You might also like
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Master Ahmed Hussnain 2014Document8 pagesMaster Ahmed Hussnain 2014Hary YoskovichNo ratings yet
- Controller Design of A New Active Front Steering SystemDocument11 pagesController Design of A New Active Front Steering SystemENIC-AITCGNo ratings yet
- Steering Wheel Torque Control of Electric Power Steering by PD-ControlDocument5 pagesSteering Wheel Torque Control of Electric Power Steering by PD-ControlDuy VoNo ratings yet
- Driving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsDocument15 pagesDriving Modes For Designing The Cornering Response of Fully Electric Vehicles With Multiple MotorsAndrea FontanaNo ratings yet
- An - Application - of - Explicit - Model - Predictive - Control - To - Electric - Power - Assisted - Steering - SystemsDocument6 pagesAn - Application - of - Explicit - Model - Predictive - Control - To - Electric - Power - Assisted - Steering - Systems시드세흐리아르알리나크비No ratings yet
- Technical Transactions 8/2019Document16 pagesTechnical Transactions 8/2019Mohan NaikNo ratings yet
- Parameter Identification and Comparision of An Induction Motor ModelsDocument11 pagesParameter Identification and Comparision of An Induction Motor ModelsJUAN4201No ratings yet
- Optimal Control System Based EPASDocument8 pagesOptimal Control System Based EPASNarender KumarNo ratings yet
- Au Mit Dame 3.4.5 18Document8 pagesAu Mit Dame 3.4.5 18Hemanth C KNo ratings yet
- The Seamless Gear Shifting Control For Pure Electric Vehicle With 2-Speed Inverse-AMTDocument5 pagesThe Seamless Gear Shifting Control For Pure Electric Vehicle With 2-Speed Inverse-AMTmihai_1957No ratings yet
- Active Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der SuDocument6 pagesActive Damping Control of Hybrid Stepping Motor: Sheng-Ming Yang, Member, IEEE and Pei-Der Su01689373477No ratings yet
- accPSO - SESIP - WSEASDocument10 pagesaccPSO - SESIP - WSEASYanartas Le GinNo ratings yet
- Integration of Real-Time Electric Power Steering System Matlab/Simulink Model Into National Instruments Veristand EnvironmentDocument5 pagesIntegration of Real-Time Electric Power Steering System Matlab/Simulink Model Into National Instruments Veristand EnvironmentPatricio Pozo RamirezNo ratings yet
- Active Damping of Drive Train Oscillations For An Electrically Driven VehicleDocument4 pagesActive Damping of Drive Train Oscillations For An Electrically Driven Vehiclejhg12No ratings yet
- Active Magnetic Bearings For Frictionless Rotating Machineries by Joga Dharma SetiawanDocument6 pagesActive Magnetic Bearings For Frictionless Rotating Machineries by Joga Dharma SetiawanNikkizGogasNo ratings yet
- Annals 2013 2 19 PDFDocument4 pagesAnnals 2013 2 19 PDFLohith B.YNo ratings yet
- Dynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelDocument5 pagesDynamic Analysis of Synchronous Reluctance Motor Drives Based On Simulink and Finite Element ModelenmnabilNo ratings yet
- Speed Control of Switched Reluctance Motor Based On Fuzzy Logic ControllerDocument5 pagesSpeed Control of Switched Reluctance Motor Based On Fuzzy Logic Controllergodspower brunoNo ratings yet
- !TL Ia Ess, SA: 6400 W. Mequon WI USADocument6 pages!TL Ia Ess, SA: 6400 W. Mequon WI USAPushpaRasnayakeNo ratings yet
- The Design of A Controller For The Steer-by-Wire System: Key WordsDocument12 pagesThe Design of A Controller For The Steer-by-Wire System: Key WordsdashNo ratings yet
