
- Theory of Optimum Taper For Distortionless Pulse TransmissionDocument11 pagesTheory of Optimum Taper For Distortionless Pulse TransmissionAnirban KanungoeNo ratings yet
- A New Approach Transformer Ground Differential: FOR ProtectionDocument15 pagesA New Approach Transformer Ground Differential: FOR ProtectionproteccionesNo ratings yet
- Weak-Noise Modulation-Estimation of Vector ParametersDocument9 pagesWeak-Noise Modulation-Estimation of Vector ParametersbeaurNo ratings yet
- Transition DensityDocument3 pagesTransition DensitySeongwha HongNo ratings yet
- Politeknik Dergisi Journal of Polytechnic Cilt: 5 Sayı: 2 S. 129-136, 2002 Vol: 5 No: 2 Pp. 129-136, 2002Document9 pagesPoliteknik Dergisi Journal of Polytechnic Cilt: 5 Sayı: 2 S. 129-136, 2002 Vol: 5 No: 2 Pp. 129-136, 2002johneurickNo ratings yet
- Optimizing Physical Layer Energy Con Sump Tin For Wireless Sensor NetworksDocument4 pagesOptimizing Physical Layer Energy Con Sump Tin For Wireless Sensor NetworksAhmed Al ShanttiNo ratings yet
- (1967) Digital Pulse Compression Radar ReceiverDocument9 pages(1967) Digital Pulse Compression Radar ReceiverAlex YangNo ratings yet
- A Simple Method For On-Chip, Sub-Femto Farad Interconnect Capacitance MeasurementDocument3 pagesA Simple Method For On-Chip, Sub-Femto Farad Interconnect Capacitance MeasurementAlex WongNo ratings yet
- Holland 1993Document4 pagesHolland 1993Qian liNo ratings yet
- Receiver Sensitivity / NoiseDocument9 pagesReceiver Sensitivity / NoiseThiyagu MohanNo ratings yet
- Predict Resonances of Shielded PCBsDocument8 pagesPredict Resonances of Shielded PCBskhanafzaal2576No ratings yet
- Synchronizing Renewable Energy Sources in Distributed Generation SystemsDocument5 pagesSynchronizing Renewable Energy Sources in Distributed Generation SystemsRehan AshrafNo ratings yet
- Design Considerations For Direct RF Sampling Receiver in Gnss EnvironmentDocument6 pagesDesign Considerations For Direct RF Sampling Receiver in Gnss Environmenttrilokdhal962No ratings yet
- University of Manchester School of Computer Science CS3282: Digital Communications '06 Section 9: Multi-Level Digital Modulation & DemodulationDocument10 pagesUniversity of Manchester School of Computer Science CS3282: Digital Communications '06 Section 9: Multi-Level Digital Modulation & DemodulationSridhar BolliNo ratings yet
- Cramer Round RaoDocument8 pagesCramer Round RaoJj KumarNo ratings yet
- Optimum Power Allocation For Fading Relay Channels: Muhammad Mehboob Fareed and Murat UysalDocument5 pagesOptimum Power Allocation For Fading Relay Channels: Muhammad Mehboob Fareed and Murat UysalballmerNo ratings yet
- High SNR Analysis For MIMO Broadcast Channels: Dirty Paper Coding vs. Linear PrecodingDocument33 pagesHigh SNR Analysis For MIMO Broadcast Channels: Dirty Paper Coding vs. Linear Precodingkumaar1943No ratings yet
- Upper and Lower Bound On Signal-to-Noise Ratio Gains For Cooperative Relay NetworksDocument5 pagesUpper and Lower Bound On Signal-to-Noise Ratio Gains For Cooperative Relay NetworksMosabNo ratings yet
- Noise in Fiber Optic Communication LinksDocument14 pagesNoise in Fiber Optic Communication Linksian.maximillianNo ratings yet
- DRM OLTC CASE STUDY V01aDocument7 pagesDRM OLTC CASE STUDY V01adani0001414No ratings yet
- SNLO HelpDocument11 pagesSNLO Helpaakash777No ratings yet
- Broad - Band Well TieDocument5 pagesBroad - Band Well Tiemag_iaNo ratings yet
- Estiamando ZetaDocument6 pagesEstiamando ZetaGabriel AguirreNo ratings yet
- Review Article Radio Frequency Coil Technology For Small-Animal MRIDocument22 pagesReview Article Radio Frequency Coil Technology For Small-Animal MRIMarcelo PirizNo ratings yet
- Hui - Chopping in DSM - 2017Document4 pagesHui - Chopping in DSM - 2017Saleh Heidary ShalmanyNo ratings yet
- Design Note DN018: Range Measurements in An Open Field EnvironmentDocument15 pagesDesign Note DN018: Range Measurements in An Open Field Environmentazlin_ghazaliNo ratings yet
- Practical Application of the Soft Soil Creep Model - Determining Model Parameters from Oedometer TestsDocument1 pagePractical Application of the Soft Soil Creep Model - Determining Model Parameters from Oedometer TestsBookAncestorNo ratings yet
- SNR orDocument5 pagesSNR orSarvjit SinghNo ratings yet
