You might also like
- SEISMOLOGY, Lecture 2Document38 pagesSEISMOLOGY, Lecture 2Singgih Satrio WibowoNo ratings yet
- Classical Mechanics Taylor SolutionsDocument67 pagesClassical Mechanics Taylor SolutionsSAMER IQBALNo ratings yet
- UNIT-4 Multiple Integrals and Their ApplicationsDocument63 pagesUNIT-4 Multiple Integrals and Their ApplicationsTharun konda100% (1)
- Theory and Applications in Computational Chemistry PDFDocument290 pagesTheory and Applications in Computational Chemistry PDFSérgio Henrique MendesNo ratings yet
- Airy StressFunctionDocument7 pagesAiry StressFunctionManoj RamNo ratings yet
- Advanced Fluid Mechanics Notes on Transient Boundary LayerDocument6 pagesAdvanced Fluid Mechanics Notes on Transient Boundary LayerShridhar MathadNo ratings yet
- Linear Viscoelasticity: 5.1 Model EquationsDocument16 pagesLinear Viscoelasticity: 5.1 Model Equationsapi-3733260No ratings yet
- Elasticity Theory BasisDocument9 pagesElasticity Theory BasisGiovanni Morais TeixeiraNo ratings yet
- Midterm exam solutions for introductory solid mechanicsDocument4 pagesMidterm exam solutions for introductory solid mechanicsRitunjay JhaNo ratings yet
- Midterm ExamDocument9 pagesMidterm Examhandikajati kusumaNo ratings yet
- Calculatioyjrtfgjdof Revolution With ArbitraryDocument12 pagesCalculatioyjrtfgjdof Revolution With ArbitrarySmileNo ratings yet
- Lin Stab AnalysisDocument7 pagesLin Stab AnalysisMohammad RameezNo ratings yet
- Lec 26Document5 pagesLec 26110 RCCNo ratings yet
- CE 240 Soil Mechanics & Foundations: Stresses in A Soil Mass I (Das, Ch. 9)Document27 pagesCE 240 Soil Mechanics & Foundations: Stresses in A Soil Mass I (Das, Ch. 9)jorge.jimenezNo ratings yet
- StressDocument3 pagesStressdamastergen326No ratings yet
- 3 - Stress TensorDocument23 pages3 - Stress TensorRishan Joshua DsilvaNo ratings yet
- Linear plate bending and laminate theoryDocument32 pagesLinear plate bending and laminate theorysebastianmatiasNo ratings yet
- 1 Transverse Vibration of A Taut String: X+DX XDocument22 pages1 Transverse Vibration of A Taut String: X+DX XwenceslaoflorezNo ratings yet
- NLA Edit Draft (Jan26)Document28 pagesNLA Edit Draft (Jan26)Justin WebsterNo ratings yet
- Hlektronika ShmeivseisDocument34 pagesHlektronika ShmeivseisPANKOPANKNo ratings yet
- CH 2Document19 pagesCH 2Ibrahim El SharNo ratings yet
- q3 ThermoelasticityDocument3 pagesq3 ThermoelasticityDanielStauffenbergNo ratings yet
- 1 General Solution To Wave Equation: One Dimensional WavesDocument35 pages1 General Solution To Wave Equation: One Dimensional WaveswenceslaoflorezNo ratings yet
- CM LC1Document28 pagesCM LC1Eng W EaNo ratings yet
- 1 MatMomSim-3.0 & 3.1 Strong & Weak Forms 09dec2017 PDFDocument3 pages1 MatMomSim-3.0 & 3.1 Strong & Weak Forms 09dec2017 PDFعلي ماجد لفتهNo ratings yet
- Wave EqnDocument15 pagesWave EqnALNo ratings yet
- 101 PDFDocument21 pages101 PDFThaung Myint OoNo ratings yet
- Mechanics of Aircraft Structures: Warping in Circular BarsDocument46 pagesMechanics of Aircraft Structures: Warping in Circular Barsroundstorm1100% (1)
- Non-Abelian Gauge Theories LectureDocument23 pagesNon-Abelian Gauge Theories Lecturecifarha venantNo ratings yet
- FEM FullDocument423 pagesFEM FullHarish LambadiNo ratings yet
- Intro 3Document5 pagesIntro 3Brian OtienoNo ratings yet
- Lec 28Document5 pagesLec 28110 RCCNo ratings yet
- 13 FractionalViscoelasticModelsDocument20 pages13 FractionalViscoelasticModelsNam Huu TranNo ratings yet
- Note2 PDFDocument15 pagesNote2 PDFAvinash KumarNo ratings yet
