You might also like
- Handbook of Electrical Engineering: For Practitioners in the Oil, Gas and Petrochemical IndustryFrom EverandHandbook of Electrical Engineering: For Practitioners in the Oil, Gas and Petrochemical IndustryNo ratings yet
- Motor Protection PrinciplesDocument53 pagesMotor Protection PrinciplesGITAM UNIVERISTYNo ratings yet
- Motor Protection PrinciplesDocument35 pagesMotor Protection PrinciplesTrầnThanhTrungNo ratings yet
- Motor Protection Principles ExplainedDocument35 pagesMotor Protection Principles Explainedahmadshoeb19No ratings yet
- Motor Protection SeminarDocument73 pagesMotor Protection SeminarKashinath PscNo ratings yet
- Fundamentals of A Motor Thermal Model and Its Applications in Motor ProtectionDocument15 pagesFundamentals of A Motor Thermal Model and Its Applications in Motor Protectionnokdiego100% (1)
- Motor Thermal ModelDocument15 pagesMotor Thermal ModelnagarajasarmaNo ratings yet
- Bajaj PresentationDocument37 pagesBajaj PresentationAmanuel BerhaneNo ratings yet
- Root Cause Analysis For Wind GeneratorsDocument29 pagesRoot Cause Analysis For Wind GeneratorsFabio PelleritoNo ratings yet
- SIEMENS App-Man-Section10-Rev1 PDFDocument37 pagesSIEMENS App-Man-Section10-Rev1 PDFAlexis Pernía SilvaNo ratings yet
- Harmonics & Power QualityDocument2 pagesHarmonics & Power Qualityhicham boutoucheNo ratings yet
- TribologiaDocument40 pagesTribologiaKevin Diaz NoriegaNo ratings yet
- Cii Ped 2020 r11Document39 pagesCii Ped 2020 r11S BNo ratings yet
- Introduction To TXpert Ecosystem-EnDocument47 pagesIntroduction To TXpert Ecosystem-EnBrunophb2012No ratings yet
- 2KJ3003-1JR23-4AA1-Z D05+G34+G47+K01+K06+L02+L75+M63 Datasheet enDocument1 page2KJ3003-1JR23-4AA1-Z D05+G34+G47+K01+K06+L02+L75+M63 Datasheet enpete20r2No ratings yet
- M EPOCKETENf PDFDocument41 pagesM EPOCKETENf PDFGuilherme GuimarãesNo ratings yet
- SI Outage Report - December 2017Document10 pagesSI Outage Report - December 2017Lindon ManehetaNo ratings yet
- Visual Inspection of Large Electric GeneratorsDocument28 pagesVisual Inspection of Large Electric Generatorsemailsepamku gorgomNo ratings yet
- 8-1. Hydraulic Breaker and Quick ClampDocument11 pages8-1. Hydraulic Breaker and Quick ClampGetachew GechNo ratings yet
- Failure Rate Analysis of Power Circuit Breaker in High Voltage SubstationDocument6 pagesFailure Rate Analysis of Power Circuit Breaker in High Voltage SubstationSing Yew LamNo ratings yet
- Verification and Technical Assessment Protocol YanmarDocument2 pagesVerification and Technical Assessment Protocol YanmarMaryan LacatusNo ratings yet
- Aaaaaa Electrical Generators and Excitation Systems TOKOLOGO MOTORS MPUMALANGADocument7 pagesAaaaaa Electrical Generators and Excitation Systems TOKOLOGO MOTORS MPUMALANGAcraig pretoriusNo ratings yet
- GT Blade Vibrations Basics - Excellent ReadDocument11 pagesGT Blade Vibrations Basics - Excellent ReadMehulkumar Patel100% (1)
- 07.elec Weekly Report 12.06.2023 To 18.06.2023Document4 pages07.elec Weekly Report 12.06.2023 To 18.06.2023Manohar Paul Praveen MNo ratings yet
- manualDocument32 pagesmanualJózsef VinnaiNo ratings yet
- Generator Diagnostics Based On 100 Failure Modes Csaba IRMC 2019Document22 pagesGenerator Diagnostics Based On 100 Failure Modes Csaba IRMC 2019Ari BinukoNo ratings yet
- 29 kW PV System Report for Bogota, ColombiaDocument3 pages29 kW PV System Report for Bogota, ColombiaNelson SalazarNo ratings yet
- Imc-Br004 - En-E V IMPDocument12 pagesImc-Br004 - En-E V IMPSubramanyam Arehalli MuniswariahNo ratings yet
- Failure Criticality Analysis Using Fishikawa Diagram (A Case Study of Dumpers at Ocp, Ramagundam)Document7 pagesFailure Criticality Analysis Using Fishikawa Diagram (A Case Study of Dumpers at Ocp, Ramagundam)Ashis DasNo ratings yet