- AC Servo Motor-1Document6 pagesAC Servo Motor-1Tawhid Bin TarekNo ratings yet
- 445 AndradaDocument5 pages445 AndradaNishant GoyalNo ratings yet
- Analysis of Braking Force Efficiency MeasurementsDocument7 pagesAnalysis of Braking Force Efficiency MeasurementsHsan HaddarNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- Simulated and Experimental Study of Antilock Braking System Using Grey Sliding Mode ControlDocument6 pagesSimulated and Experimental Study of Antilock Braking System Using Grey Sliding Mode ControlAli AkbarNo ratings yet
- DC MotorDocument4 pagesDC MotorGetnet MekonnenNo ratings yet
- Diesel LocomotivesDocument20 pagesDiesel LocomotivesAashish Singhal100% (2)
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDocument15 pagesSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNo ratings yet
- Control of Electric Vehicle: University of Electronic Science and Technology of China P.R.ChinaDocument32 pagesControl of Electric Vehicle: University of Electronic Science and Technology of China P.R.ChinaromoNo ratings yet
- InTech-Control of Electric VehicleDocument32 pagesInTech-Control of Electric VehicleABHILASH NETAKENo ratings yet
- Novel Clamping Force Control For Electric Parking Brake SystemsDocument6 pagesNovel Clamping Force Control For Electric Parking Brake SystemsAhmed AlostazNo ratings yet
- Electrically Powered Hydraulic Steering System: New Generation ofDocument3 pagesElectrically Powered Hydraulic Steering System: New Generation ofVrushabh SahareNo ratings yet
- Ijert Ijert: Position Control of DC Motor by Compensating StrategiesDocument7 pagesIjert Ijert: Position Control of DC Motor by Compensating StrategiesR.SRIKANTHNo ratings yet
- Subject (UNREG08) - Sensorless Motor ControlDocument7 pagesSubject (UNREG08) - Sensorless Motor ControlsorrowarNo ratings yet
- Optimal State Space Control DC MotorDocument6 pagesOptimal State Space Control DC MotoraurivalNo ratings yet
- Model Predictive Direct Torque Control Methods For SpeedDocument25 pagesModel Predictive Direct Torque Control Methods For SpeedAayush PatidarNo ratings yet
- Robust Control of Electric Power-Assisted Steering System: Xiang Chen, Xiaoqun Chen, and Ke LiDocument6 pagesRobust Control of Electric Power-Assisted Steering System: Xiang Chen, Xiaoqun Chen, and Ke LiHariz DanialNo ratings yet
- Maglev ConveyorDocument7 pagesMaglev ConveyorLalbahadur MajhiNo ratings yet
- Intelligent Control of The Regenerative Braking in An Induction Motor DriveDocument7 pagesIntelligent Control of The Regenerative Braking in An Induction Motor Driveafshin keshtkarNo ratings yet
- 2 Symposium On Lift and Escalator TechnologiesDocument12 pages2 Symposium On Lift and Escalator TechnologiesfreddyjoertyNo ratings yet
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainNo ratings yet
- Multi-Motor DrivesDocument6 pagesMulti-Motor DrivessriabolfazlNo ratings yet
- Suspension AnalysisDocument6 pagesSuspension AnalysisAnonymous 8plFyOLxNo ratings yet
- Wide Range Drive of Hybrid Stepping Motor With Flux-Weakening ControlDocument7 pagesWide Range Drive of Hybrid Stepping Motor With Flux-Weakening ControlTrần Tấn LộcNo ratings yet
- Bond Graph Modeling and Computer Simulation of Automotive Torque ConvertersDocument22 pagesBond Graph Modeling and Computer Simulation of Automotive Torque ConvertersPratik ShahNo ratings yet
