You might also like
- Applied ElectronicsDocument37 pagesApplied ElectronicsGuruKPO100% (2)
- Neural Networks: 1.1 What Is A Neural Network ?Document12 pagesNeural Networks: 1.1 What Is A Neural Network ?Aazim YashwanthNo ratings yet
- Artificial Neural Networks: Fundamentals and Applications for Decoding the Mysteries of Neural ComputationFrom EverandArtificial Neural Networks: Fundamentals and Applications for Decoding the Mysteries of Neural ComputationNo ratings yet
- Lighting Illumination LevelsDocument13 pagesLighting Illumination LevelsAhmed Hanae Kassem100% (2)
- 5 Ways I Bypassed Your Web Application Firewall (WAF)Document18 pages5 Ways I Bypassed Your Web Application Firewall (WAF)JOSÉ IGNACIO PARRA VALENZUELA100% (1)
- K - FactorTransformerDocument5 pagesK - FactorTransformerAnonymous BanTco100% (1)
- Neural Network and Fuzzy LogicDocument46 pagesNeural Network and Fuzzy Logicdoc. safe eeNo ratings yet
- Artificial Neural NetworkDocument8 pagesArtificial Neural NetworkRoyalRon Yoga PrabhuNo ratings yet
- Introduction To Neural NetworksDocument51 pagesIntroduction To Neural NetworkssuryaNo ratings yet
- Seminar On Artificial Neural Networks ReportDocument24 pagesSeminar On Artificial Neural Networks ReportRobel AsfawNo ratings yet
- A Basic Introduction To Neural NetworksDocument23 pagesA Basic Introduction To Neural NetworksDennis Ebenezer DhanarajNo ratings yet
- Neural Networks: Tricea Wade (99-002187) Swain Henry (02-006844)Document11 pagesNeural Networks: Tricea Wade (99-002187) Swain Henry (02-006844)Sreeraj JayarajNo ratings yet
- ANN Seminar TopicDocument27 pagesANN Seminar TopicJajula YashwanthdattaNo ratings yet
- Research Paper On Artificial Neural NetworkDocument6 pagesResearch Paper On Artificial Neural Networkwtdcxtbnd100% (1)
- Neural Network Research Paper PDFDocument6 pagesNeural Network Research Paper PDFfvgbhswf100% (1)
- Nonlinear, and Parallel Computer (Information-Processing System) - It Has The Capability ToDocument6 pagesNonlinear, and Parallel Computer (Information-Processing System) - It Has The Capability Toİsmail KıyıcıNo ratings yet
- Long Short Term Memory: Fundamentals and Applications for Sequence PredictionFrom EverandLong Short Term Memory: Fundamentals and Applications for Sequence PredictionNo ratings yet
- Research Paper On Application of Neural NetworkDocument6 pagesResearch Paper On Application of Neural Networkcats1yax100% (1)
- Artificial Neural NetworksDocument25 pagesArtificial Neural NetworksManoj Kumar SNo ratings yet
- Intro to Neural Networks: Understanding NN FundamentalsDocument5 pagesIntro to Neural Networks: Understanding NN FundamentalsLevi BahlmannNo ratings yet
- (ANN) Neural Nets Intro (Frohlich)Document24 pages(ANN) Neural Nets Intro (Frohlich)johnsmithxxNo ratings yet
- Introduction To ANNDocument14 pagesIntroduction To ANNShahzad Karim KhawerNo ratings yet
- Soft Computing: Project ReportDocument54 pagesSoft Computing: Project ReportShūbhåm ÑagayaÇhNo ratings yet
- 10 Myths About Neutral NetworksDocument10 pages10 Myths About Neutral NetworksNialish KhanNo ratings yet
- Artificial Neural Network DissertationDocument8 pagesArtificial Neural Network DissertationPayToDoMyPaperDurham100% (1)
- Artificial Neural Networks: A Seminar Report OnDocument13 pagesArtificial Neural Networks: A Seminar Report OnShiv KumarNo ratings yet
- Richard D. de Veaux Lyle H. Ungar Williams College University of PennsylvaniaDocument29 pagesRichard D. de Veaux Lyle H. Ungar Williams College University of PennsylvaniajagruthimsNo ratings yet
- Artificial Neural Network Thesis TopicsDocument4 pagesArtificial Neural Network Thesis Topicskatyallenrochester100% (2)
