You might also like
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Obd 2Document43 pagesObd 2Hector Guioassif Moreira Sossa100% (2)
- Obd 2Document43 pagesObd 2Hector Guioassif Moreira Sossa100% (2)
- SGSM 2000 SGCM 2000 TraducidoDocument124 pagesSGSM 2000 SGCM 2000 TraducidoTeo Villar Ramirez100% (5)
- Bienvenidos al curso de habilitación del Boeing 737Document121 pagesBienvenidos al curso de habilitación del Boeing 737trotamundos1974100% (1)
- La Ingeniería Concurrente Es Un Esfuerzo Sistemático para Un Diseño IntegradoDocument6 pagesLa Ingeniería Concurrente Es Un Esfuerzo Sistemático para Un Diseño IntegradoHector Guioassif Moreira SossaNo ratings yet
- Guía Práctica de Dispositivos de Energía Libre PDFDocument18 pagesGuía Práctica de Dispositivos de Energía Libre PDFcarloscruzrinconNo ratings yet
- FO - Operador de Grúa HorquillaDocument2 pagesFO - Operador de Grúa HorquillaEl Deté Adidas-Group ChileNo ratings yet
- Robot Seguidor Resuelve LaberintosDocument6 pagesRobot Seguidor Resuelve LaberintosChristian QuindeNo ratings yet
- Diagrama ElectricoDocument44 pagesDiagrama ElectricoFranko Salas75% (4)
- 2.3.7 Procedimiento para La Recolección de DatosDocument32 pages2.3.7 Procedimiento para La Recolección de DatosAntonyExonDelgadoClavoNo ratings yet
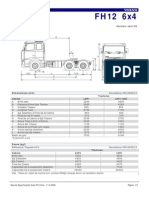
- FH12 6x4 especificacionesDocument5 pagesFH12 6x4 especificacionesEdward LeónNo ratings yet
- Brazo RoboticoDocument14 pagesBrazo RoboticolordarcanoNo ratings yet
- Paso4 - Grupo36 - MicroprocesadoresDocument18 pagesPaso4 - Grupo36 - MicroprocesadoresEdwin Jimenez100% (1)
- Datos Tecnicos Camion de Basura CompactadorDocument10 pagesDatos Tecnicos Camion de Basura CompactadorHector Guioassif Moreira Sossa0% (2)
- Influencia de Los Aleantes en Los AcerosDocument5 pagesInfluencia de Los Aleantes en Los AcerosHector Guioassif Moreira SossaNo ratings yet
- Robot Seguidor Resuelve LaberintosDocument9 pagesRobot Seguidor Resuelve LaberintosAlejandro RojasNo ratings yet
- 3° Decibel Explicacion Completa Mas Formula de CalculoDocument5 pages3° Decibel Explicacion Completa Mas Formula de CalculoarcontmeNo ratings yet
- Como Hacer Un Encoder Óptico Usando Partes de Un Mouse MecánicoDocument11 pagesComo Hacer Un Encoder Óptico Usando Partes de Un Mouse Mecánicotecniloco80No ratings yet
- Control de movimiento: encoders vs resolversDocument10 pagesControl de movimiento: encoders vs resolversJorge Tamayo MancillaNo ratings yet
- Teoria de ControlDocument16 pagesTeoria de ControlNaye Quezada RíosNo ratings yet
- Informe Encoder Optico 1Document8 pagesInforme Encoder Optico 1Gustavo QuicaliquinNo ratings yet
- Control 2D Helicopter PID RobustDocument6 pagesControl 2D Helicopter PID RobustEmanuel Arcos CoronelNo ratings yet
- Robot volador controlDocument8 pagesRobot volador controlRaul Arturo Samaniego TelloNo ratings yet
- Capítulo 2Document13 pagesCapítulo 2ptinizarayNo ratings yet
- Robot Detector de Obstáculos HC-SR04Document28 pagesRobot Detector de Obstáculos HC-SR04perickunib1No ratings yet
- Brazo RoboticoDocument160 pagesBrazo Roboticosueli ramosNo ratings yet
- Manual de Montaje y Configuración de Multirrotores Con Autopiloto APMDocument34 pagesManual de Montaje y Configuración de Multirrotores Con Autopiloto APMJohn PerezNo ratings yet
