You might also like
- TD Trains Epicycloidaux PDFDocument3 pagesTD Trains Epicycloidaux PDFHechmi Chermiti100% (2)
- Exo2 - Composition Des MouvementsDocument6 pagesExo2 - Composition Des MouvementsToufikJalalEddineNo ratings yet
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- Cinématique Graphique Application - Commande Soupape Simple Et Avec CulbuteurDocument5 pagesCinématique Graphique Application - Commande Soupape Simple Et Avec CulbuteurbrunodupreNo ratings yet
- Correction Chapes Applications Dessin+de+definition Coupesimple 2012 2AS NetDocument3 pagesCorrection Chapes Applications Dessin+de+definition Coupesimple 2012 2AS Netchaouch.najehNo ratings yet
- Rapport Be2 G33Document72 pagesRapport Be2 G33RIVALDO JUNINHO ZINEDINE ADIKPETONo ratings yet
- TD Boite de CommandeDocument2 pagesTD Boite de CommandeYoussef Trimech100% (1)
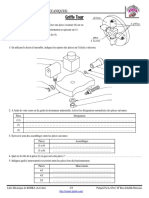
- Griffe de Tour PDFDocument3 pagesGriffe de Tour PDFAdramé AdraméNo ratings yet
- Thème 1 - Poulie Redex-1Document1 pageThème 1 - Poulie Redex-1Anime forever 20160% (1)
- Boite de VitesseDocument8 pagesBoite de VitesseHamami AymenNo ratings yet
- Examens National 2bac Sci Genieur SMB 2017 R PDFDocument32 pagesExamens National 2bac Sci Genieur SMB 2017 R PDFHanane TounsiNo ratings yet
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFDocument5 pagesDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- CPAV-Ex2 Emb-Frein PDFDocument5 pagesCPAV-Ex2 Emb-Frein PDFHanane TounsiNo ratings yet
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZINo ratings yet
- Pro 2017Document14 pagesPro 2017Crazy ytNo ratings yet
- Contrôle de Mécanique Embrayage Frein Limiteur de CoupleDocument6 pagesContrôle de Mécanique Embrayage Frein Limiteur de CoupleMeryemHmouriNo ratings yet
- TD EmbDocument5 pagesTD EmbFARES Naoufel100% (1)
- Support Cours VTTDocument8 pagesSupport Cours VTTNadia Dridi100% (1)
- AccouplementDocument32 pagesAccouplementTimo ShmittNo ratings yet
- TdengrenageDocument5 pagesTdengrenageImane FarrassNo ratings yet
- Cours Roues de Friction Poulies Et Courroies Roues Et ChainesDocument7 pagesCours Roues de Friction Poulies Et Courroies Roues Et ChainesC'est YanaNo ratings yet
- TD 4 Loi Entrée Sortie Par Fermeture CinématiqueDocument2 pagesTD 4 Loi Entrée Sortie Par Fermeture CinématiqueAb DouNo ratings yet
- CIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFDocument6 pagesCIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFBouslama NNo ratings yet
- Sujet-Janvier 2019 - Machine D'essai Mécanique PDFDocument20 pagesSujet-Janvier 2019 - Machine D'essai Mécanique PDFMrnadhir MecaniqueNo ratings yet
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDocument14 pagesChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsNo ratings yet
- AssemblagesDocument7 pagesAssemblagesAdouni ZakNo ratings yet
- Accouplement Cours PDFDocument4 pagesAccouplement Cours PDFboujbalNo ratings yet
- StatiqueDocument5 pagesStatiqueAdje EKLOUNo ratings yet
- TD FreinDocument5 pagesTD FreinHamami AymenNo ratings yet
- TD 17 Corrigé - Liaisons ÉquivalentesDocument6 pagesTD 17 Corrigé - Liaisons ÉquivalentesJawad Hamriti50% (2)
