You might also like
- Small Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingDocument5 pagesSmall Signal Modeling and Analysis of Synchronverters: Zhou Wei, Chen Jie and Gong ChunyingEnimien AymenNo ratings yet
- Mathematical Aspects of Simulating Efficient RF Operation of HemtsDocument9 pagesMathematical Aspects of Simulating Efficient RF Operation of HemtsGennadiyNo ratings yet
- MultiLayer DONEDocument13 pagesMultiLayer DONEDouglas ColvinNo ratings yet
- Ieee Word Format A4 PDFDocument4 pagesIeee Word Format A4 PDFPardha Saradhi JNo ratings yet
- A Simple Approach For Determining Core-Loss of Magnetic MaterialsDocument3 pagesA Simple Approach For Determining Core-Loss of Magnetic MaterialsHoàng Tâm LêNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- Grayver E.-Direct Digital Frequency Synthesis Using A Modified CORDICDocument4 pagesGrayver E.-Direct Digital Frequency Synthesis Using A Modified CORDICMina MagedNo ratings yet
- Fixed-Point Multiplication and Division in The Logarithmic Number System: A Way To Low-Power DesignDocument9 pagesFixed-Point Multiplication and Division in The Logarithmic Number System: A Way To Low-Power DesignAnjuJoseTomKarukappallilNo ratings yet
- Seismic MultiatributDocument18 pagesSeismic MultiatributLINDA ARDITA PUTRINo ratings yet
- L2 DiversityDocument26 pagesL2 DiversityNayim MohammadNo ratings yet
- A New Method of Load Distribution Networks: Flow Solution of RadialDocument14 pagesA New Method of Load Distribution Networks: Flow Solution of RadialSARITHA SNo ratings yet
- Panah 85 2016 P 1119 1135 PDFDocument17 pagesPanah 85 2016 P 1119 1135 PDFNovack HenriqueNo ratings yet
- Electromagnetic Field Analysis On Surge Response of 500 KV EHV Single Circuit Transmission Tower in Lightning Protection System Using Neural NetworksDocument4 pagesElectromagnetic Field Analysis On Surge Response of 500 KV EHV Single Circuit Transmission Tower in Lightning Protection System Using Neural NetworksFikri YansyahNo ratings yet
- Sliding Mode Control of A Magnetic Levitation System: Received 18 October 2003 and in Revised Form 23 February 2004Document16 pagesSliding Mode Control of A Magnetic Levitation System: Received 18 October 2003 and in Revised Form 23 February 2004Nayan NitnawareNo ratings yet
- Globecom 2006Document6 pagesGlobecom 2006Theodoros TsiftsisNo ratings yet
- Two-Dimensional Ising Model Chapter SummaryDocument22 pagesTwo-Dimensional Ising Model Chapter SummaryAkshay kumarNo ratings yet
- Free VibrationDocument5 pagesFree VibrationLokesh DandgavalNo ratings yet
- Application FFT-LVDTDocument6 pagesApplication FFT-LVDTnapoleon_velasc3617No ratings yet
- Near Field Coupling with Small RFID ObjectsDocument5 pagesNear Field Coupling with Small RFID ObjectsDuc DucNo ratings yet
- Single Stub MatchingDocument5 pagesSingle Stub MatchingTafadzwa NyoniNo ratings yet
- A Statistical Analysis of The 2D Discrete Wavelet TransformDocument7 pagesA Statistical Analysis of The 2D Discrete Wavelet TransformCharan Macharla'sNo ratings yet
- Feed Forward PDFDocument4 pagesFeed Forward PDFSneha TiwariNo ratings yet
- Detailed Model Parameters Estimation of Transformer HV Winding Based On Neural NetworksDocument6 pagesDetailed Model Parameters Estimation of Transformer HV Winding Based On Neural NetworksTransformadores Eléctricos - Omar BarbosaNo ratings yet
- S U R J S S: Indh Niversity Esearch Ournal (Cience Eries)Document8 pagesS U R J S S: Indh Niversity Esearch Ournal (Cience Eries)Awais AslamNo ratings yet
- ICCASM 2010: Identification and Diagnosis of Electrical Fault of Asynchronous Motor Using Wavelet and Neural NetworkDocument3 pagesICCASM 2010: Identification and Diagnosis of Electrical Fault of Asynchronous Motor Using Wavelet and Neural Networkddatdh1No ratings yet
