You might also like
- General Application of MEMS Sensors For Land Seismic Acquisition-Is It Time?Document11 pagesGeneral Application of MEMS Sensors For Land Seismic Acquisition-Is It Time?RFNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- MEMS Based Accelerometers: Expectations and Practical AchievementsDocument6 pagesMEMS Based Accelerometers: Expectations and Practical AchievementsramosmanoNo ratings yet
- In-Plane and Out-Of-Plane MEMS Gyroscopes Based On Piezoresistive NEMS DetectionDocument10 pagesIn-Plane and Out-Of-Plane MEMS Gyroscopes Based On Piezoresistive NEMS DetectionshreerangarbrNo ratings yet
- Advances in Magnetic Field Sensors - Pavel Ripka & Michal JanosekDocument9 pagesAdvances in Magnetic Field Sensors - Pavel Ripka & Michal Janoseksamuel SalcedoNo ratings yet
- Acoustic Fiber Sensor ArraysDocument12 pagesAcoustic Fiber Sensor ArraysMale RamìrezNo ratings yet
- Capacitive Versus Thermal MEMS For High-Vibration Applications James FennellyDocument6 pagesCapacitive Versus Thermal MEMS For High-Vibration Applications James FennellyHarman PunnNo ratings yet
- Land 3D: Groups or Single Sensors? Cables or Radio? Geophysical and Operational ConsiderationsDocument5 pagesLand 3D: Groups or Single Sensors? Cables or Radio? Geophysical and Operational Considerationsghassen laouiniNo ratings yet
- MEMS Magnetic Field Sensor - WikipediaDocument5 pagesMEMS Magnetic Field Sensor - WikipediaHyan GontijoNo ratings yet
- Smart Dust: Communicating With A Cubic-Millimeter ComputerDocument36 pagesSmart Dust: Communicating With A Cubic-Millimeter ComputerKaustav BhattacharyaNo ratings yet
- Background Basic Idea Technologies Used Current Scenario Future Prospects ConclusionDocument34 pagesBackground Basic Idea Technologies Used Current Scenario Future Prospects ConclusionKaustav BhattacharyaNo ratings yet
- A Novel Technique For Advanced Ultrasonic Testing of Concrete by Using Signal Conditioning Methods and A Scanning Laser VibrometerDocument5 pagesA Novel Technique For Advanced Ultrasonic Testing of Concrete by Using Signal Conditioning Methods and A Scanning Laser VibrometersrgokuNo ratings yet
- Analog Processing Based Vibration Measurement Technique Using Michelson InterferometerDocument7 pagesAnalog Processing Based Vibration Measurement Technique Using Michelson Interferometeraufi wowoNo ratings yet
- Registration ReportDocument21 pagesRegistration ReportMd Zia KhurshidNo ratings yet
- A Self Servo Writing Scheme For A MEMS Storage Device With Sub-Nanometer PrecisionDocument6 pagesA Self Servo Writing Scheme For A MEMS Storage Device With Sub-Nanometer Precisionvsc2012No ratings yet
- Wideband Multiprobe Microwave Multimeter: Vladimir M. Volkov, B. ZaichenkoDocument3 pagesWideband Multiprobe Microwave Multimeter: Vladimir M. Volkov, B. ZaichenkoArif HurairahNo ratings yet
- FBG Application: Fiber Bragg Grating SensorsDocument4 pagesFBG Application: Fiber Bragg Grating SensorssumantanwarNo ratings yet
- هاجر رعد PDFDocument7 pagesهاجر رعد PDFHajar RaadNo ratings yet
- MEMS Accelerometers: Testing and Practical Approach For Smart Sensing and Machinery DiagnosticsDocument23 pagesMEMS Accelerometers: Testing and Practical Approach For Smart Sensing and Machinery DiagnosticsRafael Lemanski Dos SantosNo ratings yet
- Control and Signal Processing For Time Stretched Photonic ADCDocument3 pagesControl and Signal Processing For Time Stretched Photonic ADCHariNathNo ratings yet
- Low Noise Vacuum Mems Closed-Loop Accelerometer Using Sixth-Order Multi-Feedback Loops and Local Resonator Sigma Delta ModulatorDocument4 pagesLow Noise Vacuum Mems Closed-Loop Accelerometer Using Sixth-Order Multi-Feedback Loops and Local Resonator Sigma Delta ModulatorMadhu JbNo ratings yet
