You might also like
- CM2880 Wiring Diagram enDocument1 pageCM2880 Wiring Diagram enAung Mh62% (21)
- Chapter 3 - Timer Counter ModulesDocument20 pagesChapter 3 - Timer Counter Modulespham tamNo ratings yet
- Timers in 8051 - NotesDocument13 pagesTimers in 8051 - NotesPeaceNo ratings yet
- Chapter3 Pic Timer Programming in CDocument30 pagesChapter3 Pic Timer Programming in Ckeerthana murugeswaranNo ratings yet
- 8051 TimersDocument17 pages8051 Timersfcmandi100% (1)
- 8051 TimersDocument20 pages8051 TimersRohitNo ratings yet
- TimersDocument22 pagesTimersghulam mustafaNo ratings yet
- Timers - Counters in 8051Document16 pagesTimers - Counters in 8051rajesh koneNo ratings yet
- Microprocessor & Microcontrollers: 8051 Timer Programming in Assembly and CDocument23 pagesMicroprocessor & Microcontrollers: 8051 Timer Programming in Assembly and CAbdul Rehman AfzalNo ratings yet
- C2 - TimersDocument41 pagesC2 - TimersMifzal IzzaniNo ratings yet
- 19BCT0046 VL2020210504730 Ast04Document11 pages19BCT0046 VL2020210504730 Ast04Shreyas GuduriNo ratings yet
- SECA3019 - Embedded Processors Lecture 2.3 Timers in ATMEGA328Document18 pagesSECA3019 - Embedded Processors Lecture 2.3 Timers in ATMEGA328sugadev74No ratings yet
- Chapter 3 TimerDocument49 pagesChapter 3 TimerFahmi LJNo ratings yet
- LPC1769 Interrupt ProgramDocument9 pagesLPC1769 Interrupt Programprathap100% (1)
- 8051 TIMERS: Timer RegistersDocument25 pages8051 TIMERS: Timer RegistersMohammad SaleemNo ratings yet
- Chapter 5 TimerDocument30 pagesChapter 5 TimerAndy WoNo ratings yet
- 4 Timer 8051 02 02 2023Document10 pages4 Timer 8051 02 02 2023Kruthika JNo ratings yet
- Microprocessors and Microcontrollers Lab: Title: ComponentsDocument8 pagesMicroprocessors and Microcontrollers Lab: Title: ComponentsGhulam E Muhammad UsmanNo ratings yet
- Timers: Dr. M. RamakrishnanDocument9 pagesTimers: Dr. M. Ramakrishnanmrama2No ratings yet
- WINSEM2023-24 BECE320E ETH VL2023240504752 2024-03-18 Reference-Material-IDocument32 pagesWINSEM2023-24 BECE320E ETH VL2023240504752 2024-03-18 Reference-Material-Ilakshit.choudhary2021No ratings yet
- Basics of Interrupts.: Steps Taken by Processor While Processing An InterruptDocument10 pagesBasics of Interrupts.: Steps Taken by Processor While Processing An InterruptAmy OliverNo ratings yet
- North South University Assignment-04Document3 pagesNorth South University Assignment-04Shafin DarkNo ratings yet
- Timer CounterDocument27 pagesTimer Counterusama saleemNo ratings yet
- WINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-27 Reference-Material-IDocument73 pagesWINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-27 Reference-Material-IDivya JagwaniNo ratings yet
- Iv TimersDocument48 pagesIv TimersanishthNo ratings yet
- 8051 Timer CounterDocument98 pages8051 Timer CounterpremNo ratings yet
- Topic: Timer and Counter of Dspic30F4011Document29 pagesTopic: Timer and Counter of Dspic30F4011Quang Thien BùiNo ratings yet
- Ec522 8051 10Document63 pagesEc522 8051 10Anurag BansalNo ratings yet
- 6 TimersDocument36 pages6 TimersTam PhamNo ratings yet
- 8051-CH9-TimePmg in Assem & CDocument101 pages8051-CH9-TimePmg in Assem & CshivaspyNo ratings yet
- Section 9.1 Programming 8051 TimersDocument8 pagesSection 9.1 Programming 8051 TimersAkshitKocherNo ratings yet
- Timer Serial and InterruptDocument20 pagesTimer Serial and InterruptAyan AcharyaNo ratings yet
- Topic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Document55 pagesTopic 12 - ATMega32 Timer in C (ISMAIL - FKEUTM 2017)Aya Amir100% (1)
- WINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-18 Reference-Material-IDocument53 pagesWINSEM2023-24 BECE320E ETH VL2023240504751 2024-03-18 Reference-Material-IDivya JagwaniNo ratings yet
