You might also like
- Reliability and Maintainability in Operations Management: Filippo de CarloDocument32 pagesReliability and Maintainability in Operations Management: Filippo de CarloBenjamin ZekićNo ratings yet
- Reliability and Maintainability in Operations Management: March 2013Document33 pagesReliability and Maintainability in Operations Management: March 2013PARUNGO VINCENT G.No ratings yet
- Reliability and MaintainabilityDocument33 pagesReliability and MaintainabilityRakeshNo ratings yet
- ConfiabilidadDocument33 pagesConfiabilidadrsantanaNo ratings yet
- Reliability and Maintainability in Operations ManagementDocument32 pagesReliability and Maintainability in Operations ManagementilublessingNo ratings yet
- Inteligence Agents ArchitectureDocument12 pagesInteligence Agents ArchitectureReshma DharmarajNo ratings yet
- Unit 14 RealibilityDocument20 pagesUnit 14 RealibilityNeway DadiNo ratings yet
- ArtigoDocument6 pagesArtigoAnderson OliveiraNo ratings yet
- Denise M. Woit Dept. of Computing and Information Science, Queen's University, Kingston, Ontario, Canada K7L 3N6 Woit@qucis - Queensu.caDocument10 pagesDenise M. Woit Dept. of Computing and Information Science, Queen's University, Kingston, Ontario, Canada K7L 3N6 Woit@qucis - Queensu.cadwoitNo ratings yet
- Discrete Event Simulation Concepts HandoutsDocument3 pagesDiscrete Event Simulation Concepts Handoutsarjun5005No ratings yet
- Design of Fault Tolerant System Based On Runtime Behavior TracingDocument4 pagesDesign of Fault Tolerant System Based On Runtime Behavior TracingDaniel ValadezNo ratings yet
- A Conditional Probability Approach To The Calculation of F-DDocument8 pagesA Conditional Probability Approach To The Calculation of F-DLourenço AnjosNo ratings yet
- UML Diagrams for eCommerce Application Case StudyDocument18 pagesUML Diagrams for eCommerce Application Case Studys_ilangoNo ratings yet
- Asynchronous Concurrency in Clojure and A Few Other LanguagesDocument32 pagesAsynchronous Concurrency in Clojure and A Few Other Languagesmh2295No ratings yet
- Reliability 6Document15 pagesReliability 6Hakkı Anıl AksoyNo ratings yet
- Reliability of Systems SEODocument18 pagesReliability of Systems SEOAvinash shreyNo ratings yet
- Reliability RajuDocument22 pagesReliability RajuTanvir ShakilNo ratings yet
- Ics 806-Week 2Document33 pagesIcs 806-Week 2mugambijim@gmail.comNo ratings yet
- UML InteractionsDocument64 pagesUML InteractionstchassidanielNo ratings yet
- Assignment No.1: Title: Study of Object Oriented ProgrammingDocument20 pagesAssignment No.1: Title: Study of Object Oriented ProgrammingSports ClubeNo ratings yet
- Consistency and Replication: Topics To Be CoveredDocument13 pagesConsistency and Replication: Topics To Be CoveredMahmud SultanNo ratings yet
- Uml Lab ManualDocument44 pagesUml Lab Manualnitinyennam88833% (3)
- Knowledge and ReasoningDocument17 pagesKnowledge and ReasoningMOVIETADKANo ratings yet
- AI (FSM, Behavior Tree, GOAP, Utility AI) - Nez Framework DocumentationDocument3 pagesAI (FSM, Behavior Tree, GOAP, Utility AI) - Nez Framework DocumentationAnna J BischoffNo ratings yet
- Modelling System Reliability Using Continuous-Time Markov ChainDocument4 pagesModelling System Reliability Using Continuous-Time Markov ChainjoyopsonNo ratings yet
- Safely Updating Running SoftwareDocument6 pagesSafely Updating Running SoftwarePeter EbraertNo ratings yet