- EUSPEN2018 Metrologie WavefrontInterferometerDocument1 pageEUSPEN2018 Metrologie WavefrontInterferometerJOBERTNo ratings yet
- 02XXX WTP 001 A PDFDocument11 pages02XXX WTP 001 A PDFdewiyustianingsihNo ratings yet
- Random Vibration Analysis - Nastran SOL 111 - Aerospace EngineeringDocument13 pagesRandom Vibration Analysis - Nastran SOL 111 - Aerospace Engineeringejzuppelli8036No ratings yet
- Mahmoudi Et Al. 2004Document11 pagesMahmoudi Et Al. 2004walidfouedmahmoudiNo ratings yet
- Modeling Baseband SignalsDocument21 pagesModeling Baseband SignalsAhmed Musa AlShormanNo ratings yet
- SD PDFDocument7 pagesSD PDFTech To BarNo ratings yet
- Review On Power Swing Blocking TechniquesDocument6 pagesReview On Power Swing Blocking TechniquesaiswaryaNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Ahmed Jqte 2016Document10 pagesAhmed Jqte 2016Nick AmNo ratings yet
- Ahmed JSSC Dec 2017 PDFDocument13 pagesAhmed JSSC Dec 2017 PDFNick AmNo ratings yet
- A 19.6-Gbps CMOS Optical Receiver With Local Feedback IIR DFEDocument2 pagesA 19.6-Gbps CMOS Optical Receiver With Local Feedback IIR DFENick AmNo ratings yet
- An607 PDFDocument6 pagesAn607 PDFMehul ShahNo ratings yet
- The Varieties of Homicide and Its ResearchDocument265 pagesThe Varieties of Homicide and Its Researchapi-183104935No ratings yet
- Distribution Tables: Standard Normal (Z) TableDocument13 pagesDistribution Tables: Standard Normal (Z) TableYeNti Bastaman KusumadewaNo ratings yet
- Mathematics 8 Analytic Rubric - Statistics and Probability Criteria Excellent 4 Very Good 3 Good 2 Needs Improvement 1Document2 pagesMathematics 8 Analytic Rubric - Statistics and Probability Criteria Excellent 4 Very Good 3 Good 2 Needs Improvement 1Melissa LouiseNo ratings yet
- Quiz 6: CS 436/536: Introduction To Machine LearningDocument2 pagesQuiz 6: CS 436/536: Introduction To Machine LearningKarishma JaniNo ratings yet
- Calculating Standard DeviationDocument2 pagesCalculating Standard Deviationamar sharmaNo ratings yet
- Relationship Between Consumer Characteristics and Impulse Buying Behavior - The Mediating Role of Buying Intention of New Clothing Buyers (#355400) - 367047 PDFDocument8 pagesRelationship Between Consumer Characteristics and Impulse Buying Behavior - The Mediating Role of Buying Intention of New Clothing Buyers (#355400) - 367047 PDFramNo ratings yet
- Predicting Pavement Condition Index Using International Roughness Index in A Dense Urban AreaDocument8 pagesPredicting Pavement Condition Index Using International Roughness Index in A Dense Urban AreakeerthyNo ratings yet
- Lesson 4Document28 pagesLesson 4mmaw25009No ratings yet
- Literature Review On Instructional SupervisionDocument4 pagesLiterature Review On Instructional Supervisionc5p0cd99100% (1)
- Principles of Pressure UlcerDocument13 pagesPrinciples of Pressure UlcerAmalina Elvira Anggraini100% (1)
- Probability DistributionDocument14 pagesProbability DistributionAditi Gupta SinghNo ratings yet
- 1 ForecastingDocument62 pages1 Forecastingap.adityaNo ratings yet
- A Study On Guidance Needs Among Higher Secondary StudentsDocument4 pagesA Study On Guidance Needs Among Higher Secondary StudentsIOSRjournalNo ratings yet
- Unit 3 2DRVDocument82 pagesUnit 3 2DRVshubham raj laxmiNo ratings yet
- Bachelor in Rehabilitation Therapy CRC SyllabusDocument70 pagesBachelor in Rehabilitation Therapy CRC SyllabusHaseeb67% (3)
- Cumulative Risk Profile for Number of Tails in 3 Coin TossesDocument3 pagesCumulative Risk Profile for Number of Tails in 3 Coin Tosseszainab alshatterNo ratings yet
- The Effect of Product Quality and Price On Purchase Decisions in Sourfelly Custom Cakery, West JakartaDocument14 pagesThe Effect of Product Quality and Price On Purchase Decisions in Sourfelly Custom Cakery, West JakartadiditNo ratings yet
- Humastar 600: - User ManualDocument150 pagesHumastar 600: - User ManualHoang le MinhNo ratings yet
- PHCL 612: Logistic Regression Course NotesDocument23 pagesPHCL 612: Logistic Regression Course NotesHOD ODNo ratings yet
- Project PresentationDocument18 pagesProject PresentationYasaswiniNo ratings yet
- Agri-Business Perceptual MapDocument11 pagesAgri-Business Perceptual Map055ANAMIKA GUPTANo ratings yet
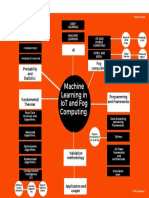
- Machine Learning in IoTDocument1 pageMachine Learning in IoTmkiadi2002No ratings yet