- Vibrating RF Mems: AbstractDocument9 pagesVibrating RF Mems: AbstractSrini VasuluNo ratings yet
- Micromachined Cmos Magnetic Field Sensors With Low-Noise Signal ConditioningDocument4 pagesMicromachined Cmos Magnetic Field Sensors With Low-Noise Signal ConditioningdenghueiNo ratings yet
- Microwave 1Document37 pagesMicrowave 1Kennedy MutaiNo ratings yet
- Earth: Seismic Signal Processing For Many Years, Seismograms Consisted Only of A Paper Record ofDocument3 pagesEarth: Seismic Signal Processing For Many Years, Seismograms Consisted Only of A Paper Record ofVicky MtsNo ratings yet
- Adaptive MicroantennasDocument8 pagesAdaptive MicroantennasHòa TrầnNo ratings yet
- 1991 - Resonant Sensors and ApplicationsDocument7 pages1991 - Resonant Sensors and Applicationsh3r0n3duNo ratings yet
- Local Readout Enhancement For Detuned Signal-Recycling InterferometersDocument10 pagesLocal Readout Enhancement For Detuned Signal-Recycling InterferometersParampreetWaliaNo ratings yet
- MEMS Capacitive Microphones: Acoustical, Electrical, and Hidden Thermal-Related IssuesDocument9 pagesMEMS Capacitive Microphones: Acoustical, Electrical, and Hidden Thermal-Related IssuessivakumarNo ratings yet
- Ultrasonic Phased ArrayDocument2 pagesUltrasonic Phased ArrayMahade Hasan DipuNo ratings yet
- Unit 3Document14 pagesUnit 3DivyavarshiniNo ratings yet
- Uu 30 2009Document5 pagesUu 30 2009Eka Panji SaptaprasetyaNo ratings yet
- Vibrationsensor 171204042110Document18 pagesVibrationsensor 171204042110DRathikaNo ratings yet
- Abstract - SAW Devices Have Been: AW Ensors For Irect and Emote EasurementDocument9 pagesAbstract - SAW Devices Have Been: AW Ensors For Irect and Emote EasurementDebdeep BanerjeeNo ratings yet
- Jicable DAS For Power Industry Applications 2015-A3-4Document6 pagesJicable DAS For Power Industry Applications 2015-A3-4Richard KluthNo ratings yet
- Wang Design JmemsDocument7 pagesWang Design JmemsbharathNo ratings yet
- An Introduction To MEMS Vibration Monitoring - Analog DevicesDocument16 pagesAn Introduction To MEMS Vibration Monitoring - Analog DevicesVinicios FerrazNo ratings yet
- Doktorandentag 2015 DSDocument1 pageDoktorandentag 2015 DSmansourvcxNo ratings yet
- Версия для печатиDocument6 pagesВерсия для печатиthanhhavdtNo ratings yet
- En - MEMS Condition MonitoringDocument17 pagesEn - MEMS Condition MonitoringbogodavidNo ratings yet
- Instrumentasi Monitoring Gempa & Kualitas Data: Ariska Rudyanto, M.SC, MphilDocument54 pagesInstrumentasi Monitoring Gempa & Kualitas Data: Ariska Rudyanto, M.SC, MphilDodi MartinNo ratings yet
- 1 s2.0 S1877705814023972 MainDocument4 pages1 s2.0 S1877705814023972 Main60158No ratings yet
- 2021IEEE57n2a5300305 - Development of A Broad Bandwidth Helmholtz Coil For Biomagnetic ApplicationDocument5 pages2021IEEE57n2a5300305 - Development of A Broad Bandwidth Helmholtz Coil For Biomagnetic Applicationf111142151No ratings yet
- Wireless Sensor Networks in Geophysics - Sageep Paper FinalDocument9 pagesWireless Sensor Networks in Geophysics - Sageep Paper FinalCharles OdenNo ratings yet
- Application in Mobile CommDocument4 pagesApplication in Mobile CommAnandita MalikNo ratings yet
- FGM Fluxgate Magnetic Field Sensor Specifications Applications GuideDocument23 pagesFGM Fluxgate Magnetic Field Sensor Specifications Applications GuideenNo ratings yet
- High Resolution Common Depth Pointseismicreflection InstrumentationDocument7 pagesHigh Resolution Common Depth Pointseismicreflection InstrumentationKhamvanh PhengnaoneNo ratings yet
- TCH05 Inertial SensorsDocument15 pagesTCH05 Inertial SensorsNikhilAgnihotriNo ratings yet
- Paper Velocimeter SPIE RS07Document12 pagesPaper Velocimeter SPIE RS07Mounika ReddyNo ratings yet