- Rtos 1Document22 pagesRtos 1VariNo ratings yet
- Project Report of Operating SystemDocument14 pagesProject Report of Operating SystemDipika PatilNo ratings yet
- Representation, Known As Data FlowDocument7 pagesRepresentation, Known As Data Flowmswdalfakhry83No ratings yet
- VNX - VNX 5100 Procedures-Replacing A SFP in A SPDocument15 pagesVNX - VNX 5100 Procedures-Replacing A SFP in A SPWei LeeNo ratings yet
- Modeling Mechanical Systems in ScilabDocument7 pagesModeling Mechanical Systems in ScilabTonie Adrian DiamanteNo ratings yet
- Architectural Design of E1 Distributed Operating System: Leonid Ryzhik, Anton BurtsevDocument30 pagesArchitectural Design of E1 Distributed Operating System: Leonid Ryzhik, Anton BurtsevPrince OfdreamsNo ratings yet
- Run Containers Under SystemdDocument5 pagesRun Containers Under SystemdMohammed Babar AhmedNo ratings yet
- Reliability and Maintenance DecisionsDocument25 pagesReliability and Maintenance DecisionsinkCODENo ratings yet
- Use Case Model UML NotationDocument39 pagesUse Case Model UML Notationmarkeoneal100% (1)
- Chapter 4 SoftwareDocument24 pagesChapter 4 SoftwareMuhammad AounNo ratings yet
- Component-Based Software Engineering ObjectivesDocument9 pagesComponent-Based Software Engineering ObjectivesMyo Thi HaNo ratings yet
- RDS 81346-2 - Car ExampleDocument7 pagesRDS 81346-2 - Car ExampleyoonghmNo ratings yet
- EAM NoteDocument15 pagesEAM NotebuntyNo ratings yet
- Module 5Document30 pagesModule 5goatrip2024No ratings yet
- DBMS (Unit-3&4)Document25 pagesDBMS (Unit-3&4)divyanshi kansalNo ratings yet
- Consider A Setting Where We Have A Faulty Device Assume That The Failure Can Be Caused by ADocument1 pageConsider A Setting Where We Have A Faulty Device Assume That The Failure Can Be Caused by ACharlotteNo ratings yet
- Fuzzy Logic Applications To High Performance Drives With Special Reference To Reluctance MotorsDocument7 pagesFuzzy Logic Applications To High Performance Drives With Special Reference To Reluctance MotorsS Bharadwaj ReddyNo ratings yet
- Fundamentals of Asset Move FunctionalityDocument13 pagesFundamentals of Asset Move Functionalityalpha_kskNo ratings yet
- Hci Lesson 7Document5 pagesHci Lesson 7BabyjoyNo ratings yet
- ITPML32-FULLDocument104 pagesITPML32-FULLpushpamurugesan19622No ratings yet
- Lecture 2: Functions 1.5 Control: Wednesday, March 17, 2021 5:12 PMDocument6 pagesLecture 2: Functions 1.5 Control: Wednesday, March 17, 2021 5:12 PMRafael Romero SeNo ratings yet
- Mechanics of Machines: Motion Analysis of Reciprocating Engine ComponentsDocument11 pagesMechanics of Machines: Motion Analysis of Reciprocating Engine ComponentsM. TahmanNo ratings yet
- The Seven Samurai of Systems Engineering: Dealing With The Complexity of 7 Interrelated SystemsDocument11 pagesThe Seven Samurai of Systems Engineering: Dealing With The Complexity of 7 Interrelated SystemsincosewmaNo ratings yet
- An Experiment in Feature Engineering: Pamela ZaveDocument25 pagesAn Experiment in Feature Engineering: Pamela ZaveP6E7P7No ratings yet
- 10 Neural NetworksDocument12 pages10 Neural NetworksJiahong HeNo ratings yet
- Oops ShivaniDocument57 pagesOops ShivaniHari OmNo ratings yet
- oo'J..'E!Ver, : Made A LanquaqeDocument19 pagesoo'J..'E!Ver, : Made A LanquaqeLiz Mar CieloNo ratings yet
- 3 RequirementsDocument15 pages3 RequirementsDr. Sathiyavathi VNo ratings yet