- Управление шунтирующим активным силовым фильтром с использованием адаптивных алгоритмов NLMS и QR-RLSDocument7 pagesУправление шунтирующим активным силовым фильтром с использованием адаптивных алгоритмов NLMS и QR-RLSRoma PervenenokNo ratings yet
- Optimal Design of Circular Inductors: Goran Stojanovi C, Ljiljana Zivanov, and Mirjana Damnjanovi CDocument14 pagesOptimal Design of Circular Inductors: Goran Stojanovi C, Ljiljana Zivanov, and Mirjana Damnjanovi CpravinNo ratings yet
- Random Dopant Fluctuation Modelling With The Impedance Field MethodDocument4 pagesRandom Dopant Fluctuation Modelling With The Impedance Field MethodAllan Roberto MoltoNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- 4 Art Lucache DDocument5 pages4 Art Lucache Dplamadeala.vasile.tudorNo ratings yet
- Chapter 2Document50 pagesChapter 2hrakbariniaNo ratings yet
- 06 - Yskawi SkiDocument11 pages06 - Yskawi SkiFaisal JavaidNo ratings yet
- A Three-Stage Operational Transconductance Amplifier For Delta Sigma ModulatorDocument6 pagesA Three-Stage Operational Transconductance Amplifier For Delta Sigma ModulatorZuriel EduardoNo ratings yet
- CALCULATION OF DISTRIBUTION TRANSFORMER LEAKAGE REACTANCEDocument5 pagesCALCULATION OF DISTRIBUTION TRANSFORMER LEAKAGE REACTANCEcristian1961No ratings yet
- Interference EE - ICC09Document5 pagesInterference EE - ICC09gameOverNo ratings yet
- 9 Ieee Conf Soa 2015Document7 pages9 Ieee Conf Soa 2015Lokanath TripathyNo ratings yet
- SSRN Id4096882Document6 pagesSSRN Id4096882AhmedphmaNo ratings yet
- Sizing Power Delay GatewayDocument6 pagesSizing Power Delay GatewayBalakrishna JakkaNo ratings yet
- 02 IfacpcsurveyDocument12 pages02 IfacpcsurveySyed Shujaat AliNo ratings yet
- Space-Time Adaptive Processing (STAP) in Wireless CommunicationsDocument9 pagesSpace-Time Adaptive Processing (STAP) in Wireless CommunicationsgurusachinnuNo ratings yet
- Chittibabu PaprDocument12 pagesChittibabu PaprRamesh NaiduNo ratings yet
- Lin Et AlDocument10 pagesLin Et AlGoran MiljkovicNo ratings yet
- Artículo 1 - Identification of Control Parameters of The Permanent MagneticDocument8 pagesArtículo 1 - Identification of Control Parameters of The Permanent MagneticANDERSON ADONIS SOSA LOPEZNo ratings yet
- 6 TransMag Magnetic Design Considerations of Bidirectional InductiveDocument5 pages6 TransMag Magnetic Design Considerations of Bidirectional InductivemarwanNo ratings yet
- Adaptive Beamforming For Ds-Cdma Using Conjugate Gradient Algorithm in Multipath Fading ChannelDocument5 pagesAdaptive Beamforming For Ds-Cdma Using Conjugate Gradient Algorithm in Multipath Fading ChannelV'nod Rathode BNo ratings yet
- Design of A New Area Control Error Based Load Frequency Controller For A Two-Area Interconnected Power SystemDocument5 pagesDesign of A New Area Control Error Based Load Frequency Controller For A Two-Area Interconnected Power SystemzahidNo ratings yet
- A Log Periodic Series Fed Antennas Array Design Using A Simple Transmission Line ModelDocument10 pagesA Log Periodic Series Fed Antennas Array Design Using A Simple Transmission Line ModelSubhanjali MyneniNo ratings yet
- Apparent Power and Reactive Power in Three-Phase NetworksDocument4 pagesApparent Power and Reactive Power in Three-Phase Networks1981todurkarNo ratings yet
- Wave THD 2Document7 pagesWave THD 2Ivan BallesterosNo ratings yet
- Ieee Wind EnergyDocument16 pagesIeee Wind EnergyAnonymous ZFt1pzKY1No ratings yet
- DSP and Power System ProtectionDocument11 pagesDSP and Power System ProtectionsegamegaNo ratings yet
- Transmission Lines ExplainedDocument12 pagesTransmission Lines ExplainedRafaqat AliNo ratings yet
- ECE451 Lab 06Document5 pagesECE451 Lab 06Nabil DakhliNo ratings yet
- Calculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station PrefaceDocument11 pagesCalculation and Measuring of Low-Frequency Magnetic Field of 10 (20) /0,4 KV Transformer Station Prefaceh_salkicNo ratings yet