- Welding Equipment Operations Reference GuideDocument92 pagesWelding Equipment Operations Reference GuideTonluck KaimakNo ratings yet
- LIST OF PLANT MACHINERY EQUIPMENTDocument11 pagesLIST OF PLANT MACHINERY EQUIPMENTAbhishek Kumar RaiNo ratings yet
- Rotating Machines Testing and Monitoring Brochure ENU PDFDocument28 pagesRotating Machines Testing and Monitoring Brochure ENU PDFmunggangNo ratings yet
- Asset Management Solutions - ThomasDocument44 pagesAsset Management Solutions - Thomassajeevi piumikaNo ratings yet
- SECTION 1.20: SpecificationsDocument26 pagesSECTION 1.20: SpecificationsLUISA FERNANDA TORRES MANOSALVANo ratings yet
- Industrial Oils Condition MonitoringDocument29 pagesIndustrial Oils Condition Monitoringf2h52svrbmNo ratings yet
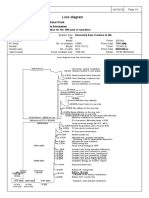
- Loss DiagramDocument1 pageLoss DiagramAahd GhafriNo ratings yet
- EDM and USM of Hard Materials: K. P. Rajurkar University of Nebraska-Lincoln, USADocument85 pagesEDM and USM of Hard Materials: K. P. Rajurkar University of Nebraska-Lincoln, USAhasib_07No ratings yet
- RCA - 05-P521A Shaft FailureDocument40 pagesRCA - 05-P521A Shaft FailureAnkit SharmaNo ratings yet
- Failure Mechanisms in Petrochemical IndustryDocument11 pagesFailure Mechanisms in Petrochemical IndustryGonzalo GómezNo ratings yet
- J Stead PaperDocument6 pagesJ Stead PaperixoteeNo ratings yet
- Customer Seminar Off-Line Testing Using Doble - Manila - March 2018Document95 pagesCustomer Seminar Off-Line Testing Using Doble - Manila - March 2018Jay KuizonNo ratings yet
- Upgrade Your Motors From Non-IE To IE3Document28 pagesUpgrade Your Motors From Non-IE To IE3Mohamed AskarNo ratings yet
- Machine Tool Failure Data Analysis For Condition Monitoring ApplicationDocument9 pagesMachine Tool Failure Data Analysis For Condition Monitoring ApplicationKirubel MulugetaNo ratings yet
- 2KJ3110-1HL23-4FM1-Z_D01+G25+H08+K01+K06+L02+L75+M56_datasheet_enDocument1 page2KJ3110-1HL23-4FM1-Z_D01+G25+H08+K01+K06+L02+L75+M56_datasheet_enpanca_26No ratings yet
- Fault Zone Analysis RotorDocument8 pagesFault Zone Analysis Rotorabhe prasetyaNo ratings yet
- PV Syst 66 5MWp DC 49 94MW AC Trina 540Wp Module Solis 220kW String InveDocument6 pagesPV Syst 66 5MWp DC 49 94MW AC Trina 540Wp Module Solis 220kW String InveMeHuL PNo ratings yet
- Energy Conservation Measures in Industrial Drives Through Selection, Operation and MaintenanceDocument10 pagesEnergy Conservation Measures in Industrial Drives Through Selection, Operation and Maintenancemorshad61No ratings yet
- Hydraulic Unbalance in Oil Injected Twin Rotary Screw Compressor Vibration Analysis (A Case History Related To Iran Oil Industries)Document7 pagesHydraulic Unbalance in Oil Injected Twin Rotary Screw Compressor Vibration Analysis (A Case History Related To Iran Oil Industries)Conifer YuNo ratings yet
- Troubleshooting Guide for Hydraulic, Mechanical & Electrical SystemsDocument99 pagesTroubleshooting Guide for Hydraulic, Mechanical & Electrical SystemsJoseph Emmanuel ParedesNo ratings yet
- Factsheet Common Causes of Gearbox Failure5Document1 pageFactsheet Common Causes of Gearbox Failure5Joaquin Andres Boilet HuertaNo ratings yet
- ULSAC Model 7-HydroformingDocument11 pagesULSAC Model 7-HydroformingAnonymous VRspXsmNo ratings yet
- Automatic Transmission Technology SelectDocument26 pagesAutomatic Transmission Technology SelectSHAH PRATIK SUNILKUMARNo ratings yet
- 2KJ3110-1JU23-9AL1-Z D01+G47+K01+K06+L02+L75+M59+N1S Datasheet enDocument1 page2KJ3110-1JU23-9AL1-Z D01+G47+K01+K06+L02+L75+M59+N1S Datasheet enLance AyoubNo ratings yet
- PVsyst Meralco Power House Merlin 105Wp + AbbDocument5 pagesPVsyst Meralco Power House Merlin 105Wp + AbbMARK ARQUE LACANARIANo ratings yet