- Minor ProjectDocument27 pagesMinor ProjectAnany SharmaNo ratings yet
- A MEMS Ultrasonic Transducer For Monitoring of Steel StructuresDocument9 pagesA MEMS Ultrasonic Transducer For Monitoring of Steel StructuresJacqueline DidierNo ratings yet
- This Item Is The Archived Peer-Reviewed Author-Version ofDocument4 pagesThis Item Is The Archived Peer-Reviewed Author-Version ofRahul Subramonian BamaNo ratings yet
- 00 Micromechatronic SystemsDocument47 pages00 Micromechatronic SystemscacaNo ratings yet
- Vibration Isolation of Mems Sensors For Aerospace ApplicationsDocument5 pagesVibration Isolation of Mems Sensors For Aerospace ApplicationsPedro SkouNo ratings yet
- For Data Compression and Prediction: Learning in Wireless Sensor NetworksDocument60 pagesFor Data Compression and Prediction: Learning in Wireless Sensor NetworksAugusto BaffaNo ratings yet
- Buff SAW SensorsDocument9 pagesBuff SAW SensorsKo Mya SanNo ratings yet
- A 19.8 MW Eddy Current Displacement Sensor Interface With Sub Nanometer ResolutionDocument13 pagesA 19.8 MW Eddy Current Displacement Sensor Interface With Sub Nanometer ResolutionSiphesihle NkosiNo ratings yet
- Introduction To Optical Communication SystemsDocument15 pagesIntroduction To Optical Communication SystemsMohammed AliNo ratings yet
- TN16 - Sensor Selection GuideDocument13 pagesTN16 - Sensor Selection GuideAsitha KulasekeraNo ratings yet
- I I I I I I: Siffi Tfttrn"FfitrhmffiDocument2 pagesI I I I I I: Siffi Tfttrn"FfitrhmffiAnonymous esM09O2spNo ratings yet
- Respon Struktur Akibat Beban Seismik Pada Gedung Dengan Model Penampang Struktur Kolom Tak SeragamDocument11 pagesRespon Struktur Akibat Beban Seismik Pada Gedung Dengan Model Penampang Struktur Kolom Tak SeragamAnonymous esM09O2spNo ratings yet
- Study On Microtremor Characteristics Based On Simultaneous Measurements Between Basement and Surface Using BoreholeDocument8 pagesStudy On Microtremor Characteristics Based On Simultaneous Measurements Between Basement and Surface Using BoreholeAnonymous esM09O2spNo ratings yet
- Raziskave Resonance Med Tlemi in Stavbami V Bovški Kotlini Z Metodo Mikrotremorjev Soil-Structure Resonance Study in The Bovec Basin Using The Microtremor MethodDocument8 pagesRaziskave Resonance Med Tlemi in Stavbami V Bovški Kotlini Z Metodo Mikrotremorjev Soil-Structure Resonance Study in The Bovec Basin Using The Microtremor MethodAnonymous esM09O2spNo ratings yet
- 511 08 PDFDocument16 pages511 08 PDFAnonymous esM09O2spNo ratings yet
- Struktur Beton BertulangDocument271 pagesStruktur Beton BertulangHarly Bigbang100% (1)
- FT M5 Accesor enDocument4 pagesFT M5 Accesor enjanseta22No ratings yet
- Katalog Single Split Packaged AC 2015-2016 PanasonicDocument32 pagesKatalog Single Split Packaged AC 2015-2016 Panasonicdoris0% (1)
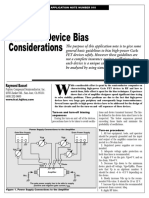
- AN010 Bias Web PubDocument7 pagesAN010 Bias Web PubGs SrikanthNo ratings yet
- HBM QuantumX ManualDocument224 pagesHBM QuantumX ManualFerenc TothNo ratings yet
- Felcom 16 Service Part 1Document75 pagesFelcom 16 Service Part 1emilio gustavo saez duroNo ratings yet
- Manual Call Point - FSM500K PDFDocument2 pagesManual Call Point - FSM500K PDFrhomadona100% (1)
- 12 20267 EN 20 - Envoy - INT DatasheetDocument5 pages12 20267 EN 20 - Envoy - INT DatasheetEventos ElcaNo ratings yet
- Solutions PDFDocument161 pagesSolutions PDFSmriti Rai50% (2)
- Electrical Engineer Fresher Resume PDF DownloadDocument1 pageElectrical Engineer Fresher Resume PDF DownloadMûhämmåd Jûñåîd MúghålNo ratings yet
- 1.1 Detailed Problem Definition: Interactive Voice Response SystemDocument35 pages1.1 Detailed Problem Definition: Interactive Voice Response SystemshruthisirireddyNo ratings yet
