You might also like
- GTC Express Itseez Opencv Webinar PDFDocument35 pagesGTC Express Itseez Opencv Webinar PDFazazel17No ratings yet
- Sc11 Cuda C BasicsDocument68 pagesSc11 Cuda C BasicsPoncho CoetoNo ratings yet
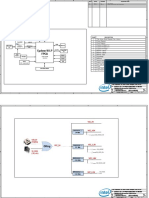
- c10lp Eval A1 SCHDocument56 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- C For MathematiciansDocument41 pagesC For MathematicianschinssuNo ratings yet
- Lee-Enfield Rifle RF Short MksI and II (II)Document4 pagesLee-Enfield Rifle RF Short MksI and II (II)VienNgocQuangNo ratings yet
- c10lp Eval A1 SCHDocument17 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- c10lp Eval A1 SCHDocument17 pagesc10lp Eval A1 SCHVienNgocQuangNo ratings yet
- E911 Provisioning System Software Test PlanDocument11 pagesE911 Provisioning System Software Test PlanVienNgocQuangNo ratings yet
- Workshop Manual (Eng-Rus)Document40 pagesWorkshop Manual (Eng-Rus)VienNgocQuangNo ratings yet
- OpenCV Introduction: Getting Started with Image ProcessingDocument29 pagesOpenCV Introduction: Getting Started with Image ProcessingVienNgocQuang100% (1)
- Role Profile Teaching Assistant HCMCDocument4 pagesRole Profile Teaching Assistant HCMCVienNgocQuangNo ratings yet
- ch2 PDFDocument6 pagesch2 PDFVienNgocQuangNo ratings yet
- MP 2Document3 pagesMP 2VienNgocQuangNo ratings yet
- T-34 in Angola 1970s 1980s - WwiiafterwwiiDocument24 pagesT-34 in Angola 1970s 1980s - WwiiafterwwiiVienNgocQuang100% (1)
- The Silenced de Lisle Commando CarbineDocument6 pagesThe Silenced de Lisle Commando CarbineVienNgocQuang100% (1)
- Cam Total WarDocument142 pagesCam Total WarVienNgocQuangNo ratings yet
- Lee-Enfield Rifle 22RF Pattern 14Document5 pagesLee-Enfield Rifle 22RF Pattern 14VienNgocQuangNo ratings yet
- Industrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)Document1 pageIndustrial Sensors (Electromagnetic Flowmeter, Density (Consistency) Meter, Pressure Transmitter and Water Treatment Analyzer)VienNgocQuangNo ratings yet
- People Republic of KampucheaDocument129 pagesPeople Republic of KampucheaVienNgocQuangNo ratings yet
- MP 1Document4 pagesMP 1VienNgocQuangNo ratings yet
- MP 3Document3 pagesMP 3VienNgocQuangNo ratings yet
- Angle Iload Uload IsDocument10 pagesAngle Iload Uload IsVienNgocQuangNo ratings yet
- DllmeDocument1 pageDllmeVienNgocQuangNo ratings yet
- Facial Feature Extraction and Pose DeterminationDocument20 pagesFacial Feature Extraction and Pose DeterminationVienNgocQuangNo ratings yet
- JM 154Document226 pagesJM 154VienNgocQuangNo ratings yet
- Summary and Future WorkDocument2 pagesSummary and Future WorkVienNgocQuangNo ratings yet
- Khmer Rouge Division 703Document216 pagesKhmer Rouge Division 703VienNgocQuang100% (1)
- SummaryDocument1 pageSummaryVienNgocQuangNo ratings yet
- TOSHIBA Global Internship 2018 - Application Guidelines & Position ListDocument17 pagesTOSHIBA Global Internship 2018 - Application Guidelines & Position ListVienNgocQuangNo ratings yet
- FN 98 Mauser Model 98 Rifle Operators ManualDocument28 pagesFN 98 Mauser Model 98 Rifle Operators ManualAdam Ward100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Lab Scope Certificate ISO 17025-2017Document33 pagesLab Scope Certificate ISO 17025-2017Khan SattrakulvongNo ratings yet