- Les Embrayages1Document14 pagesLes Embrayages1Ghayth BouzayaniNo ratings yet
- Sujet-Bac GM 2001Document19 pagesSujet-Bac GM 2001Ali TrikiNo ratings yet
- Evaluation Transmission eDocument2 pagesEvaluation Transmission echrisNo ratings yet
- EngrenageDocument33 pagesEngrenagechaouch.najehNo ratings yet
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedNo ratings yet
- 1-Le Schéma Cinématique Des MécanismesDocument8 pages1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyNo ratings yet
- 01 Bac 2008 Princpale CorrigéDocument9 pages01 Bac 2008 Princpale CorrigéMohamed AbedNo ratings yet
- Guidage Rotation App4Document4 pagesGuidage Rotation App4Oussama MabroukNo ratings yet
- Exercice Engrenages Revision eDocument1 pageExercice Engrenages Revision eakou100% (1)
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57No ratings yet
- Examen Theorie Des Mécanismes 2016 (Solution)Document3 pagesExamen Theorie Des Mécanismes 2016 (Solution)Abdou EssamyNo ratings yet
- Dm4 Si Etude TransporteurDocument4 pagesDm4 Si Etude TransporteurM'hamed Rian100% (1)
- Exercices Schéma CinématiqueDocument13 pagesExercices Schéma CinématiqueHajar Ben GaraâNo ratings yet
- CorrigeDocument4 pagesCorrigeHoussamHannad100% (1)
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniNo ratings yet
- Exercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFDocument2 pagesExercices - Cinmatique - Trajectoires - Camion Benne - Chariot Portuaire - Enonc PDFspectrum660% (1)
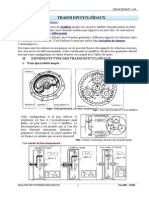
- Train ÉpicycloïdauxDocument9 pagesTrain ÉpicycloïdauxKamel Bousnina100% (1)
- Serie Des TD N°4 Engrenages EMDocument6 pagesSerie Des TD N°4 Engrenages EMGrine Salah EddineNo ratings yet
- Engrennage Ptsi Cours RappelsDocument33 pagesEngrennage Ptsi Cours RappelsCéline LuttiNo ratings yet
- 3-Schématisaton Et Analyse Cinématique PDFDocument15 pages3-Schématisaton Et Analyse Cinématique PDFhamzaNo ratings yet
- TD 18 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 18 - Lois Entrée-Sortie en Position Et en Vitessebhs channelNo ratings yet
- Sujet 1Document10 pagesSujet 1وسيم زعفوريNo ratings yet
- Examens National 2bac Sci Genieur SMB 2016 R PDFDocument26 pagesExamens National 2bac Sci Genieur SMB 2016 R PDFHanane TounsiNo ratings yet
- TD 14 - Cinématique Du Contact PonctuelDocument5 pagesTD 14 - Cinématique Du Contact PonctuelboujbalNo ratings yet
- Exercice 4 Banc Pneumatique A1Document2 pagesExercice 4 Banc Pneumatique A1Mohamed Amine FaidiNo ratings yet
- TD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesDocument4 pagesTD 10 - Cinmatique Analytique - Composition Des Vecteurs Vitesses Et Champ Des Vecteurs VitessesZarroui Abdellah0% (1)
- TD 13 - Comportement Cinématique Des SystèmesDocument9 pagesTD 13 - Comportement Cinématique Des Systèmesbhs channelNo ratings yet
- TD Cinématique CHARIOT FILOGUIDEDocument4 pagesTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- Apsim CNC Sii MP Psi 2020Document13 pagesApsim CNC Sii MP Psi 2020Lamiaa CherkaNo ratings yet