- Goals of True Broad Band's Wireless Next Wave (4G-5G) PDFDocument7 pagesGoals of True Broad Band's Wireless Next Wave (4G-5G) PDFLuis Miguel DiazNo ratings yet
- Fairchild Analog CRDocument12 pagesFairchild Analog CRjosetantonioNo ratings yet
- LM 4674Document28 pagesLM 4674Big BoyNo ratings yet
- 745-b5 - 7 Modbus MultilinDocument68 pages745-b5 - 7 Modbus MultilinJorge William Bermudez GaviriaNo ratings yet
- Technology Guide: For Television Engineers MAY 2018Document5 pagesTechnology Guide: For Television Engineers MAY 2018redineziri100% (1)
- CH 2 PC 3Document1 pageCH 2 PC 3Danny Q.No ratings yet
- Glossary of Broadcasting TermsDocument4 pagesGlossary of Broadcasting TermsJohn Roben AmbasNo ratings yet
- MS9520 Stand Installation Guide PDFDocument52 pagesMS9520 Stand Installation Guide PDFAli JosephNo ratings yet
- HP Elitebook Folio 9470m 6050A2514101Document80 pagesHP Elitebook Folio 9470m 6050A2514101ryancantau100% (1)
- Sample Investigatory ProjectDocument13 pagesSample Investigatory ProjectDhruv ChauhanNo ratings yet
- Aspire E1 521Document234 pagesAspire E1 521danielradu27No ratings yet
- Soundshield Wireless Headset DatasheetDocument4 pagesSoundshield Wireless Headset DatasheetBradNo ratings yet
- Microcontrolador BJ8P64NDocument7 pagesMicrocontrolador BJ8P64NJenry MarquinaNo ratings yet
- Brkucc 2735Document106 pagesBrkucc 2735silvano_lilianNo ratings yet
- Ethernet Cable: Local Area Networks, 2009 SpringDocument20 pagesEthernet Cable: Local Area Networks, 2009 Springcool4all89No ratings yet
- G6 ReviewerDocument1 pageG6 ReviewerMichael Angelo GarciaNo ratings yet
- Internal Guide:-Mrs. A.A. Askhedkar: by Dikita Chauhan Amita Joshi & Anuja KaradkhedkarDocument33 pagesInternal Guide:-Mrs. A.A. Askhedkar: by Dikita Chauhan Amita Joshi & Anuja KaradkhedkarMohit ChauhanNo ratings yet
- Porting uCOS-II To A PIC MicrocontrollerDocument18 pagesPorting uCOS-II To A PIC MicrocontrollerHimanshu SharmaNo ratings yet
- DC and Ac Analysis of Input Stage, Second Stage and Output StageDocument21 pagesDC and Ac Analysis of Input Stage, Second Stage and Output StageNarayan Mishra MishraNo ratings yet
- Data Sheet: GOF SIMPLEX Pigtail LC G62,5, 2m DescriptionDocument2 pagesData Sheet: GOF SIMPLEX Pigtail LC G62,5, 2m DescriptionAndrew LowNo ratings yet
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- When the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachFrom EverandWhen the Heavens Went on Sale: The Misfits and Geniuses Racing to Put Space Within ReachRating: 3.5 out of 5 stars3.5/5 (6)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (6)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (82)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- The Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeFrom EverandThe Manager's Path: A Guide for Tech Leaders Navigating Growth and ChangeRating: 4.5 out of 5 stars4.5/5 (99)
- Mini Farming: Self-Sufficiency on 1/4 AcreFrom EverandMini Farming: Self-Sufficiency on 1/4 AcreRating: 4 out of 5 stars4/5 (76)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (588)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The Knowledge: How to Rebuild Our World from ScratchFrom EverandThe Knowledge: How to Rebuild Our World from ScratchRating: 3.5 out of 5 stars3.5/5 (133)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- Process Plant Equipment: Operation, Control, and ReliabilityFrom EverandProcess Plant Equipment: Operation, Control, and ReliabilityRating: 5 out of 5 stars5/5 (1)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (122)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (242)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)