- 5 - Retele de Perceptoni MultistratDocument29 pages5 - Retele de Perceptoni MultistratValentin MunteanuNo ratings yet
- Use Case Document: Created: Last Update: Print Date: By: DistributionDocument16 pagesUse Case Document: Created: Last Update: Print Date: By: DistributionDiego Andres Gamez TeranNo ratings yet
- Deep Transfer Learning Via Restricted Boltzmann Machine For Document ClassificationDocument4 pagesDeep Transfer Learning Via Restricted Boltzmann Machine For Document Classificationpascal toguNo ratings yet
- Assinment of Java TBDocument5 pagesAssinment of Java TBMukesh KumarNo ratings yet
- Assignment 2 - Report of Failure Probability of DesignDocument11 pagesAssignment 2 - Report of Failure Probability of Designnorerny shuhadaNo ratings yet
- Slug Flow: (Sample Model: Slug - Dat)Document7 pagesSlug Flow: (Sample Model: Slug - Dat)nrd9771No ratings yet
- Section Viii Div 1 Div 2 Div ComparisonDocument2 pagesSection Viii Div 1 Div 2 Div Comparisonapparaokr100% (5)
- DK598X_book_Accelerated_AgingDocument10 pagesDK598X_book_Accelerated_Agingnrd9771No ratings yet
- Reliability Over TimeDocument27 pagesReliability Over Timenrd9771No ratings yet
- Tape Coating 2Document7 pagesTape Coating 2nrd9771No ratings yet
- b15906 1Document21 pagesb15906 1nrd9771No ratings yet
- Ncode Designlife Brochure PDFDocument4 pagesNcode Designlife Brochure PDFnrd9771No ratings yet
- Nonparametric Statistical Methods for Reliability AnalysisDocument30 pagesNonparametric Statistical Methods for Reliability Analysisnrd9771No ratings yet
- b15906 6Document21 pagesb15906 6nrd9771No ratings yet
- b15906 4Document18 pagesb15906 4nrd9771No ratings yet
- Stellite PropertiesDocument2 pagesStellite Propertiesnrd9771No ratings yet
- Hot Service SpecsDocument3 pagesHot Service Specsnrd9771No ratings yet
- DK598X - Book - FM Page 1 Monday, January 24, 2005 11:11 PMDocument6 pagesDK598X - Book - FM Page 1 Monday, January 24, 2005 11:11 PMnrd9771No ratings yet
- Polyken 2019 PrimerDocument5 pagesPolyken 2019 Primernrd9771No ratings yet
- Ncode Designlife Brochure PDFDocument4 pagesNcode Designlife Brochure PDFnrd9771No ratings yet
- WSA 113 RC Pipe With Flexible TPL Issue 1Document31 pagesWSA 113 RC Pipe With Flexible TPL Issue 1NikeNo ratings yet
- 061110170425preview - CP 27-1999 Amd1Document6 pages061110170425preview - CP 27-1999 Amd1nrd9771No ratings yet
- Ductile IronDocument7 pagesDuctile Ironnrd9771No ratings yet
- Teadit - Solid Metallic GasketsDocument1 pageTeadit - Solid Metallic Gasketsnrd9771No ratings yet
- Al BR ProfileDocument1 pageAl BR Profilenrd9771No ratings yet
- Hose Air & Water GP300Document1 pageHose Air & Water GP300nrd9771No ratings yet
- Rosen Intel PigsDocument1 pageRosen Intel Pigsnrd9771No ratings yet
- Ductile IronDocument7 pagesDuctile Ironnrd9771No ratings yet
- Al BR ProfileDocument1 pageAl BR Profilenrd9771No ratings yet
- Flow LinesDocument1 pageFlow Linesnrd9771No ratings yet
- Tape Coating 2Document7 pagesTape Coating 2nrd9771No ratings yet
- Impact Test For CS MaterialDocument1 pageImpact Test For CS Materialnrd9771No ratings yet
- Ductile IronDocument7 pagesDuctile Ironnrd9771No ratings yet
- Field Installed Flanges Ss 202Document1 pageField Installed Flanges Ss 202nrd9771No ratings yet
- Acceptance Criteria Boiler (API 573)Document1 pageAcceptance Criteria Boiler (API 573)Nur Achmad BusairiNo ratings yet
- B.O Q Irrigation Items SAQQER ROAD - Xls FINALDocument1 pageB.O Q Irrigation Items SAQQER ROAD - Xls FINALDEEPAKNo ratings yet