- Pc-Ee 601Document36 pagesPc-Ee 601Koustav SahaNo ratings yet
- Ngac Ky Nguyen 2008Document6 pagesNgac Ky Nguyen 2008oualid zouggarNo ratings yet
- A Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelDocument10 pagesA Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelSugunaNo ratings yet
- Design of Wideband CMOS LNA With Active Inductor and Using Noise-Canceling TechniqueDocument4 pagesDesign of Wideband CMOS LNA With Active Inductor and Using Noise-Canceling TechniqueEADALADA LAVANYANo ratings yet
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- An-851 Application Note: A Wimax Double Downconversion If Sampling Receiver DesignDocument8 pagesAn-851 Application Note: A Wimax Double Downconversion If Sampling Receiver Designbulli babuNo ratings yet
- P E M WIMAX IEEE 802.16E H H: Erformance Valuation OF Obile FOR ARD AndoverDocument14 pagesP E M WIMAX IEEE 802.16E H H: Erformance Valuation OF Obile FOR ARD Andoverbulli babuNo ratings yet
- Swry011 PDFDocument9 pagesSwry011 PDFbulli babuNo ratings yet
- Wimax Wimax: Book Review Book ReviewDocument3 pagesWimax Wimax: Book Review Book Reviewbulli babuNo ratings yet
- Wimax Mobility: Ensc 427: Communication NetworksDocument18 pagesWimax Mobility: Ensc 427: Communication NetworksFaris OmarNo ratings yet
- Aaai 07Document6 pagesAaai 07bulli babuNo ratings yet
- Ti Simplelink™ Cc3000 Module - Wi-Fi 802.11B/G Network ProcessorDocument17 pagesTi Simplelink™ Cc3000 Module - Wi-Fi 802.11B/G Network Processorbulli babuNo ratings yet
- FD WiFi Acceptable Use Policy - 4contractorsDocument2 pagesFD WiFi Acceptable Use Policy - 4contractorsbulli babuNo ratings yet
- WifiDocument19 pagesWifibulli babuNo ratings yet
- MRF7S38040HDocument15 pagesMRF7S38040Hbulli babuNo ratings yet
- Lopez Vizcaà - No - Jorge PDFDocument86 pagesLopez Vizcaà - No - Jorge PDFbulli babuNo ratings yet
- p117 Li PDFDocument12 pagesp117 Li PDFbulli babuNo ratings yet
- Understanding and Modeling of Wifi Signal Based Human Activity RecognitionDocument12 pagesUnderstanding and Modeling of Wifi Signal Based Human Activity Recognitionbulli babuNo ratings yet
- Multiple Urn NBN Si Doc-98begyq9Document7 pagesMultiple Urn NBN Si Doc-98begyq9bulli babuNo ratings yet
- Achieving Frequency Reuse 1 in WiMAX with BeamformingDocument14 pagesAchieving Frequency Reuse 1 in WiMAX with Beamformingbulli babuNo ratings yet
- Ieee T VT Sep1999 KGNHDocument15 pagesIeee T VT Sep1999 KGNHbulli babuNo ratings yet
- Lmu 200 CdmaDocument2 pagesLmu 200 Cdmafeku fekuNo ratings yet
- Security Centric Investigation of Wimax ReadDocument2 pagesSecurity Centric Investigation of Wimax Readbulli babuNo ratings yet
- Qualcomm Redacted ComplaintDocument35 pagesQualcomm Redacted ComplaintKif LeswingNo ratings yet
- RavenXTV CDMA Sierra Wireless Cellular ModemDocument48 pagesRavenXTV CDMA Sierra Wireless Cellular Modemfeku fekuNo ratings yet
- Draft: Lin - Cdma - Dvi Dated 4:45pm, Wednesday, July 26, 2000Document32 pagesDraft: Lin - Cdma - Dvi Dated 4:45pm, Wednesday, July 26, 2000bulli babuNo ratings yet
- CR 1525Document4 pagesCR 1525bulli babuNo ratings yet
- Joint Resource Allocation and Base-Station Assignment For The Downlink in CDMA NetworksDocument14 pagesJoint Resource Allocation and Base-Station Assignment For The Downlink in CDMA Networksbulli babuNo ratings yet
- Of Cdma: Performance Multi-Code in A Multipath Fading ChannelDocument6 pagesOf Cdma: Performance Multi-Code in A Multipath Fading Channelfeku fekuNo ratings yet
- TG4 Installation Guide PDFDocument34 pagesTG4 Installation Guide PDFbulli babuNo ratings yet
- Kalai-Smorodinsky Bargaining Solution For Optimal Resource Allocation Over Wireless DS-CDMA Visual Sensor NetworksDocument11 pagesKalai-Smorodinsky Bargaining Solution For Optimal Resource Allocation Over Wireless DS-CDMA Visual Sensor Networksbulli babuNo ratings yet