- 3 Some Basic Equations of Continuum MechanicsDocument18 pages3 Some Basic Equations of Continuum MechanicsmaheshNo ratings yet
- FE Formulation of Transient Elasticity ProblemsDocument31 pagesFE Formulation of Transient Elasticity ProblemsstrawberrypieNo ratings yet
- Shear Corr 2001 PDFDocument20 pagesShear Corr 2001 PDFCHILAKAPATI ANJANEYULUNo ratings yet
- Theory of Elasticity Supplementary Notes: J. N. ReddyDocument52 pagesTheory of Elasticity Supplementary Notes: J. N. ReddykkhemmoNo ratings yet
- 6 Difference Equations: 6.1 Comparison To ODE and GeneralitiesDocument13 pages6 Difference Equations: 6.1 Comparison To ODE and GeneralitiesYanira EspinozaNo ratings yet
- The Equilibrium EquationsDocument6 pagesThe Equilibrium EquationsJoão DiasNo ratings yet
- Elasticity OverviewDocument8 pagesElasticity OverviewEric ParkerNo ratings yet
- Large Deformation Plasticity and MPM (Working Paper)Document42 pagesLarge Deformation Plasticity and MPM (Working Paper)b.banerjee.nz6800No ratings yet
- IIT Delhi: 1 Need For Stress-Strain Relation (Start Time: 00:25)Document8 pagesIIT Delhi: 1 Need For Stress-Strain Relation (Start Time: 00:25)Dhansingh KokareNo ratings yet
- ME651 Problem Set 1 solutionsDocument2 pagesME651 Problem Set 1 solutionsPawan NegiNo ratings yet
- Prandtl Stress FunctionDocument10 pagesPrandtl Stress FunctionJuan MNo ratings yet
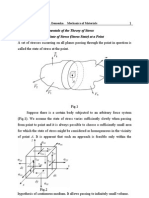
- LECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A PointDocument6 pagesLECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A Pointwinowich5813No ratings yet
- Dynamic Equilibrium of Deformable SolidsDocument25 pagesDynamic Equilibrium of Deformable SolidsAbdolreza AghajanpourNo ratings yet
- VIBRATION OF A TAUT STRINGDocument22 pagesVIBRATION OF A TAUT STRINGMohan NayakaNo ratings yet
- 1.7 Stress TensorDocument13 pages1.7 Stress TensorAstrini Nurul SentanuNo ratings yet
- Met 1Document46 pagesMet 1Ahmed AbdelhamedNo ratings yet
- 1.1 Applications of Shear StrengthDocument7 pages1.1 Applications of Shear StrengthCharan DeepNo ratings yet
- 03 - Continuum Description of A PlasmaDocument18 pages03 - Continuum Description of A PlasmaSamNo ratings yet
- The Method of Characteristics Applied To Quasi-Linear PDEsDocument11 pagesThe Method of Characteristics Applied To Quasi-Linear PDEsAmit RaiNo ratings yet
- Leyes de ConservacionDocument13 pagesLeyes de ConservacionMario ParedesNo ratings yet
- Oso 9780198827351 Chapter 3Document20 pagesOso 9780198827351 Chapter 3SigmundNo ratings yet
- Brownian Dynamics of Polymers Dumbbell and Rouse Models: G. Marrucci Università Di Napoli Federico IIDocument25 pagesBrownian Dynamics of Polymers Dumbbell and Rouse Models: G. Marrucci Università Di Napoli Federico IIDean EspositoNo ratings yet
- Lecture 3Document15 pagesLecture 3ansgcekNo ratings yet
- Vibration of Single Degree of Freedom SystemDocument31 pagesVibration of Single Degree of Freedom SystemEnriqueGDNo ratings yet
- EN380 Naval Materials Science and Engineering Course Notes, U.S. Naval AcademyDocument7 pagesEN380 Naval Materials Science and Engineering Course Notes, U.S. Naval Academysrinivas pavan kumar ANo ratings yet
- CurvesDocument15 pagesCurvescuriosityNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lec9 PDFDocument34 pagesLec9 PDFshravanNo ratings yet
- Pa1 PDFDocument1 pagePa1 PDFshravanNo ratings yet
- Pa1 PDFDocument1 pagePa1 PDFshravanNo ratings yet
- Autobiography as a Literary GenreDocument44 pagesAutobiography as a Literary GenreshravanNo ratings yet