- IntegrationDocument8 pagesIntegrationAuguste VanieNo ratings yet
- 2005 09 National Correction Exo1 EauPiscine 4ptsDocument2 pages2005 09 National Correction Exo1 EauPiscine 4ptsFaiçalEssaberyNo ratings yet
- Poly Biocell QCM Rangueil 10-11Document196 pagesPoly Biocell QCM Rangueil 10-11bonneaug8100% (1)
- ViotDocument179 pagesViottoto_awayNo ratings yet
- 3ds MaxDocument13 pages3ds Maxأنور الغاليNo ratings yet
- Touret A Meuler Corrige PDFDocument2 pagesTouret A Meuler Corrige PDFMohamed Soibaha ChaambaneNo ratings yet
- Charge Permantes: Projet: Lotissement Al Massar, Route de Safi KM 5, Lot #264, MarrakechDocument6 pagesCharge Permantes: Projet: Lotissement Al Massar, Route de Safi KM 5, Lot #264, MarrakechMariaNo ratings yet
- Haut-Rhin - Risques SismiquesDocument8 pagesHaut-Rhin - Risques SismiquesDubois JulienNo ratings yet
- Chapitre 1: Statique Des FluidesDocument26 pagesChapitre 1: Statique Des FluidesBrahim MouhcineNo ratings yet
- Exercice Bac ÉclipseDocument2 pagesExercice Bac ÉclipseamaelcheneyNo ratings yet
- Arbre de DecisionDocument6 pagesArbre de DecisionLoic BeiyraNo ratings yet
- Demarche D'un ProjetDocument7 pagesDemarche D'un ProjetBoughrara anisNo ratings yet
- Mémoire Version Corrigée MaryamDocument176 pagesMémoire Version Corrigée MaryamJohnson noutcheNo ratings yet
- De La Gravitation Quantique - Carlo RovelliDocument9 pagesDe La Gravitation Quantique - Carlo RovelliMichael64No ratings yet
- Cour #03son Et Onde SonoreDocument33 pagesCour #03son Et Onde SonoreAMIN FERNANENo ratings yet
- Série Équilibre Limite TraitéDocument10 pagesSérie Équilibre Limite Traitéadam denni100% (1)
- Mesures Et IncertitudesDocument4 pagesMesures Et IncertitudesmedwiseNo ratings yet
- Document de Maths Terminale ScientifiqueDocument109 pagesDocument de Maths Terminale Scientifiquejean100% (2)
- 6SL3210-1PE22-7UL0 Datasheet FR enDocument3 pages6SL3210-1PE22-7UL0 Datasheet FR enVladimir Mar Roüchköff DioufNo ratings yet
- DS04Document2 pagesDS04Lehacoeur De parisNo ratings yet
- CCTP 07 Electricite 2 PDFDocument39 pagesCCTP 07 Electricite 2 PDFABELWALIDNo ratings yet
- M Ea Gro JMF 01Document5 pagesM Ea Gro JMF 01djidosseNo ratings yet
- 2007 Antilles Exo1 Correction BenzoateMethyle 5.5ptsDocument3 pages2007 Antilles Exo1 Correction BenzoateMethyle 5.5ptsHafid Tlemcen Rossignol PoèteNo ratings yet
- "Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchDocument3 pages"Examen" de Mécanique Des Solides Indéformables: Responsable Du Module: PR H. Ait RimouchAlexis James0% (1)
- Ameriquen2 2022 Exercice1Document4 pagesAmeriquen2 2022 Exercice1Hassaneahamed BoungoueniNo ratings yet
- Chap1-Mouvement de Centre D'inertie (6h)Document5 pagesChap1-Mouvement de Centre D'inertie (6h)KabaNo ratings yet
- FD P 18-662 (Oct.2005) - Guide D - Utilisation Des Normes NF EN 13383 (1 Et 2) Sur Les EnrochementsDocument16 pagesFD P 18-662 (Oct.2005) - Guide D - Utilisation Des Normes NF EN 13383 (1 Et 2) Sur Les EnrochementsDamouh MohamedNo ratings yet
- Ece 22 SVT 01Document2 pagesEce 22 SVT 01ThildemaNo ratings yet
- Cours Forge Sec1Document38 pagesCours Forge Sec1Kawtar BihiNo ratings yet