You might also like
- A Hybrid Method For Critical Clearing Time Evaluation of Multi-Machine SystemsDocument7 pagesA Hybrid Method For Critical Clearing Time Evaluation of Multi-Machine Systemswvargas926No ratings yet
- Model Validation For The August 10, 1996 WSCC System Outage PDFDocument13 pagesModel Validation For The August 10, 1996 WSCC System Outage PDFwvargas926No ratings yet
- Generator Model Validation Using PMU Data For MOD-26, MOD-27 RequirementsDocument34 pagesGenerator Model Validation Using PMU Data For MOD-26, MOD-27 Requirementswvargas926No ratings yet
- Modeling and Simulation of The Propagation of Harmonics in Electric Power Networks. I. Concepts, Models, and Simulation TechniquesDocument10 pagesModeling and Simulation of The Propagation of Harmonics in Electric Power Networks. I. Concepts, Models, and Simulation Techniqueswvargas926No ratings yet
- Static Analysis For Efficient Affine Arithmetic On GPUsDocument89 pagesStatic Analysis For Efficient Affine Arithmetic On GPUswvargas926No ratings yet
- On-Line Overhead Transmission Line and Transformer Parameters Identification Based On PMU MeasurementsDocument6 pagesOn-Line Overhead Transmission Line and Transformer Parameters Identification Based On PMU Measurementswvargas926No ratings yet
- Modeling Devices With Nonlinear Voltage-Current Characteristics For Harmonic Studies PDFDocument10 pagesModeling Devices With Nonlinear Voltage-Current Characteristics For Harmonic Studies PDFwvargas926No ratings yet
- IEEE-IEC Measuring Relays and Protection Equipment Part 24 Common Format For Transient Data Exchange (COMTRADE) For Power SystemsDocument73 pagesIEEE-IEC Measuring Relays and Protection Equipment Part 24 Common Format For Transient Data Exchange (COMTRADE) For Power Systemswvargas926No ratings yet
- Survey of Harmonics Measurements in Electrical Distribution SystemsDocument7 pagesSurvey of Harmonics Measurements in Electrical Distribution Systemswvargas926No ratings yet
- Image and Vision Computing: Rama ChellappaDocument3 pagesImage and Vision Computing: Rama Chellappawvargas926No ratings yet
- SVC Dynamic Analytical ModelDocument1 pageSVC Dynamic Analytical Modelwvargas926No ratings yet
- A Two Stage Fault Location Algorithm For Locating Faults On Transmission LinesDocument6 pagesA Two Stage Fault Location Algorithm For Locating Faults On Transmission Lineswvargas926No ratings yet
- Mscthesis Parmar PDFDocument86 pagesMscthesis Parmar PDFwvargas926No ratings yet
- Detection of Transmission Line Faults Using Discrete Wavelet TransformDocument6 pagesDetection of Transmission Line Faults Using Discrete Wavelet Transformwvargas926No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lab ManualDocument15 pagesLab ManualsamyukthabaswaNo ratings yet
- P40Agile P541 - 2 - 3 - 4 - 5 6 Guideform SpecificationDocument15 pagesP40Agile P541 - 2 - 3 - 4 - 5 6 Guideform SpecificationprinceNo ratings yet
- Latitude 5424 Rugged Spec SheetDocument5 pagesLatitude 5424 Rugged Spec SheetHaitemNo ratings yet
- Group H Macroeconomics Germany InflationDocument13 pagesGroup H Macroeconomics Germany Inflationmani kumarNo ratings yet
- Sowk-625 Iq Tool 4Document22 pagesSowk-625 Iq Tool 4api-405320544No ratings yet
