You might also like
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Control Eng.Document4 pagesControl Eng.KokWai LeeNo ratings yet
- Assignment 1Document6 pagesAssignment 1yamen.nasser7No ratings yet
- ME311 Autumn2021 T5Document5 pagesME311 Autumn2021 T5Varun PathakNo ratings yet
- Tutorial 1Document2 pagesTutorial 1Bookal RohanNo ratings yet
- Assignment#3Document2 pagesAssignment#3Amit SinghNo ratings yet
- Worksheet VDocument3 pagesWorksheet VSha Tu BolaNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument36 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziIman Mokari BolhassanNo ratings yet
- tablaDocument2 pagestablaCarlos Andres Ortiz BravoNo ratings yet
- Transfer Function AnalysisDocument8 pagesTransfer Function AnalysissidhantNo ratings yet
- Process Control QuestionsDocument3 pagesProcess Control QuestionsAsaybe BofahNo ratings yet
- Vector Valued Functions MathDocument12 pagesVector Valued Functions MathRyan Jhay YangNo ratings yet
- List No. 10 Mathematical Analysis II: Industrial EngineeringDocument5 pagesList No. 10 Mathematical Analysis II: Industrial EngineeringJheiner Bacilio IbañezNo ratings yet
- Faculty Test Laplace Transform TablesDocument3 pagesFaculty Test Laplace Transform TablesumarNo ratings yet
- Representation of Bandpass SignalsDocument10 pagesRepresentation of Bandpass SignalsManoj GowdaNo ratings yet
- Solution Assignment 3Document7 pagesSolution Assignment 3sushant sharmaNo ratings yet
- GM Signal&systemDocument93 pagesGM Signal&systemBhaskar SharmaNo ratings yet
- Integration ComplexDocument19 pagesIntegration ComplexANDRES GUARDIA CAYONo ratings yet
- Assignment#2Document2 pagesAssignment#2vaishnaviNo ratings yet
- EE320A Tutorial 1 Fourier Series Properties and System AnalysisDocument2 pagesEE320A Tutorial 1 Fourier Series Properties and System Analysismohit kumarNo ratings yet
- U & D Cheat CodeDocument4 pagesU & D Cheat Codeazamchishty796No ratings yet
- CA2019 Topic 04 PDFDocument72 pagesCA2019 Topic 04 PDFDeepanshu RewariaNo ratings yet
- Dada La Señal No Periódica G (T)Document27 pagesDada La Señal No Periódica G (T)Marko Chambi ColqueNo ratings yet
- ENGG2310A (Fall 2018) : Problem 1-1Document11 pagesENGG2310A (Fall 2018) : Problem 1-1Tsz Wing YipNo ratings yet
- CL302Document14 pagesCL302Fake Account 1No ratings yet
- Mathematical and Statistical .' Tables: Property of University of Western AustraliaDocument5 pagesMathematical and Statistical .' Tables: Property of University of Western AustraliaFredNo ratings yet
- ECE102 hw2Document5 pagesECE102 hw2Yi LinNo ratings yet
- Graphical Convolution Example: T T T G T FDocument22 pagesGraphical Convolution Example: T T T G T FÇháråñ ÇhèrryNo ratings yet
- Graphical ConvolutionDocument22 pagesGraphical ConvolutionoiuzdsaNo ratings yet
- Graphical Convolution Example: T T T G T FDocument22 pagesGraphical Convolution Example: T T T G T FsureshNo ratings yet
- Graphical Convolution Example: T T T G T FDocument22 pagesGraphical Convolution Example: T T T G T Fee19m011 ee19m011No ratings yet
- Continuous Time ConvolutionDocument28 pagesContinuous Time ConvolutionlhslhinNo ratings yet
- Taller Cuatro Análisis de SistemasDocument5 pagesTaller Cuatro Análisis de SistemasCarlosNo ratings yet