- Section 14. Timers: HighlightsDocument26 pagesSection 14. Timers: HighlightsmartinhtNo ratings yet
- MPMC - Module - 3 - Part-2Document55 pagesMPMC - Module - 3 - Part-2atharv atreNo ratings yet
- PIC16f877a TimerDocument9 pagesPIC16f877a Timerjohn moron100% (2)
- 8051 Microcontroller - Timer ProgrammingDocument16 pages8051 Microcontroller - Timer ProgrammingABHISHEK DWIVEDI (RA2111043010082)No ratings yet
- Programmable Timing Functions Part 1: Timer-Generated InterruptsDocument25 pagesProgrammable Timing Functions Part 1: Timer-Generated InterruptsBui Van PhatNo ratings yet
- ES Exp 10Document13 pagesES Exp 10Maryam TariqNo ratings yet
- Microcontroller TimersDocument16 pagesMicrocontroller TimersjaltitiNo ratings yet
- Real Timer ControlDocument94 pagesReal Timer ControlSai Krishna KodaliNo ratings yet
- Lab ManualDocument101 pagesLab ManualSRINITHI P EEE KIOTNo ratings yet
- The 8051 Microcontroller: Timer OperationDocument47 pagesThe 8051 Microcontroller: Timer OperationHạo Tân NgôNo ratings yet
- TimerDocument29 pagesTimerhanhdoducNo ratings yet
- Homework 3Document8 pagesHomework 3Anshul GourNo ratings yet
- 8051 CH9 950217Document103 pages8051 CH9 950217Amardeep PotdarNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 16Document8 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 16Tomás BurónNo ratings yet
- CSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Document17 pagesCSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Santosh Kumar GowdaNo ratings yet
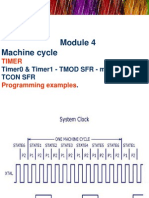
- Module 4Document22 pagesModule 4Rohit AnejaNo ratings yet
- One More Way To Load Timer 0: 4 4 0.2 10 0.2 20 10 20 Ms 20 10 100 10 0x186 0.2 S 0.2 10Document3 pagesOne More Way To Load Timer 0: 4 4 0.2 10 0.2 20 10 20 Ms 20 10 100 10 0x186 0.2 S 0.2 10yiNo ratings yet
- Using Timers of Microchip PIC18F Microcontrollers: Corrado SantoroDocument22 pagesUsing Timers of Microchip PIC18F Microcontrollers: Corrado SantoroChar SemNo ratings yet
- Ard TimersDocument60 pagesArd TimersMarcio Augusto BerenguelNo ratings yet
- Microcontrollers and Its Applications: Shivaum Heranjal L27+28 17BEC0315 Padmini T NDocument6 pagesMicrocontrollers and Its Applications: Shivaum Heranjal L27+28 17BEC0315 Padmini T NShivaum Heranjal100% (1)
- 5 Timer (Part 1)Document29 pages5 Timer (Part 1)dbhargavreddyNo ratings yet
- Chap10 13 tmr2 PWMDocument38 pagesChap10 13 tmr2 PWMThanh LeNo ratings yet
- CHP 3 - Pic Timer Programming in CDocument12 pagesCHP 3 - Pic Timer Programming in CTajuddin Razali100% (1)
- Chapter2 - TimersDocument26 pagesChapter2 - Timersadamwaiz100% (1)
- LAB6 TimerDocument8 pagesLAB6 TimerMalak Al-AshiNo ratings yet
- Timer - Programming SaDocument7 pagesTimer - Programming SaDK White LionNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Code-Based Testing of Extended Finite State Machine Models - PPT - v4Document36 pagesCode-Based Testing of Extended Finite State Machine Models - PPT - v4Ragini GuptaNo ratings yet
- Camera PresentationDocument11 pagesCamera PresentationRagini GuptaNo ratings yet
- An Iot Based Smart Energy Management of Hvac SystemDocument9 pagesAn Iot Based Smart Energy Management of Hvac SystemRagini GuptaNo ratings yet
- Basic Building Blocks of Embedded System: Microcontroller: CPU, I/Os, Memory, Interrupts, Timers, CommunicationsDocument23 pagesBasic Building Blocks of Embedded System: Microcontroller: CPU, I/Os, Memory, Interrupts, Timers, CommunicationsRagini GuptaNo ratings yet
- 7-Raspberry Pi Camera Interface-Final PDFDocument27 pages7-Raspberry Pi Camera Interface-Final PDFRagini Gupta100% (1)
- 02 PIC ADC Final PDFDocument68 pages02 PIC ADC Final PDFRagini GuptaNo ratings yet
- AR-Raspberry Pi Slides CompleteDocument21 pagesAR-Raspberry Pi Slides CompleteRagini GuptaNo ratings yet