- Control de Brazo Robótico de 5 Grados de LibertadDocument15 pagesControl de Brazo Robótico de 5 Grados de LibertadVictor CondoriNo ratings yet
- ¿Como Funciona?Document17 pages¿Como Funciona?Juan Eduardo GivovichNo ratings yet
- Seguidor de LineaDocument11 pagesSeguidor de LineaCristian YánezNo ratings yet
- Ball and Beam SystemDocument18 pagesBall and Beam SystemJafet MartinezNo ratings yet
- Paso 3Document11 pagesPaso 3Jimmy francoNo ratings yet
- TAREA07Document9 pagesTAREA07gonzalo lopezNo ratings yet
- Control ServoDocument16 pagesControl ServoJULIET MUNOZ GARCIANo ratings yet
- Ensayo Construccion de Un Robot MovilDocument9 pagesEnsayo Construccion de Un Robot MovilAndre LoeraNo ratings yet
- Reporte Robot CopaDocument22 pagesReporte Robot CopanekokanamealexisNo ratings yet
- Balancing RobotDocument5 pagesBalancing RobotPaulcrzNo ratings yet
- Control de VelocidadDocument10 pagesControl de VelocidadSonia Anabel JaquezNo ratings yet
- Sistema de Control - (Carrito Seguidor de Linea)Document16 pagesSistema de Control - (Carrito Seguidor de Linea)Ronaldo MendietaNo ratings yet
- Ex Amen Practica Subir Encoder IncrementalDocument13 pagesEx Amen Practica Subir Encoder IncrementalWilliam WilliamsNo ratings yet
- PlanDocument42 pagesPlanJessica RossNo ratings yet
- Robot SumoDocument10 pagesRobot Sumojose.cerrograndeNo ratings yet
- Imágenes de TeoríaDocument37 pagesImágenes de TeoríarubiohotNo ratings yet
- Sistema de Seguimiento de Trayectoria de Un VehiculoDocument5 pagesSistema de Seguimiento de Trayectoria de Un VehiculoRicardo SolorzanoNo ratings yet
- Proyecto Chasis 2wd A Adaptación Arduino (Recuperado Automáticamente)Document24 pagesProyecto Chasis 2wd A Adaptación Arduino (Recuperado Automáticamente)jhoanNo ratings yet
- Carro Evita ObstaculosDocument5 pagesCarro Evita ObstaculosGemy Carolina Zam VidalNo ratings yet
- Proyecto Electronica DigitalDocument21 pagesProyecto Electronica DigitalCarlos Godinez MartinezNo ratings yet
- Control de Un Péndulo de FurutaDocument39 pagesControl de Un Péndulo de FurutaAnonymous TKYjaClZNo ratings yet
- Vehículo A Control RemotoDocument12 pagesVehículo A Control RemotoElvisNo ratings yet
- Módulo ProyectosDocument5 pagesMódulo ProyectosAydee Lizeth Mamani DonaireNo ratings yet
- Compus FinalDocument8 pagesCompus FinalPedro JerexNo ratings yet
- Proyecto Manual de Usuario Carro Seguidor de LineaDocument41 pagesProyecto Manual de Usuario Carro Seguidor de Lineajose medina100% (1)
- Modelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Document6 pagesModelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Cristhian CasarrubiasNo ratings yet
- Medición de velocidad y posición con tacómetros y enconderesDocument2 pagesMedición de velocidad y posición con tacómetros y enconderesCristian CachiguangoNo ratings yet
- Mediciones del MPU6050 con ArduinoDocument6 pagesMediciones del MPU6050 con ArduinoLuis Eduardo AndradeNo ratings yet
- Presentación Sx4Document15 pagesPresentación Sx4Felix LopezNo ratings yet
- Avance de Carro Seguidor de Línea Con ArduinoDocument8 pagesAvance de Carro Seguidor de Línea Con ArduinoDario MayancelaNo ratings yet