- Combustion in Si EnginesDocument36 pagesCombustion in Si Enginesrgopi_83No ratings yet
- HW 1Document3 pagesHW 1shravanNo ratings yet
- NPTEL Web Course On Complex Analysis: A. SwaminathanDocument16 pagesNPTEL Web Course On Complex Analysis: A. SwaminathanAditya KoutharapuNo ratings yet
- Linear Algebra and its Applications: Functions of a matrix and Krylov matrices聻Document16 pagesLinear Algebra and its Applications: Functions of a matrix and Krylov matrices聻krrrNo ratings yet
- HW03Document1 pageHW03陳信儒No ratings yet
- Singular Perturbation An OverviewDocument46 pagesSingular Perturbation An OverviewBorislav BrnjadaNo ratings yet
- Math6 2017Document85 pagesMath6 2017Cathy AngNo ratings yet
- Easiest definition of entropy in one sentenceDocument19 pagesEasiest definition of entropy in one sentenceMark J. Burton IINo ratings yet
- Path Tracking Discoveries and Landmark DevelopmentsDocument18 pagesPath Tracking Discoveries and Landmark DevelopmentsYamla JattNo ratings yet
- PPSC Quantum MechanicsDocument50 pagesPPSC Quantum MechanicsMuhammad Zubair FarooqiNo ratings yet
- Intro To Lagrangian MechanicsDocument12 pagesIntro To Lagrangian Mechanicscj29195No ratings yet
- Poto ChemDocument625 pagesPoto Chemdgry7975No ratings yet
- Chapter 11: Radiation: 11.1 Dipole Radiation 11.1.1 What Is Radiation? 11.1.2 Electric Dipole RadiationDocument4 pagesChapter 11: Radiation: 11.1 Dipole Radiation 11.1.1 What Is Radiation? 11.1.2 Electric Dipole RadiationMadhumika ThammaliNo ratings yet
- 29-M.Sc. PhysicsDocument111 pages29-M.Sc. PhysicsM. BalakrishnanNo ratings yet
- Laplace Transform ExplainedDocument56 pagesLaplace Transform ExplainedHimanshu MeenaNo ratings yet
- Principal Quantum NumberDocument11 pagesPrincipal Quantum NumberPraveen KumarNo ratings yet
- ATOMIC STRUCTURE: SUBATOMIC PARTICLES, NUCLEUS, PROTONS, NEUTRONS, ELECTRONSDocument34 pagesATOMIC STRUCTURE: SUBATOMIC PARTICLES, NUCLEUS, PROTONS, NEUTRONS, ELECTRONSYieksh BernaldeNo ratings yet
- 195045661Document5 pages195045661five2ninexNo ratings yet
- Chapter Four 4. TransformationsDocument14 pagesChapter Four 4. TransformationsmazengiyaNo ratings yet
- Segamat High 2018T2 TRIAL Section A (45 Marks) Answer All Questions in This SectionDocument10 pagesSegamat High 2018T2 TRIAL Section A (45 Marks) Answer All Questions in This SectionNorbert LimNo ratings yet
- Eoc3 (Q) - S2 - 2021 - 2022 DBM10013Document2 pagesEoc3 (Q) - S2 - 2021 - 2022 DBM10013Shazryl DanielNo ratings yet
- List of FormulasDocument1 pageList of FormulasKenzy Waleed SolimanNo ratings yet
- AP Physics C EquationsDocument3 pagesAP Physics C EquationsJabeenAhmedNo ratings yet
- Adding Vectors That Are Not Perpendicular: Holt Physics Chapter 3 Section 2 (Continued)Document11 pagesAdding Vectors That Are Not Perpendicular: Holt Physics Chapter 3 Section 2 (Continued)Mary Ann DimacaliNo ratings yet
- UCOE-UCSC Math 23B - Calculus 4 (Spring 17) - Section 17.2 PDFDocument22 pagesUCOE-UCSC Math 23B - Calculus 4 (Spring 17) - Section 17.2 PDFMorvaridYiNo ratings yet
- Spin-Orbit Resonance in Planetary Bodies: Harsh MenonDocument17 pagesSpin-Orbit Resonance in Planetary Bodies: Harsh Menonmenon.harshNo ratings yet
- Homework 2 PDFDocument6 pagesHomework 2 PDF鄧新弘No ratings yet
- Exercises Vector - Calculus - Module3TN - AM - 2021-2022Document2 pagesExercises Vector - Calculus - Module3TN - AM - 2021-2022akdjfNo ratings yet
- Eshelby 1959Document10 pagesEshelby 1959Rodrigo Peluci de FigueiredoNo ratings yet