You might also like
- 06 Modificar Frecuencia de Parpadeo de Varios LedDocument2 pages06 Modificar Frecuencia de Parpadeo de Varios LedJuan Pablo EspinalNo ratings yet
- Ternavasio Historia ArgentinaDocument28 pagesTernavasio Historia ArgentinapierdonneNo ratings yet
- Programa Robotica1Document2 pagesPrograma Robotica1pierdonneNo ratings yet
- Sistemas de AlimentacionDocument156 pagesSistemas de AlimentacionpierdonneNo ratings yet
- Calcula La Sensación Térmica de Tu Viaje - FórmulamotoDocument5 pagesCalcula La Sensación Térmica de Tu Viaje - FórmulamotopierdonneNo ratings yet
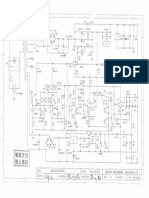
- 1627A SchemDocument1 page1627A SchempierdonneNo ratings yet
- ¿Qué Hacen Las Aplicaciones Con Toda Nuestra Información - Kids and Teens OnlineDocument3 pages¿Qué Hacen Las Aplicaciones Con Toda Nuestra Información - Kids and Teens OnlinepierdonneNo ratings yet
- CapDocument18 pagesCapDanny Joel C SNo ratings yet
- Función Map de Arduino en Scratch 2Document2 pagesFunción Map de Arduino en Scratch 2pierdonneNo ratings yet
- Cómo Saber Si Su Hijo - A Está Desarrollando Adicción Al Móvil y Qué Hacer - Kids and Teens OnlineDocument3 pagesCómo Saber Si Su Hijo - A Está Desarrollando Adicción Al Móvil y Qué Hacer - Kids and Teens OnlinepierdonneNo ratings yet
- Dolores 2.0 - El Cuerpo y Las Nuevas TecnologíasDocument4 pagesDolores 2.0 - El Cuerpo y Las Nuevas TecnologíaspierdonneNo ratings yet
- Cómo Prevenir Dolencias Uso Dispositivos ElectrónicosDocument7 pagesCómo Prevenir Dolencias Uso Dispositivos ElectrónicospierdonneNo ratings yet
- Practica TC 2Document8 pagesPractica TC 2enayachNo ratings yet
- "Mamá - No Puedo Parar Los Pensamientos Que Me Llegan A La Cabeza" - Kids and Teens OnlineDocument6 pages"Mamá - No Puedo Parar Los Pensamientos Que Me Llegan A La Cabeza" - Kids and Teens OnlinepierdonneNo ratings yet
- Experiencias de Los Adolescentes en Internet - Rosario3Document4 pagesExperiencias de Los Adolescentes en Internet - Rosario3pierdonneNo ratings yet
- Reducir Tiempo Niños Con Pantallas - Primer Paso de PadresDocument5 pagesReducir Tiempo Niños Con Pantallas - Primer Paso de PadrespierdonneNo ratings yet
- Ya Hay Chicos Que Pasan 13 Horas Por Día en La WebDocument6 pagesYa Hay Chicos Que Pasan 13 Horas Por Día en La WebpierdonneNo ratings yet
- Los Efectos Negativos de Las Pantallas en Niños y Adolescentes - LanacionDocument6 pagesLos Efectos Negativos de Las Pantallas en Niños y Adolescentes - LanacionpierdonneNo ratings yet
- Multas A Los Padres, La ... Cnología - LanacionDocument3 pagesMultas A Los Padres, La ... Cnología - LanacionpierdonneNo ratings yet
- Niños y Adolescentes, en Alerta Constante Por Los Dispositivos Móviles - La Voz Del InteriorDocument4 pagesNiños y Adolescentes, en Alerta Constante Por Los Dispositivos Móviles - La Voz Del InteriorpierdonneNo ratings yet
- El Miedo A Quedarse Sin Celular - Un Trastorno Que Llegó para Quedarse - BBC MundoDocument10 pagesEl Miedo A Quedarse Sin Celular - Un Trastorno Que Llegó para Quedarse - BBC MundopierdonneNo ratings yet
- Día Del Niño - Cómo Enseñarles A Los Chicos A Cuidarse en InternetDocument3 pagesDía Del Niño - Cómo Enseñarles A Los Chicos A Cuidarse en InternetpierdonneNo ratings yet
- Cómo Prevenir Dolencias Uso Dispositivos ElectrónicosDocument7 pagesCómo Prevenir Dolencias Uso Dispositivos ElectrónicospierdonneNo ratings yet
- Pegados A La PantallaDocument4 pagesPegados A La PantallapierdonneNo ratings yet
- La Adicción A La Tecnología Causa Fuertes Enojos en Los Más ChicosDocument4 pagesLa Adicción A La Tecnología Causa Fuertes Enojos en Los Más ChicospierdonneNo ratings yet
- Argentina 70% de Los Chicos Postergan Estudiar Io Los AndesDocument2 pagesArgentina 70% de Los Chicos Postergan Estudiar Io Los AndespierdonneNo ratings yet
- Casi La Mitad de Los Adolescentes No Se Desconectan Ni para DormirDocument4 pagesCasi La Mitad de Los Adolescentes No Se Desconectan Ni para DormirpierdonneNo ratings yet
- Cómo Capturar en Video La Pantalla Con Free Sreen To VideoDocument1 pageCómo Capturar en Video La Pantalla Con Free Sreen To VideopierdonneNo ratings yet
- Los Teléfonos Inteligentes Hacen EnfermarDocument8 pagesLos Teléfonos Inteligentes Hacen EnfermarpierdonneNo ratings yet
- Arduino Energy Meter - AllDocument21 pagesArduino Energy Meter - AllpierdonneNo ratings yet