- High-Speed and High-Precision Tracking Control Ofultrahigh-Acceleration Moving-Permanent-Magnetlinear Synchronous MotoDocument9 pagesHigh-Speed and High-Precision Tracking Control Ofultrahigh-Acceleration Moving-Permanent-Magnetlinear Synchronous MotoDoru DumitracheNo ratings yet
- Quantitative Analysis For The Vehicle Moment of Inertia and Physical SimulationDocument4 pagesQuantitative Analysis For The Vehicle Moment of Inertia and Physical SimulationSri BalajiNo ratings yet
- DC Motor Position Control EMDAP CVTDocument11 pagesDC Motor Position Control EMDAP CVTzulfikarzaidNo ratings yet
- 2000 Control ArticlesDocument29 pages2000 Control ArticlesPepe MeléndezNo ratings yet
- Engine Torque Ripple Cancellation With An Integrated Starter Alternator in A Hybrid Electric Vehicle: Implementation and ControlDocument6 pagesEngine Torque Ripple Cancellation With An Integrated Starter Alternator in A Hybrid Electric Vehicle: Implementation and Controlstefanovicana1No ratings yet
- Position Sensor Based Torque ControlDocument4 pagesPosition Sensor Based Torque ControlChandrajit GangulyNo ratings yet
- Paper CT4 Load Assumptions For Pitch System Manj 041Document5 pagesPaper CT4 Load Assumptions For Pitch System Manj 041mbreuking6943No ratings yet
- Question Bank For Electric DrivesDocument10 pagesQuestion Bank For Electric DrivesPradosh100% (1)
- Improved DTCDocument5 pagesImproved DTCHarsh AnandNo ratings yet
- Control of Electric Vehicle PDFDocument31 pagesControl of Electric Vehicle PDFBrunoZueroNo ratings yet
- NNS Notes ServomotorDocument9 pagesNNS Notes ServomotorNarendra SinhaNo ratings yet
- Electric TractorDocument5 pagesElectric TractorANAND.H.SNo ratings yet
- Experimental Evaluation of A New Braking System For Use in Passive Haptic DisplaysDocument5 pagesExperimental Evaluation of A New Braking System For Use in Passive Haptic Displaysfahrgeruste3961No ratings yet
- Paper Airplane ActivityDocument4 pagesPaper Airplane ActivityRey AbarientosNo ratings yet
- To Learn For How To Talk With BossDocument7 pagesTo Learn For How To Talk With BosssenthilduraiNo ratings yet
- System Design Assessment For A Helicopter Structural Usage Monitor by Richard A. SewerskyDocument112 pagesSystem Design Assessment For A Helicopter Structural Usage Monitor by Richard A. SewerskysenthilduraiNo ratings yet
- Doors API ManualDocument68 pagesDoors API ManualsenthilduraiNo ratings yet
- New Ways To Work in DOORSDocument70 pagesNew Ways To Work in DOORSsenthilduraiNo ratings yet
- 5 New Ways To Work in Word PDFDocument4 pages5 New Ways To Work in Word PDFazi_tongat09No ratings yet
- c1Document17 pagesc1sagar sutarNo ratings yet
- Weather ForecastDocument15 pagesWeather ForecastsenthilduraiNo ratings yet
- A Novel Circuit For Digital-2752Document6 pagesA Novel Circuit For Digital-2752senthilduraiNo ratings yet
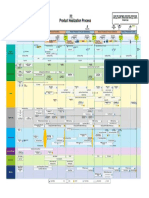
- Product Realization Process - MapDocument1 pageProduct Realization Process - Mapsenthildurai0% (1)
- Can FD From An Oems Point of ViewDocument8 pagesCan FD From An Oems Point of ViewsenthilduraiNo ratings yet
- Doors SodiusDocument59 pagesDoors SodiussenthilduraiNo ratings yet
- Lesson19 Autosar PDFDocument170 pagesLesson19 Autosar PDFBura RoxanaNo ratings yet
- Lesson19 Autosar PDFDocument170 pagesLesson19 Autosar PDFBura RoxanaNo ratings yet