- What is a Neural NetworkDocument3 pagesWhat is a Neural Networkram179No ratings yet
- Recurrent Neural NetworkDocument11 pagesRecurrent Neural NetworkfanNo ratings yet
- Master Thesis Neural NetworkDocument4 pagesMaster Thesis Neural Networktonichristensenaurora100% (1)
- Manual For Soft ComputingDocument13 pagesManual For Soft ComputingVinay SahuNo ratings yet
- Contents:: 1. Introduction To Neural NetworksDocument27 pagesContents:: 1. Introduction To Neural NetworksKarthik VanamNo ratings yet
- UNIT4Document13 pagesUNIT4Ayush NighotNo ratings yet
- Artificial Neural NetworksDocument12 pagesArtificial Neural NetworksBhargav Cho ChweetNo ratings yet
- Ann FileDocument49 pagesAnn Filerohit148inNo ratings yet
- Feedforward Neural NetworkDocument5 pagesFeedforward Neural NetworkSreejith MenonNo ratings yet
- Ijser: Artificial Neural NetworkDocument6 pagesIjser: Artificial Neural NetworkShashi KumarNo ratings yet
- Synopsis NUERAL NETWORKDocument1 pageSynopsis NUERAL NETWORKDynamic RefrigerationsNo ratings yet
- PHD Thesis On Artificial Neural NetworksDocument8 pagesPHD Thesis On Artificial Neural Networksprdezlief100% (1)
- Neural NetworksDocument12 pagesNeural NetworksP PNo ratings yet
- Neural NetworksDocument6 pagesNeural Networksdavidmaya2006No ratings yet
- Chapter 10. Neural Networks: "You Can't Process Me With A Normal Brain." - Charlie SheenDocument54 pagesChapter 10. Neural Networks: "You Can't Process Me With A Normal Brain." - Charlie SheenHassan AliNo ratings yet
- Artificial IntelligentDocument23 pagesArtificial Intelligentmohanad_j_jindeelNo ratings yet
- Feedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsFrom EverandFeedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsNo ratings yet
- An Introduction To BackDocument4 pagesAn Introduction To BackDinesh SundarNo ratings yet
- DL Unit 1Document16 pagesDL Unit 1nitinNo ratings yet
- Minin HandoutDocument13 pagesMinin HandoutDimas Bagus Cahyaningrat. WNo ratings yet
- Research Paper Topics On Artificial Neural NetworksDocument5 pagesResearch Paper Topics On Artificial Neural Networkshydip1k1vif3No ratings yet
- Artificial Neural NetworksDocument4 pagesArtificial Neural NetworksZUHAL MUJADDID SAMASNo ratings yet
- Seminar On Artificial Neural NetworkDocument17 pagesSeminar On Artificial Neural NetworkMohit RanaNo ratings yet
- MTR607 Chapter 0Document74 pagesMTR607 Chapter 0Sai PrasanNo ratings yet
- Introduction To Neural NetworksDocument51 pagesIntroduction To Neural NetworksAayush PatidarNo ratings yet
- Neural NetworksDocument47 pagesNeural Networksshilpa.1595No ratings yet
- Machine Learning: Version 2 CSE IIT, KharagpurDocument5 pagesMachine Learning: Version 2 CSE IIT, KharagpurVanu ShaNo ratings yet
- Neural Network Research Papers PDFDocument5 pagesNeural Network Research Papers PDFfys1q18y100% (1)
- Chapter 01 Introduction To Neural NetworksDocument9 pagesChapter 01 Introduction To Neural Networksmssaramalik13No ratings yet
- Introduction To Neural Networks 1.1 What Is A Neural Network?Document3 pagesIntroduction To Neural Networks 1.1 What Is A Neural Network?Halid KumandanNo ratings yet
- Artificial or Human? Neural Networks ExplainedDocument21 pagesArtificial or Human? Neural Networks ExplainedabdulrahmanNo ratings yet
- Neural Networks and Their Statistical ApplicationDocument41 pagesNeural Networks and Their Statistical ApplicationkamjulajayNo ratings yet
- Introduction to Neural Networks: How Biological Neurons Work and Artificial Neural Networks Are ProgrammedDocument6 pagesIntroduction to Neural Networks: How Biological Neurons Work and Artificial Neural Networks Are Programmedsumathi gnanasekaranNo ratings yet