- HW3 SolutionDocument4 pagesHW3 SolutionThienPhuc TranNo ratings yet
- Fourier Transform of Modulated Rectangular PulseDocument28 pagesFourier Transform of Modulated Rectangular PulseRicky FijayantoNo ratings yet
- EE361 Formula SheetDocument2 pagesEE361 Formula SheetObed AhmadNo ratings yet
- Dsa Q8Document7 pagesDsa Q8sanskritiNo ratings yet
- CALCULATING VECTORSDocument2 pagesCALCULATING VECTORSVeronica BonnyNo ratings yet
- (Theox - 1 155 207Document53 pages(Theox - 1 155 207Ricky FijayantoNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- EE207 Problem set 3 IIT ROPARDocument12 pagesEE207 Problem set 3 IIT ROPARsumithasreekumar5No ratings yet
- Y (A A) P: N N+K I IDocument15 pagesY (A A) P: N N+K I INgọc ToảnNo ratings yet
- Y (A A) P: N N+K I IDocument15 pagesY (A A) P: N N+K I INgọc ToảnNo ratings yet
- T2_Sistem Kendali_F1B021003_Azwajum MutohharohDocument48 pagesT2_Sistem Kendali_F1B021003_Azwajum MutohharohBeni Nungroho sudiantoroNo ratings yet
- Process Control Block DiagramsDocument29 pagesProcess Control Block DiagramsLiyana HalimNo ratings yet
- Homework Chapter 03-2Document3 pagesHomework Chapter 03-2Miguel RobalinoNo ratings yet
- Digital PID For DC Motor ControlDocument7 pagesDigital PID For DC Motor ControlMohsensorNo ratings yet
- Mat135f21 Practice ExamDocument8 pagesMat135f21 Practice Examcarlycarly422No ratings yet
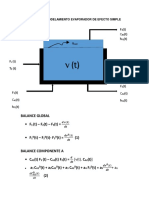
- Modeling a simple evaporator balancesDocument12 pagesModeling a simple evaporator balancesNathalia Falk UribeNo ratings yet
- Me375 Exam2key s17Document2 pagesMe375 Exam2key s17BenNo ratings yet
- WEEK1 RevisionDocument21 pagesWEEK1 RevisionMOHD ENDRA SHAFIQNo ratings yet
- Tanabe SuganoDocument6 pagesTanabe Suganojessie100% (1)
- Continuous Time Convolution AnimationDocument28 pagesContinuous Time Convolution AnimationmohanNo ratings yet
- Reconstruction PDFDocument13 pagesReconstruction PDFRamaDinakaranNo ratings yet
- Fourier Series Explained for Square Integrable FunctionsDocument56 pagesFourier Series Explained for Square Integrable FunctionsSteve MayerNo ratings yet
- Digital CommunicationDocument105 pagesDigital CommunicationSabarinathNo ratings yet
- IIT Kanpur tutorial examines Fourier series propertiesDocument8 pagesIIT Kanpur tutorial examines Fourier series propertiesRuchika WaskleNo ratings yet
- University of Hertfordshire Control Systems Formula SheetDocument12 pagesUniversity of Hertfordshire Control Systems Formula SheetEidren 02No ratings yet
- Signals & Systems Questions Set 01Document13 pagesSignals & Systems Questions Set 01Sachin Singh NegiNo ratings yet
- Science8 q1 Mod3 Potential-And-kinetic-Energy v2Document23 pagesScience8 q1 Mod3 Potential-And-kinetic-Energy v2Keith Genesis Ruiz AglubaNo ratings yet
- Using Wind Tunnel Tests To Study Pressure Distributions Around A Bluff Body: The Case of A Circular CylinderDocument6 pagesUsing Wind Tunnel Tests To Study Pressure Distributions Around A Bluff Body: The Case of A Circular CylinderjhNo ratings yet
- Jasmine Tran - Unit 2 Free Response Question - Ap Calc PortfolioDocument2 pagesJasmine Tran - Unit 2 Free Response Question - Ap Calc Portfolioapi-574938628No ratings yet