- Electronicafinal PDFDocument9 pagesElectronicafinal PDFA L E X0% (1)
- Drone ExploradorDocument11 pagesDrone ExploradorBernard Surita PlacenciaNo ratings yet
- Robot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Document25 pagesRobot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Byron Pinguil SánchezNo ratings yet
- Informe Encoder Alcoser AldanaDocument6 pagesInforme Encoder Alcoser AldanaEfra AlcoserNo ratings yet
- Proyecto de control de equilibrio y seguimiento de líneaDocument17 pagesProyecto de control de equilibrio y seguimiento de líneaDario OviedoNo ratings yet
- Tarea Final Segundo Parcial-AriasDocument13 pagesTarea Final Segundo Parcial-AriasStalin AriasNo ratings yet
- Anexo I Informe de Proyecto Final - ULISES ROMAN MURILLODocument13 pagesAnexo I Informe de Proyecto Final - ULISES ROMAN MURILLOUlises Román MurilloNo ratings yet
- ITA 8.3, MVVV, Tarea 4, Parcial 2 ServomotorDocument8 pagesITA 8.3, MVVV, Tarea 4, Parcial 2 ServomotorMarco Viera ValadezNo ratings yet
- Proyecto Carro UltrasonicoDocument8 pagesProyecto Carro UltrasonicoRoger SarangoNo ratings yet
- TFG Omar Estalin Alarcon BalsecaDocument62 pagesTFG Omar Estalin Alarcon BalsecaSergio Cayetano PalaciosNo ratings yet
- Control de Servomotor Usando dsPIC Con Controlador PIDDocument15 pagesControl de Servomotor Usando dsPIC Con Controlador PIDRicardo NietoNo ratings yet
- SegwayDocument7 pagesSegwayScott MelgarejoNo ratings yet
- Pract2 DSMDocument9 pagesPract2 DSMMiguel SalasNo ratings yet
- Seguidor de LineaDocument15 pagesSeguidor de LineaNicole AlemánNo ratings yet
- Curvas de Soportabilidad Termica de ConductoresDocument2 pagesCurvas de Soportabilidad Termica de ConductoresHector Guioassif Moreira SossaNo ratings yet
- AleantesDocument2 pagesAleantesHector Guioassif Moreira SossaNo ratings yet
- EstructurasDocument3 pagesEstructurasHector Guioassif Moreira SossaNo ratings yet
- Lobo 3.3Document6 pagesLobo 3.3Hector Guioassif Moreira SossaNo ratings yet
- EstructurasDocument3 pagesEstructurasHector Guioassif Moreira SossaNo ratings yet
- Lobo 3.3Document6 pagesLobo 3.3Hector Guioassif Moreira SossaNo ratings yet
- PRIMER PARCIAL-VERANO 2018-EJERCICIOS DE EQUILIBRIO, MASA EQUIVALENTE, MOVIMIENTO Y VIBRACIONESDocument2 pagesPRIMER PARCIAL-VERANO 2018-EJERCICIOS DE EQUILIBRIO, MASA EQUIVALENTE, MOVIMIENTO Y VIBRACIONESHector Guioassif Moreira SossaNo ratings yet
- MetalesDocument4 pagesMetalesHector Guioassif Moreira SossaNo ratings yet
- Compresores RotativosDocument7 pagesCompresores RotativosHector Guioassif Moreira SossaNo ratings yet
- Mujer EmprendedoraDocument2 pagesMujer EmprendedoraHector Guioassif Moreira SossaNo ratings yet
- Calculo Matriz de RigidezDocument14 pagesCalculo Matriz de RigidezHector Guioassif Moreira Sossa100% (1)
- Auto CadDocument3 pagesAuto CadHector Guioassif Moreira SossaNo ratings yet
- Motores Neumaticos de PaletasDocument2 pagesMotores Neumaticos de PaletasHector Guioassif Moreira SossaNo ratings yet
- Tipos de Válvulas de Compresión ReciprocantesDocument4 pagesTipos de Válvulas de Compresión ReciprocantesHector Guioassif Moreira SossaNo ratings yet
- Capitulo 3Document35 pagesCapitulo 3Hector Guioassif Moreira SossaNo ratings yet