- Artificial Neural NetworksDocument9 pagesArtificial Neural Networksm_pandeeyNo ratings yet
- Introduction to Neural Networks in 40 CharactersDocument3 pagesIntroduction to Neural Networks in 40 CharactersMakrand BallalNo ratings yet
- Hand Written Character Recognition Using Back Propagation NetworkDocument13 pagesHand Written Character Recognition Using Back Propagation NetworkMegan TaylorNo ratings yet
- Dian Approximate Optimizer PDFDocument14 pagesDian Approximate Optimizer PDFtamann2004No ratings yet
- Effects of HarmonicsDocument4 pagesEffects of Harmonicstamann2004No ratings yet
- FFSQP Manual PDFDocument46 pagesFFSQP Manual PDFtamann2004No ratings yet
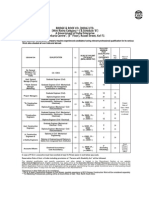
- Quality Objectives - E 091201 PDFDocument1 pageQuality Objectives - E 091201 PDFtamann2004No ratings yet
- SymbolsDocument6 pagesSymbolsAamir ShahzadNo ratings yet
- G Harmonics IntroductionDocument4 pagesG Harmonics IntroductionGary GohNo ratings yet
- StatisticsDocument42 pagesStatisticstamann2004No ratings yet
- Series Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission LinesDocument3 pagesSeries Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission Linestamann2004No ratings yet
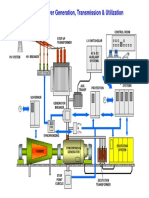
- توليد وإستخدامDocument1 pageتوليد وإستخدامtamann2004100% (1)
- Chapter 3Document21 pagesChapter 3selarothetsNo ratings yet
- Understanding HarmonicsDocument5 pagesUnderstanding HarmonicsjhaNo ratings yet
- Ijater 04 22 PDFDocument6 pagesIjater 04 22 PDFtamann2004No ratings yet
- Harmonic PDFDocument56 pagesHarmonic PDFtamann2004No ratings yet
- FilterDocument17 pagesFilternader_94No ratings yet
- Chapter 1. Introduction Understanding Power System HarmonicsDocument2 pagesChapter 1. Introduction Understanding Power System HarmonicsKish KhiradkNo ratings yet
- Cinar Kayakutlu Daim 2010 Development of Future Energy Scenarios With Intelligent Algorithms Case of Hydro in Turkey PDFDocument6 pagesCinar Kayakutlu Daim 2010 Development of Future Energy Scenarios With Intelligent Algorithms Case of Hydro in Turkey PDFtamann2004No ratings yet
- Chapter 1. Introduction Understanding Power System HarmonicsDocument2 pagesChapter 1. Introduction Understanding Power System HarmonicsKish KhiradkNo ratings yet
- Standards FOR Integrated Street Lighting Project FOR Delhi: Revision: 1Document55 pagesStandards FOR Integrated Street Lighting Project FOR Delhi: Revision: 1Neri ValeroNo ratings yet
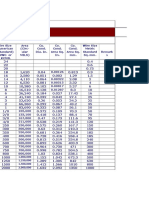
- AMERICAN & METERING STANDARD CABLES SIZE-finalDocument1 pageAMERICAN & METERING STANDARD CABLES SIZE-finaltamann2004No ratings yet
- FilterDocument17 pagesFilternader_94No ratings yet
- Seasonality: T T T TDocument38 pagesSeasonality: T T T Ttamann2004No ratings yet
- Paper 3-Fuzzy Controller Design Using FPGA For Photovoltaic Maximum Power Point TrackingDocument8 pagesPaper 3-Fuzzy Controller Design Using FPGA For Photovoltaic Maximum Power Point Trackingtamann2004No ratings yet
- Noise Pollution PDFDocument32 pagesNoise Pollution PDFHassan AliNo ratings yet
- DDOT Street Lighting Manual Chapter on Design and Layout CriteriaDocument24 pagesDDOT Street Lighting Manual Chapter on Design and Layout Criteriatamann2004No ratings yet
- TARIFFSDocument32 pagesTARIFFStamann2004No ratings yet
- Series Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission LinesDocument3 pagesSeries Capacitors Are Generally Applied To Compensate The Excessive Inductance of Long Transmission Linestamann2004No ratings yet
- Eca Power Factor Bro v5 PDFDocument8 pagesEca Power Factor Bro v5 PDFtamann2004No ratings yet
- Stud Finder Final v1Document6 pagesStud Finder Final v1api-323825539No ratings yet
- STS ExamDocument11 pagesSTS ExamKarl LintanNo ratings yet