- Liquefaction of Soils During EarthquakesDocument12 pagesLiquefaction of Soils During EarthquakesWilham Louhenapessy JrNo ratings yet
- Optimization Efficiency Dampers: of The of Aeolian VibrationDocument3 pagesOptimization Efficiency Dampers: of The of Aeolian VibrationServando LozanoNo ratings yet
- Revised Profile Capacity-UpdateDocument2 pagesRevised Profile Capacity-UpdateRitwick BhattacharyaNo ratings yet
- Lintels Problems - STEEL STRUCTURESDocument8 pagesLintels Problems - STEEL STRUCTURESDarya Memon100% (1)
- Pressure and Temperature Drawdown Well Testing: Similarities and DifferencesDocument10 pagesPressure and Temperature Drawdown Well Testing: Similarities and DifferencesNik Alpa RinandoNo ratings yet
- Wave Particle DualityDocument32 pagesWave Particle DualityDavid ThaiNo ratings yet
- Designing Integral Bridges Without Movement JointsDocument32 pagesDesigning Integral Bridges Without Movement Jointspmullins_11100% (5)
- Session 0 KOM PDFDocument9 pagesSession 0 KOM PDFVenkatesh GangadharNo ratings yet
- List of Thermodynamic PropertiesDocument3 pagesList of Thermodynamic PropertiesmuhammadNo ratings yet
- Fundamentals of AcousticsDocument180 pagesFundamentals of Acousticscastro100% (7)
- Seicmic Design of Tunnel by WangDocument159 pagesSeicmic Design of Tunnel by WangSugam JainNo ratings yet
- Kumar and Kodur 2019 PCI: Kumarpu2@msu - EduDocument20 pagesKumar and Kodur 2019 PCI: Kumarpu2@msu - Eduhussen miftaNo ratings yet
- Problem Set Strength of MaterialsDocument2 pagesProblem Set Strength of MaterialsRoku Dee13% (8)
- 정역학13판6~8장Document416 pages정역학13판6~8장김비돌No ratings yet
- Tut 6Document3 pagesTut 6Jesús Alejandro SantillánNo ratings yet
- Elder 1967Document15 pagesElder 1967ALEJANDRO GANCEDO TORALNo ratings yet
- 2021 Module-3Document9 pages2021 Module-3Jhon Ronald AlbaNo ratings yet
- ANSYS Mechanical APDL Fluids Analysis Guide PDFDocument46 pagesANSYS Mechanical APDL Fluids Analysis Guide PDFda_pinon100% (1)
- Magnetoplasmadynamic ThrustersDocument22 pagesMagnetoplasmadynamic ThrustersAdam BruceNo ratings yet
- Modern Physics PDFDocument20 pagesModern Physics PDFPrathm MittalNo ratings yet
- Slug Tracking Simulation of Severe Slugging Experiments: Tor Kindsbekken Kjeldby, Ruud Henkes and Ole Jørgen NydalDocument6 pagesSlug Tracking Simulation of Severe Slugging Experiments: Tor Kindsbekken Kjeldby, Ruud Henkes and Ole Jørgen NydalAyauwu LovedayNo ratings yet
- User Subroutines Reference Manual in AbaqusDocument569 pagesUser Subroutines Reference Manual in AbaqusNguyễn Hữu HàoNo ratings yet
- Engr 2900 Mech of Materials Exam 2 KeysDocument8 pagesEngr 2900 Mech of Materials Exam 2 KeysAshleyHeldNo ratings yet
- PLAXIS-3D Dam StabilityDocument20 pagesPLAXIS-3D Dam Stabilityjimmysatanco100% (1)
- ME311 Machine Design: Lecture 6: Fluctuating Fatigue and The Goodman Diagram ImpactDocument24 pagesME311 Machine Design: Lecture 6: Fluctuating Fatigue and The Goodman Diagram Impactamalendu_biswas_1No ratings yet
- Simple Joints JaspartDocument50 pagesSimple Joints JaspartSargunam Sankaravadivel100% (1)
- Funds of Inertial Navigation Satellite Based Positioning and Their Integration PDFDocument44 pagesFunds of Inertial Navigation Satellite Based Positioning and Their Integration PDFCaehhsegffNo ratings yet