- VAV CAV Documentation ADocument20 pagesVAV CAV Documentation AHarish Menon100% (1)
- Rickmeier - Gear Pump R25-16 PDFDocument48 pagesRickmeier - Gear Pump R25-16 PDFAdam Kowalski60% (5)
- Final PPT BpoDocument21 pagesFinal PPT BpoPradeepNo ratings yet
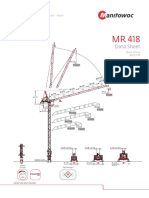
- MR418-FEM-Top Slewing Tower Cranes Imperial PDFDocument8 pagesMR418-FEM-Top Slewing Tower Cranes Imperial PDFCompass equipmentNo ratings yet
- O10/011/O16/O20 Single Pressure Control: Installation DataDocument4 pagesO10/011/O16/O20 Single Pressure Control: Installation DataMichael MartinNo ratings yet
- Consultants New Rates GR Dated 09.05.2019Document11 pagesConsultants New Rates GR Dated 09.05.2019Shakti SinghNo ratings yet
- 59E Agitator Seals in Chemical-En-18.09.2008Document24 pages59E Agitator Seals in Chemical-En-18.09.2008Daniel CostaNo ratings yet
- Clerk Cum Data Entry Operator Recruitment 2018Document25 pagesClerk Cum Data Entry Operator Recruitment 2018Pankaj VermaNo ratings yet
- 02 CNC Lab Manual NIT APDocument3 pages02 CNC Lab Manual NIT APDevesh RehanNo ratings yet
- 0 Delphi Labs DataSnap XE CallbacksDocument7 pages0 Delphi Labs DataSnap XE Callbacksduna tarimaNo ratings yet
- Iso 13485 Medical Devices 2016 PDFDocument12 pagesIso 13485 Medical Devices 2016 PDFDito PriyambodoNo ratings yet
- Panduit Electrical CatalogDocument1,040 pagesPanduit Electrical CatalognumnummoNo ratings yet
- Implement state machine diagram and develop activity diagram for pharmaceutical order management systemDocument1 pageImplement state machine diagram and develop activity diagram for pharmaceutical order management systemDaigree NadiaNo ratings yet
- Barden Speciality Products Us enDocument73 pagesBarden Speciality Products Us enjonasmcgee2345No ratings yet
- Data Sheet: INJECTO-COMPACT (IC) 1400/725VDocument2 pagesData Sheet: INJECTO-COMPACT (IC) 1400/725VJulian FraileNo ratings yet
- Engineering Tilt UpDocument334 pagesEngineering Tilt UpMTCLSNo ratings yet
- Part 1 Piping SystemsDocument22 pagesPart 1 Piping SystemsfacebookshopNo ratings yet
- Danfoss Saginomiya FQS - 1Document2 pagesDanfoss Saginomiya FQS - 1istorletNo ratings yet
- GITAM University Industrial Training ReportDocument6 pagesGITAM University Industrial Training ReportAkash RanjanNo ratings yet
- Oval DPR Overall For NGN ProjectDocument4 pagesOval DPR Overall For NGN ProjectRashmi Ranjan MohantyNo ratings yet
- EMSA MED-PrasentationDocument20 pagesEMSA MED-PrasentationCostin RotaruNo ratings yet
- CS Form No. 212 Attachment - Work Experience SheetDocument2 pagesCS Form No. 212 Attachment - Work Experience Sheetdominic kokoyNo ratings yet
- Panel Data Analysis Using EViews Chapter - 3 PDFDocument49 pagesPanel Data Analysis Using EViews Chapter - 3 PDFimohamed2No ratings yet
- Comandos OmniDocument3 pagesComandos OmniIoryogi KunNo ratings yet
- Systems Alliance: VPP 4.3.3: VISA Implementation Specification For The G LanguageDocument53 pagesSystems Alliance: VPP 4.3.3: VISA Implementation Specification For The G LanguageNeneFINo ratings yet
- Regulador Voltage 3.3v Xbox360Document18 pagesRegulador Voltage 3.3v Xbox360ignorameNo ratings yet
- Programmable Controllers: FX CpuDocument60 pagesProgrammable Controllers: FX CpuHasan ShahariarNo ratings yet
- Absorption&Insulation DataDocument26 pagesAbsorption&Insulation Dataharoub_nasNo ratings yet