- Whole Column Solution 1 Formula Solution King County Zip Codes Count in Each Zip Code - Total at Bottom How Many Records Match King County Zip CodesDocument110 pagesWhole Column Solution 1 Formula Solution King County Zip Codes Count in Each Zip Code - Total at Bottom How Many Records Match King County Zip CodesAnang WiryokoNo ratings yet
- F01 BMW Night Vision 2Document22 pagesF01 BMW Night Vision 2Phan VănNo ratings yet
- GXP Usermanual EnglishDocument44 pagesGXP Usermanual EnglishKatherine Nicole LinqueoNo ratings yet
- Ashish Ajit Singh Resume - (23!03!2021)Document7 pagesAshish Ajit Singh Resume - (23!03!2021)ashish singhNo ratings yet
- VIG Node ReplacementDocument8 pagesVIG Node ReplacementNooruddin DeroNo ratings yet
- Manually Configure Devices by Using Device Manager: Windows XPDocument4 pagesManually Configure Devices by Using Device Manager: Windows XPlucky_4u15No ratings yet
- TAD941GEDocument2 pagesTAD941GEjesus silvaNo ratings yet
- Microsoft GP 10 (VSTDGPProgrammersGuide)Document120 pagesMicrosoft GP 10 (VSTDGPProgrammersGuide)Atif RehmanNo ratings yet
- Lean manufacturing waste identification using COMMWIPDocument3 pagesLean manufacturing waste identification using COMMWIPSandeep ChallaNo ratings yet
- GymnaUniphy Pulson 330 Ultrasound Therapy - Service ManualDocument49 pagesGymnaUniphy Pulson 330 Ultrasound Therapy - Service Manualhugo david maldonadoNo ratings yet
- Case Study: Ikea: - Virtual and Augmented RealityDocument2 pagesCase Study: Ikea: - Virtual and Augmented RealityHaroon ZaheerNo ratings yet
- B&R Construction Company Job OpeningsDocument9 pagesB&R Construction Company Job OpeningsroopavijaykumarNo ratings yet
- Bimos Ii 8-Bit Serial-Input, Latched Drivers: Absolute Maximum Ratings at 25 C Free-Air TemperatureDocument7 pagesBimos Ii 8-Bit Serial-Input, Latched Drivers: Absolute Maximum Ratings at 25 C Free-Air TemperatureAlexNo ratings yet
- MY1050a-P 1Document74 pagesMY1050a-P 1Thug FamilyNo ratings yet
- Automatic Transmission / Trans: PreparationDocument2 pagesAutomatic Transmission / Trans: PreparationRodrigo RubioNo ratings yet
- Installation Guide Alcatel 1350 Management Suite 1350 Rel.7.4 Network ReleaseDocument184 pagesInstallation Guide Alcatel 1350 Management Suite 1350 Rel.7.4 Network ReleaseFarhad NaderianNo ratings yet
- Avionics - QBDocument5 pagesAvionics - QBVeeramani ShankarNo ratings yet
- Advanced Computer Network (22520) : A Laboratory Manual ForDocument137 pagesAdvanced Computer Network (22520) : A Laboratory Manual ForPratik IngleNo ratings yet
- Data WranglingDocument30 pagesData WranglingYashwanth YashuNo ratings yet
- Generate email addresses from namesDocument1 pageGenerate email addresses from namesJesús SJ Rivera CNo ratings yet
- Cyber-Security and Challenges Its Development in IndonesiaDocument5 pagesCyber-Security and Challenges Its Development in IndonesiaNaila KamalikaNo ratings yet
- Envirotainer Releyer RLP Container Tech SpecsDocument3 pagesEnvirotainer Releyer RLP Container Tech Specstsboy89No ratings yet
- Dokumen - Tips Cardioline Ar 1200 Service Manual (07!05!2020)Document38 pagesDokumen - Tips Cardioline Ar 1200 Service Manual (07!05!2020)juniorNo ratings yet
- MSO4000B and DPO4000B Oscilloscope User Manual 071281004 Rev ADocument229 pagesMSO4000B and DPO4000B Oscilloscope User Manual 071281004 Rev AhantaoNo ratings yet
- Practical Circuits: Exercise 12.2 Using the Internal Resistance EquationsDocument2 pagesPractical Circuits: Exercise 12.2 Using the Internal Resistance EquationsKaren MartinNo ratings yet
- Enforcer Implementation Guide SNAC11.0.5Document422 pagesEnforcer Implementation Guide SNAC11.0.5Mohammed SemmourNo ratings yet