- Algorithms: The Basic Methods Instance-Based Learning: Data ScienceDocument17 pagesAlgorithms: The Basic Methods Instance-Based Learning: Data ScienceRagini GuptaNo ratings yet
- FSM Testing 1Document45 pagesFSM Testing 1Ragini GuptaNo ratings yet
- Running Head: Are Cell Phones Modern-Day Drugs Amoung Students? 1Document13 pagesRunning Head: Are Cell Phones Modern-Day Drugs Amoung Students? 1Ragini GuptaNo ratings yet
- Running Head: Cell Phones Drugs Amoung Students 1Document12 pagesRunning Head: Cell Phones Drugs Amoung Students 1Ragini GuptaNo ratings yet
- Solution 1 - DFADocument5 pagesSolution 1 - DFARagini GuptaNo ratings yet
- PIC18F248Document402 pagesPIC18F248Ioannis PerperisNo ratings yet
- 6ED10521MD000BA3 Datasheet enDocument2 pages6ED10521MD000BA3 Datasheet enGameR VanrenheitNo ratings yet
- Celebration of A First-Year Anniversary Attempt To Contact Some Scientific OfficialsDocument3 pagesCelebration of A First-Year Anniversary Attempt To Contact Some Scientific OfficialsRostyslav SKLYAR, Dr. (Eng)No ratings yet
- Alfie Mini Spot ManualDocument10 pagesAlfie Mini Spot ManualDaniel MalagoliNo ratings yet
- 74 HC 4316Document12 pages74 HC 4316jhonco02No ratings yet
- RSL DisconnectedDocument2 pagesRSL DisconnectedGunawan HendroNo ratings yet
- Delta ModulationDocument44 pagesDelta ModulationJyotirmoy DekaNo ratings yet
- Dennis Shay CV 2013Document6 pagesDennis Shay CV 2013dpshayNo ratings yet
- Optimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFDocument49 pagesOptimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFLars GlöcknerNo ratings yet
- Ge 9100C NXTDocument4 pagesGe 9100C NXTSolomon YimerNo ratings yet
- Global Institute of Technology: Department of Electrical EngineeringDocument3 pagesGlobal Institute of Technology: Department of Electrical EngineeringDebabrato MukherjeeNo ratings yet
- How To Use The IEEE Reference FormatDocument4 pagesHow To Use The IEEE Reference FormatShanks XDNo ratings yet
- Zetta - 8GB eMMC and 8Gb 2 X 4Gb LPDDR3 MCP - DatasheetDocument9 pagesZetta - 8GB eMMC and 8Gb 2 X 4Gb LPDDR3 MCP - DatasheetAmzil Emmc UfsNo ratings yet
- Technical English-II Nov Dec 2009 Question Paper StudyhauntersDocument5 pagesTechnical English-II Nov Dec 2009 Question Paper StudyhauntersSriram JNo ratings yet
- 2822 HDocument3 pages2822 HKrank101No ratings yet
- Task 3 P2 Ionosphere CompleteDocument7 pagesTask 3 P2 Ionosphere CompleteSean GalvinNo ratings yet
- D 3820Document41 pagesD 3820teja tejaNo ratings yet
- IEEE Standard Requirements For Secondary Network ProtectorsDocument56 pagesIEEE Standard Requirements For Secondary Network ProtectorsMahmoud LotfyNo ratings yet
- Mini Project SynopsisDocument9 pagesMini Project SynopsisRohitNo ratings yet
- TTA-TWE Catálogo (Inglés)Document138 pagesTTA-TWE Catálogo (Inglés)kuraimund100% (1)
- News 210 Spanish Etl Etc EflDocument2 pagesNews 210 Spanish Etl Etc EflespernancacionNo ratings yet
- Continuous Time ConvolutionDocument28 pagesContinuous Time ConvolutionlhslhinNo ratings yet
- Ic21 Sect 10 Pilot DevicesDocument222 pagesIc21 Sect 10 Pilot DevicesFawzi AlzubairyNo ratings yet
- FLIRDocument3 pagesFLIRRamakrishnan AmbiSubbiahNo ratings yet
- AVT - Air Velocity TransmitterDocument4 pagesAVT - Air Velocity Transmitternik amirulNo ratings yet
- Amateur Radio Guide To DMRDocument28 pagesAmateur Radio Guide To DMRIeħor Biss100% (1)
- IV Predavanje (Computer Architecture)Document3 pagesIV Predavanje (Computer Architecture)Demal BecirovicNo ratings yet
- SECTION 15180 BMS and Automatic ControlsDocument32 pagesSECTION 15180 BMS and Automatic ControlskdpmansiNo ratings yet
- SIM900 at Command Manual V1.03Document229 pagesSIM900 at Command Manual V1.03Ben BenjiNo ratings yet