- Influence of Intellectual Capital in The Organizational InnovationDocument8 pagesInfluence of Intellectual Capital in The Organizational InnovationsopingiNo ratings yet
- Mysuru Royal Institute of Technology. Mandya: Question Bank-1Document2 pagesMysuru Royal Institute of Technology. Mandya: Question Bank-1chaitragowda213_4732No ratings yet
- BSC IT SyllabusDocument32 pagesBSC IT Syllabusஜூலியன் சத்தியதாசன்No ratings yet
- Reaching Different Learning Styles ThrouDocument29 pagesReaching Different Learning Styles ThrouKENNETH HERRERANo ratings yet
- Performance Ratio Analysis Based On Energy Production For Large-Scale Solar PlantDocument22 pagesPerformance Ratio Analysis Based On Energy Production For Large-Scale Solar PlantPrateek MalhotraNo ratings yet
- Chap 14Document31 pagesChap 14Dipti Bhavin DesaiNo ratings yet
- County Project Name Cycle Project Address Proj City Proj Zip Applicant/Owner Name HDGP $ Home $ FHTF $ Lihtc9 $ Help $ Oahtc $ Ghap $ HPF $ Lihtc4 $Document60 pagesCounty Project Name Cycle Project Address Proj City Proj Zip Applicant/Owner Name HDGP $ Home $ FHTF $ Lihtc9 $ Help $ Oahtc $ Ghap $ HPF $ Lihtc4 $Mamello PortiaNo ratings yet
- Demand Letter Template 39Document3 pagesDemand Letter Template 39AIG1 LOGISTICNo ratings yet
- Challan FormDocument2 pagesChallan FormSingh KaramvirNo ratings yet
- Data Loss PreventionDocument20 pagesData Loss Preventiondeepak4315No ratings yet
- Ein Extensive ListDocument60 pagesEin Extensive ListRoberto Monterrosa100% (2)
- Odontogenic CystsDocument5 pagesOdontogenic CystsBH ASMRNo ratings yet
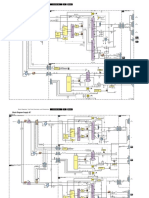
- Philips Chassis Lc4.31e Aa Power Dps 181 PDFDocument9 pagesPhilips Chassis Lc4.31e Aa Power Dps 181 PDFAouadi AbdellazizNo ratings yet
- Zone Controller: Th-LargeDocument1 pageZone Controller: Th-LargeIsmat AraNo ratings yet
- In Coming MailDocument4 pagesIn Coming Mailpoetoet100% (1)
- PLLV Client Consent FormDocument4 pagesPLLV Client Consent Formapi-237715517No ratings yet
- Mef Cecp TrainingDocument5 pagesMef Cecp TrainingShambhu KhanalNo ratings yet
- MF 660Document7 pagesMF 660Sebastian Vasquez OsorioNo ratings yet
- Roundup WG Bula MonsantoDocument16 pagesRoundup WG Bula MonsantodandanyddNo ratings yet
- Vehicle Detection and Identification Using YOLO in Image ProcessingDocument6 pagesVehicle Detection and Identification Using YOLO in Image ProcessingIJRASETPublicationsNo ratings yet
- Review of Financial Statements and Its Analysis: Rheena B. Delos Santos BSBA-1A (FM2)Document12 pagesReview of Financial Statements and Its Analysis: Rheena B. Delos Santos BSBA-1A (FM2)RHIAN B.No ratings yet
- Form DVAT 27A: Intimation of Deposit of Government DuesDocument2 pagesForm DVAT 27A: Intimation of Deposit of Government DueshhhhhhhuuuuuyyuyyyyyNo ratings yet
- COMPLAINT - THE STAN J. CATERBONE 42 U.S.C. 14141 "POLICE MISCONDUCT PROVISION" COMPLAINT TO U.S. DEPARTMENT OF JUSTICE August 24, 2017Document435 pagesCOMPLAINT - THE STAN J. CATERBONE 42 U.S.C. 14141 "POLICE MISCONDUCT PROVISION" COMPLAINT TO U.S. DEPARTMENT OF JUSTICE August 24, 2017Stan J. CaterboneNo ratings yet
- Network Administration and Mikrotik Router ConfigurationDocument17 pagesNetwork Administration and Mikrotik Router ConfigurationbiswasjoyNo ratings yet
- Raspberry Pi Installing Noobs OSDocument3 pagesRaspberry Pi Installing Noobs OSEXORCENo ratings yet