- AGILE Innovation ReportDocument7 pagesAGILE Innovation ReportSuriya ArulselvanNo ratings yet
- Beams Deflection - Macaulay's MethodDocument4 pagesBeams Deflection - Macaulay's MethodYadanaNo ratings yet
- g10 Honors ScriptDocument2 pagesg10 Honors ScriptSarah Visperas RogasNo ratings yet
- HCF and LCM PixiPPtDocument16 pagesHCF and LCM PixiPPtAnonymous OlT7WTNo ratings yet
- MECHANICS 2 FormulaaaaaaaaassssDocument2 pagesMECHANICS 2 FormulaaaaaaaaassssIan Neil LaenoNo ratings yet
- (Lecture Notes in Computational Science and Engineering 10) Jeremy Siek, Andrew Lumsdaine (Auth.), Hans Petter Langtangen, Are Magnus Bruaset, Ewald Quak (Eds.) - Advances in Software Tools For ScientDocument361 pages(Lecture Notes in Computational Science and Engineering 10) Jeremy Siek, Andrew Lumsdaine (Auth.), Hans Petter Langtangen, Are Magnus Bruaset, Ewald Quak (Eds.) - Advances in Software Tools For ScientNguyen Tri NguyenNo ratings yet
- Percentage ProblemsDocument8 pagesPercentage ProblemsvaranasilkoNo ratings yet
- Calculus Quiz SolutionDocument7 pagesCalculus Quiz SolutionkhudzairiNo ratings yet
- BK Birla Institue of Engineering & Technolgy (Bkbiet) Dbms Lab Sheet ViDocument5 pagesBK Birla Institue of Engineering & Technolgy (Bkbiet) Dbms Lab Sheet ViVipin SaraogiNo ratings yet
- Section 12.1-12.2Document18 pagesSection 12.1-12.2Ahmed AlouhNo ratings yet
- Anchor Chair Design CheckDocument5 pagesAnchor Chair Design CheckManish542No ratings yet
- Chow TestDocument2 pagesChow TestWhitney LeungNo ratings yet
- Tap FSMDocument39 pagesTap FSMMadhukumar KsNo ratings yet
- Assignment-1 - Engg Mech-1Document5 pagesAssignment-1 - Engg Mech-1NiteshNo ratings yet
- Bee Lab ManualDocument69 pagesBee Lab ManualYash AryaNo ratings yet
- 1 Class Assignments Miscellaneous - PMDDocument3 pages1 Class Assignments Miscellaneous - PMDRaghavJainNo ratings yet
- BuchblockDocument103 pagesBuchblockRafiqul IslamNo ratings yet
- Success Physics PDFDocument336 pagesSuccess Physics PDFtranhuutuong0% (1)
- Thesis 1Document10 pagesThesis 1miknayrb galdianoNo ratings yet
- SSVR Single Phase enDocument4 pagesSSVR Single Phase enankur rathiNo ratings yet
- Ee 2027Document5 pagesEe 2027qais652002No ratings yet
- Project Report On Broadband MIMO-OFDM Wireless CommunicationsDocument10 pagesProject Report On Broadband MIMO-OFDM Wireless Communicationsanon_70493563No ratings yet
- BME ScheduleDocument1 pageBME ScheduleStephen SloanNo ratings yet
- 4BCh06 (Basic Properties of Circles 1)Document37 pages4BCh06 (Basic Properties of Circles 1)api-19856023No ratings yet
- Form Meets Function: Polar Graphing Project: DirectionsDocument4 pagesForm Meets Function: Polar Graphing Project: DirectionsvikNo ratings yet
- Multiple Choice Questions Subject: Research Methodology Paper Code: BBA 206 Unit IDocument15 pagesMultiple Choice Questions Subject: Research Methodology Paper Code: BBA 206 Unit IVicky KumarNo ratings yet
- D.A.V. Public School, Berhampur, Odisha: ND TH THDocument3 pagesD.A.V. Public School, Berhampur, Odisha: ND TH THSimanchal SadangiNo ratings yet
- Permutations and CombinationsDocument6 pagesPermutations and Combinationsnandank44373No ratings yet
- Alysia Citta Paramitha - Tugas 6 Dan 7Document7 pagesAlysia Citta Paramitha - Tugas 6 Dan 7Moe ChannelNo ratings yet
- Questions - 1Document55 pagesQuestions - 1Yogesh BansalNo ratings yet
- Mos 2 MarksDocument19 pagesMos 2 Markssathiya21No ratings yet