You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
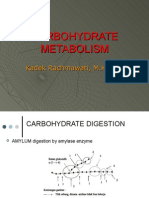
- Carbohydrate MetabolismDocument38 pagesCarbohydrate Metabolismwidya nurrohmanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Indian Oil Corporation LTD Guwahati RefineryDocument27 pagesIndian Oil Corporation LTD Guwahati Refineryelectram67% (6)
- Ellenberger - Psychiatry From Ancient To Modern TimesDocument76 pagesEllenberger - Psychiatry From Ancient To Modern TimesSiegfriedCristoforNo ratings yet
- Iep CritiqueDocument11 pagesIep Critiqueapi-357058154No ratings yet
- (Intelligent Systems, Control and Automation_ Science and Engineering 72) B. S. Goh, W. J. Leong, K. L. Teo (Auth.), Honglei Xu, Xiangyu Wang (Eds.)-Optimization and Control Methods in Industrial EngiDocument300 pages(Intelligent Systems, Control and Automation_ Science and Engineering 72) B. S. Goh, W. J. Leong, K. L. Teo (Auth.), Honglei Xu, Xiangyu Wang (Eds.)-Optimization and Control Methods in Industrial EngiVu Duc TruongNo ratings yet
- Teacher Induction Program Module 2Document54 pagesTeacher Induction Program Module 2Acee Lagarto75% (8)
- Waste Segregator ReportDocument33 pagesWaste Segregator ReportVinodNKumar25% (4)
- Chapter 9:: Frequency Domain Analysis of Dynamic SystemsDocument11 pagesChapter 9:: Frequency Domain Analysis of Dynamic SystemsinnoodiraNo ratings yet
- Inno2018 CE I MET4 LinearizationDocument9 pagesInno2018 CE I MET4 LinearizationinnoodiraNo ratings yet
- Inno2018 - EMT2502 - VIBRATIONS - Damped MDOF PDFDocument5 pagesInno2018 - EMT2502 - VIBRATIONS - Damped MDOF PDFinnoodiraNo ratings yet
- Inno2018 Emt2502 Vibrations Damped MdofDocument5 pagesInno2018 Emt2502 Vibrations Damped MdofinnoodiraNo ratings yet
- Inno2018 CE I MET4 ModellingDocument12 pagesInno2018 CE I MET4 ModellinginnoodiraNo ratings yet
- Inno2018 EMT2502 VIBRATIONS Natural Freq and ModesDocument8 pagesInno2018 EMT2502 VIBRATIONS Natural Freq and ModesinnoodiraNo ratings yet
- Inno2018 Emt2502 Vibrations Undamped MdofDocument8 pagesInno2018 Emt2502 Vibrations Undamped MdofinnoodiraNo ratings yet
- Robust Control IssuesDocument61 pagesRobust Control IssuesinnoodiraNo ratings yet
- Inno2018 - EMT2502 - VIBRATIONS - Natural Freq and Modes PDFDocument8 pagesInno2018 - EMT2502 - VIBRATIONS - Natural Freq and Modes PDFinnoodiraNo ratings yet
- Inno2018 Emt2502 Vibrations Free Vibration SdofDocument15 pagesInno2018 Emt2502 Vibrations Free Vibration SdofinnoodiraNo ratings yet
- Monocular LasaerDocument5 pagesMonocular LasaerinnoodiraNo ratings yet
- Engineering Drawing & DesignDocument38 pagesEngineering Drawing & DesigninnoodiraNo ratings yet
- Adaptive Real-Time Road Detection Using Neural NetworksDocument6 pagesAdaptive Real-Time Road Detection Using Neural NetworksinnoodiraNo ratings yet
- Control System QBDocument29 pagesControl System QBPrabhavathi AadhiNo ratings yet
- Mechanics of Deformable Bodies Module 6Document65 pagesMechanics of Deformable Bodies Module 6stephaniejeancortez522No ratings yet
- Foundation of Computing Systems: Linked ListsDocument28 pagesFoundation of Computing Systems: Linked ListsAnand BiradarNo ratings yet
- ONLINE20042111 MoDocument16 pagesONLINE20042111 MoPhương HoàngNo ratings yet
- Vxworks Kernel Programmers Guide 6.8Document802 pagesVxworks Kernel Programmers Guide 6.8hisahinNo ratings yet
- GulfSea HT Oil 32 PDFDocument1 pageGulfSea HT Oil 32 PDFObydur RahmanNo ratings yet
- My Black BookDocument5 pagesMy Black BookRiSHI KeSH GawaINo ratings yet
- ENFSIDocument8 pagesENFSIkmrdNo ratings yet
- Arrays in C++Document13 pagesArrays in C++weggie alcarazNo ratings yet
- If You Can Keep Your Head When All About YouDocument3 pagesIf You Can Keep Your Head When All About YouxabiersuarezNo ratings yet
- Ex 5308-Alexandra Thedeby-Heating and Cooling With Solar Powered Peltier ElementsDocument93 pagesEx 5308-Alexandra Thedeby-Heating and Cooling With Solar Powered Peltier ElementsMohammad NaufalNo ratings yet
- MGT602 Quiz 2 290411Document8 pagesMGT602 Quiz 2 290411sonutilkNo ratings yet
- Genetic Structuralism by Group 6Document7 pagesGenetic Structuralism by Group 6Achmad AlghifariNo ratings yet
- Updating Cd2 School Heads: TradeanDocument2 pagesUpdating Cd2 School Heads: TradeanCarlos GarciaNo ratings yet
- Younified LevelupDocument9 pagesYounified LevelupMitesh NagpalNo ratings yet
- Advertisement and Sponsorship-Price ListDocument4 pagesAdvertisement and Sponsorship-Price ListzulkiplyNo ratings yet
- Becoming A Rhetor - Adora CurryDocument3 pagesBecoming A Rhetor - Adora CurryAdora CurryNo ratings yet
- J.petrauskas ResumeDocument1 pageJ.petrauskas ResumeJPet09No ratings yet
- Jurutera August 2014Document28 pagesJurutera August 2014Edison LimNo ratings yet
- Active & Passive Voice Lesson Plan: Create A Cartoon in Active or Passive VoiceDocument3 pagesActive & Passive Voice Lesson Plan: Create A Cartoon in Active or Passive VoiceHanie Balmedina-RazoNo ratings yet
- Challenges To FreedomDocument11 pagesChallenges To Freedomgerlie orqueNo ratings yet
- Mewaruniversity PH DDocument4 pagesMewaruniversity PH Dpramoddutta100% (1)
- 2690 2 2023 PDFDocument12 pages2690 2 2023 PDFDevesh Kumar PandeyNo ratings yet