- Calculating CDMA Channel CapacityDocument36 pagesCalculating CDMA Channel Capacityfeku fekuNo ratings yet
- Optimal SIR Power UpdatesDocument6 pagesOptimal SIR Power Updatesfeku fekuNo ratings yet
- Variable BitsDocument23 pagesVariable Bitsbulli babuNo ratings yet
- Preparing For 2024: Election Technology and The Battle Against DisinformationDocument13 pagesPreparing For 2024: Election Technology and The Battle Against DisinformationVerified VotingNo ratings yet
- Ec010 505 Applied Electromagnetic TheoryDocument2 pagesEc010 505 Applied Electromagnetic Theorywalternampimadom100% (1)
- SELECTING A DISTILLATION COLUMN CONTROL STRATEGYDocument12 pagesSELECTING A DISTILLATION COLUMN CONTROL STRATEGYinstrutech0% (1)
- Louise Bedford Trading InsightsDocument80 pagesLouise Bedford Trading Insightsartendu100% (3)
- Ammonium Nitrophosphate Production ProcessDocument133 pagesAmmonium Nitrophosphate Production ProcessHit Busa100% (1)
- Web Servers ExplainedDocument15 pagesWeb Servers ExplainedIman AJNo ratings yet
- Dimensions of Comparative EducationDocument5 pagesDimensions of Comparative Educationeminentsurvivor9No ratings yet
- Vandergrift - Listening, Modern Theory & PracticeDocument6 pagesVandergrift - Listening, Modern Theory & PracticeKarolina CiNo ratings yet
- Online Dispute ResolutionDocument18 pagesOnline Dispute ResolutionMak YabuNo ratings yet
- Computer Assisted Language LearningDocument9 pagesComputer Assisted Language Learningapi-342801766No ratings yet
- Activity7 Raptshia DataSetDocument16 pagesActivity7 Raptshia DataSetoneinamillionnamedlunaNo ratings yet
- Summary of Relief Scenarios: Contingency DataDocument3 pagesSummary of Relief Scenarios: Contingency Dataimtinan mohsinNo ratings yet
- Nord Lock Washers Material Type GuideDocument1 pageNord Lock Washers Material Type GuideArthur ZinkeNo ratings yet
- The NF and BNF Charts from the Trading RoomDocument23 pagesThe NF and BNF Charts from the Trading RoomSinghRaviNo ratings yet
- Medical ParasitologyDocument33 pagesMedical ParasitologyAlexander Luie Jhames SaritaNo ratings yet
- Praveen Verma Auto CAD IntershipDocument15 pagesPraveen Verma Auto CAD IntershipPraveen vermaNo ratings yet
- The 4Ms of Operations: Prepared By: Karla Jane F. BangaysisoDocument18 pagesThe 4Ms of Operations: Prepared By: Karla Jane F. BangaysisoKarla BangFerNo ratings yet
- Physical GEOGRAPHY - TIEDocument432 pagesPhysical GEOGRAPHY - TIEnassorussi9No ratings yet
- Accenture Faq For New JoinersDocument4 pagesAccenture Faq For New JoinersBaazinow Hack Brainbaazi Live AnswersNo ratings yet
- Emily Act 3 GraficoDocument13 pagesEmily Act 3 Graficoemily lopezNo ratings yet
- BICs Policy 2021 - FinalDocument8 pagesBICs Policy 2021 - FinalIrfan U ShahNo ratings yet
- Aegon Life Insurance Marketing Strategy AnalysisDocument22 pagesAegon Life Insurance Marketing Strategy AnalysissalmanNo ratings yet
- Mercado - 10 Fabrikam Investments SolutionDocument3 pagesMercado - 10 Fabrikam Investments SolutionMila MercadoNo ratings yet
- Organic FertilizerDocument2 pagesOrganic FertilizerBien Morfe67% (3)
- Next-Generation Widebody Conversion: in Service From 2017 ONWARDSDocument6 pagesNext-Generation Widebody Conversion: in Service From 2017 ONWARDSAgusNo ratings yet
- Technology Unit 1 UTUDocument19 pagesTechnology Unit 1 UTUDaNo ratings yet
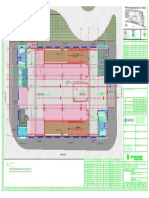
- Key plan and area statement comparison for multi-level car park (MLCPDocument1 pageKey plan and area statement comparison for multi-level car park (MLCP121715502003 BOLLEMPALLI BINDU SREE SATYANo ratings yet
- Porter 5 ForcesDocument44 pagesPorter 5 ForcesSwapnil ChonkarNo ratings yet
- PCM320 IDM320 NIM220 PMM310 Base Release Notes 1210Document48 pagesPCM320 IDM320 NIM220 PMM310 Base Release Notes 1210Eduardo Lecaros CabelloNo ratings yet
- L5 Isomerism 3Document16 pagesL5 Isomerism 3Cheng FuNo ratings yet