- SuppositoriesDocument66 pagesSuppositoriesSolomonNo ratings yet
- Algologicalmerida Ionescu Et AlDocument17 pagesAlgologicalmerida Ionescu Et AlRaed AwwadNo ratings yet
- Building Technology 4 Week 4Document42 pagesBuilding Technology 4 Week 4Xette FajardoNo ratings yet
- 20 Reefer Container Ij ContainerDocument32 pages20 Reefer Container Ij ContainerElvisor Visor100% (1)
- Part A1 Chapter 2 - ASME Code Calculations Stayed Surfaces Safety Valves FurnacesDocument25 pagesPart A1 Chapter 2 - ASME Code Calculations Stayed Surfaces Safety Valves Furnacesfujiman35100% (1)
- Grade8 UseDocument31 pagesGrade8 UseSabino Alfonso RalaNo ratings yet
- Humanities - The World We Live in - Geography Handout 1Document18 pagesHumanities - The World We Live in - Geography Handout 1denny_sitorusNo ratings yet
- Weekly Home Learning Plan Gen MathDocument2 pagesWeekly Home Learning Plan Gen MathLeizel Jane LjNo ratings yet
- Hindi Books for Overman, Sardar EtcDocument4 pagesHindi Books for Overman, Sardar EtcMd shahbaz64% (14)
- Assessment of Water Resources Pollution Associated With Mining ActivityDocument13 pagesAssessment of Water Resources Pollution Associated With Mining ActivityVictor Gallo RamosNo ratings yet
- CKY) Cocke-Kasami-Younger) Earley Parsing Algorithms: Dor AltshulerDocument81 pagesCKY) Cocke-Kasami-Younger) Earley Parsing Algorithms: Dor AltshulerViorel BotnariNo ratings yet
- Laser Theodolite ManualDocument24 pagesLaser Theodolite Manualp2342No ratings yet
- EBS e PDFDocument92 pagesEBS e PDFRowan Cornelius100% (2)
- Automating commercial insurance data intake with a metamodel-driven solutionDocument5 pagesAutomating commercial insurance data intake with a metamodel-driven solutionSachin ShingoteNo ratings yet
- Lecture2 KlayoutDocument55 pagesLecture2 KlayoutSneha S RevankarNo ratings yet
- Flotrac Algorithm White PaperDocument4 pagesFlotrac Algorithm White PaperAnestesia 2017 UDECNo ratings yet
- Bubble Lab ExerciseDocument9 pagesBubble Lab ExerciseRic Anthony LayasanNo ratings yet
- Preparation of Sample For AnalysisDocument27 pagesPreparation of Sample For Analysisapi-26215965100% (2)
- Analyzing Network Traffic with TSharkDocument46 pagesAnalyzing Network Traffic with TSharkJay SingireddyNo ratings yet
- CBSE Ryan International School Assessment-2Document5 pagesCBSE Ryan International School Assessment-2itztonyNo ratings yet
- Kiln Operation Basics: Pyroprocessing 1Document56 pagesKiln Operation Basics: Pyroprocessing 1mustafNo ratings yet
- SssDocument24 pagesSssSaFdaR QaZiNo ratings yet
- EtherWAN EX35080-00B Data SheetDocument4 pagesEtherWAN EX35080-00B Data SheetJMAC SupplyNo ratings yet
- X28HC256Document25 pagesX28HC256schwagerino100% (1)
- PPTDocument19 pagesPPTSumit Kashyap100% (1)
- IntertekWhitepaper Surface Area and Porosity Pharmaceutical PDFDocument7 pagesIntertekWhitepaper Surface Area and Porosity Pharmaceutical PDFJosé Antonio Michea GonzalezNo ratings yet
- Types of distributed computing in 40 charactersDocument8 pagesTypes of distributed computing in 40 charactersAiman FatimaNo ratings yet
- Chapter 1Document35 pagesChapter 1Isagani AlonzoNo ratings yet
- Spacecraft and Mission DesignDocument10 pagesSpacecraft and Mission DesignluciopatricioNo ratings yet