- Instruction Manual: Installation Operation Maintenance Standard AC GeneratorDocument50 pagesInstruction Manual: Installation Operation Maintenance Standard AC GeneratorВладимирNo ratings yet
- REAP OUTLINE (Generator and Motor Failure)Document30 pagesREAP OUTLINE (Generator and Motor Failure)Tutorial TeknikNo ratings yet
- Electric Motor Maintenance and Troubleshooting, 2nd EditionFrom EverandElectric Motor Maintenance and Troubleshooting, 2nd EditionRating: 3 out of 5 stars3/5 (2)
- Failure Analysis in Engineering ApplicationsFrom EverandFailure Analysis in Engineering ApplicationsRating: 1 out of 5 stars1/5 (1)
- Offshore Electrical EngineeringFrom EverandOffshore Electrical EngineeringRating: 3.5 out of 5 stars3.5/5 (5)
- AlternatorDocument16 pagesAlternatorjeevapillay100% (1)
- Code MATH Course Details PDFDocument80 pagesCode MATH Course Details PDFAnees RahmanNo ratings yet
- DynamicsDocument2 pagesDynamicsCoolman PoonNo ratings yet
- Betz, Joseph (1977) - Violence - Garver's Definition and A Deweyan Correction, in Ethics, Vol. 87, No 4, July, 1977, Pp. 339-351Document14 pagesBetz, Joseph (1977) - Violence - Garver's Definition and A Deweyan Correction, in Ethics, Vol. 87, No 4, July, 1977, Pp. 339-351Daniel__DamascenoNo ratings yet
- 9-Chapter 33 - Charging System BasicsDocument51 pages9-Chapter 33 - Charging System BasicsOKIDI Thomas BecketNo ratings yet
- Basic10 14 PDFDocument15 pagesBasic10 14 PDFSamuel Muabia PlanetNo ratings yet
- Int. J. Multiphase Flow Vol. 12, No. 5, Pp. 745-758, 1986Document14 pagesInt. J. Multiphase Flow Vol. 12, No. 5, Pp. 745-758, 1986rockyNo ratings yet
- Arithmetic Logic Unit: ObjectiveDocument4 pagesArithmetic Logic Unit: ObjectiveNour YoussefNo ratings yet
- 0648-LMSPowerTransfHandbk 0 PDFDocument62 pages0648-LMSPowerTransfHandbk 0 PDFReaksmey Bin100% (1)
- Lab Exercise No. 2 Diode Curves: RocedureDocument4 pagesLab Exercise No. 2 Diode Curves: RocedureJep JepNo ratings yet
- Stray InductanceDocument8 pagesStray InductanceAmirNo ratings yet
- Physics Cambridge Igcse Year 10 Paper 1Document18 pagesPhysics Cambridge Igcse Year 10 Paper 1Adibah AliasNo ratings yet
- EM Manipulation: Control ElectromagnetismDocument3 pagesEM Manipulation: Control ElectromagnetismSunčica NisamNo ratings yet
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- Power Saver for IndustriesDocument13 pagesPower Saver for IndustriesderejeNo ratings yet
- White Paper: Lightning and Surge Protection For Wind TurbinesDocument0 pagesWhite Paper: Lightning and Surge Protection For Wind TurbineslmagasNo ratings yet
- PSGDocument6 pagesPSGsenthilkumarNo ratings yet
- LOFCADocument35 pagesLOFCAAsghar BalochNo ratings yet
- Lecture 2 StaticsDocument41 pagesLecture 2 StaticsMaro IdehNo ratings yet
- Block Stacking ProblemDocument10 pagesBlock Stacking ProblemZoob100% (1)
- Chapter 4 Bearings PDFDocument50 pagesChapter 4 Bearings PDFAnonymous 7aN0oYUm7vNo ratings yet
- ABB Instrument TransformersDocument64 pagesABB Instrument Transformersrajakprashant100% (3)
- 15HP 4P XP Us MotorsDocument10 pages15HP 4P XP Us MotorsAndres SanchezNo ratings yet
- Formula Sheet chp18-22Document20 pagesFormula Sheet chp18-22remodsouza832No ratings yet
- KBCC-240D: Chassis Mount Penta-DriveDocument2 pagesKBCC-240D: Chassis Mount Penta-DriveArkhamNo ratings yet
- Class 12 Physics Energy of Charged ParticlesDocument5 pagesClass 12 Physics Energy of Charged ParticlesCrazy about JunglesNo ratings yet
- Electric Charges and FieldsDocument7 pagesElectric Charges and FieldsRajender ReddyNo ratings yet
- Cubic block force calculations inclined planeDocument14 pagesCubic block force calculations inclined planevenkateswaranNo ratings yet
- Series HSV-180D AC Servo Drive User's ManualDocument114 pagesSeries HSV-180D AC Servo Drive User's ManualKen JunNo ratings yet