- Informe 5Document12 pagesInforme 5Hector Guioassif Moreira SossaNo ratings yet
- FluidDocument2 pagesFluidHector Guioassif Moreira SossaNo ratings yet
- Ejercicios CiclosDocument2 pagesEjercicios CiclosHector Guioassif Moreira SossaNo ratings yet
- Cinematic A de Mecanismos VelocidadesDocument15 pagesCinematic A de Mecanismos VelocidadesJota Jota DNo ratings yet
- Fecha Tecnica MotoresDocument2 pagesFecha Tecnica MotoresHector Guioassif Moreira SossaNo ratings yet
- Ejercicio FisicaDocument2 pagesEjercicio FisicaHector Guioassif Moreira SossaNo ratings yet
- Instrucciones para Diseño de MatricesDocument2 pagesInstrucciones para Diseño de MatricesAlejandro Saravia AlcócerNo ratings yet
- Telurómetro MegabrasDocument2 pagesTelurómetro Megabraswilmanzito100% (1)
- Arrancador Stanley PDFDocument8 pagesArrancador Stanley PDFMiguel Angel Herrera AguilarNo ratings yet
- Baterías para SubmarinosDocument60 pagesBaterías para SubmarinosAizak Ocelocoatl McClaine GómezNo ratings yet
- Instalación Eléctrica de Un Centro de CómputoDocument3 pagesInstalación Eléctrica de Un Centro de CómputoGerardo Angeles Pérez50% (2)
- Manual Estación Meteorológica PDFDocument2 pagesManual Estación Meteorológica PDFRoncato Esfera100% (1)
- Proyectos Electronicos PDFDocument141 pagesProyectos Electronicos PDFBruno SilvaNo ratings yet
- M DicopelDocument14 pagesM DicopelLili PachecoNo ratings yet
- Manual de Usuario en Español Del SAI (UPS) Liebert ITADocument28 pagesManual de Usuario en Español Del SAI (UPS) Liebert ITAPablo Andres Achá Serrano100% (2)
- Atlas Copco Generadores SSSI PDFDocument32 pagesAtlas Copco Generadores SSSI PDFJuan Contreras PinedaNo ratings yet
- Generic Gt-p7510 Galaxy Tab 10-1 Spanish User ManualDocument145 pagesGeneric Gt-p7510 Galaxy Tab 10-1 Spanish User ManuallizzardkinNo ratings yet
- Aislamiento en Máquinas EléctricasDocument24 pagesAislamiento en Máquinas EléctricasJon BrownNo ratings yet
- Electroterapia Magnetoterapia TensDocument11 pagesElectroterapia Magnetoterapia TensJúlio ZoéNo ratings yet
- Manual de Electronic A Fabricar Un Cargador de BateriasDocument10 pagesManual de Electronic A Fabricar Un Cargador de BateriasMauricio Caro Navarro100% (1)
- Principios de La ElectrolisisDocument11 pagesPrincipios de La ElectrolisisJose García HerreroNo ratings yet
- Manual Camara Samsung ST30 Español-MexicoDocument102 pagesManual Camara Samsung ST30 Español-MexicoclaudiojosefoNo ratings yet
- Gpo Electrogeno Manual Generating Set Manual 2k15Document68 pagesGpo Electrogeno Manual Generating Set Manual 2k15Isai SantanaNo ratings yet
- Mecanismos y Circuitos de ControlDocument11 pagesMecanismos y Circuitos de Controlsurvivalsherman4No ratings yet
- ManualDocument58 pagesManualBryan ParkerNo ratings yet
- Celular Nyx 205Document30 pagesCelular Nyx 205Antonio Molina PachecoNo ratings yet
- TesisDocument26 pagesTesisNils AguirreNo ratings yet
- Fabricar Cargador para DELLDocument12 pagesFabricar Cargador para DELLmossettoNo ratings yet
- Manual CR2-12 PlusDocument4 pagesManual CR2-12 PlusEnid MunozNo ratings yet
- Rutinas y Mantenimiento Preventivo, Predictivo y CorrectivoDocument71 pagesRutinas y Mantenimiento Preventivo, Predictivo y CorrectivoQuilian Bermúdez50% (2)