You might also like
- Lab - Redes ComunicaciondocxDocument6 pagesLab - Redes Comunicaciondocxmaquina1No ratings yet
- Clase 08 Intro SeguridadDocument27 pagesClase 08 Intro Seguridadmaquina1No ratings yet
- Inf 2Document7 pagesInf 2maquina1No ratings yet
- Convertidor FlybackDocument16 pagesConvertidor Flybackmaquina1No ratings yet
- P 1 SistemaseconomicoDocument6 pagesP 1 Sistemaseconomicomaquina1No ratings yet
- Clase 08 Intro SeguridadDocument27 pagesClase 08 Intro Seguridadmaquina1No ratings yet
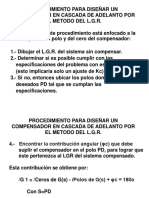
- Diseño de compensador en cascada de adelanto por el método del LGRDocument17 pagesDiseño de compensador en cascada de adelanto por el método del LGRmaquina1No ratings yet
- Taller Innovacion Avance Pre1Document2 pagesTaller Innovacion Avance Pre1maquina1No ratings yet
- Cap7 MosfetDocument51 pagesCap7 MosfetAldo SalazarNo ratings yet
- P 2 SistemaseconomicoDocument7 pagesP 2 Sistemaseconomicomaquina1No ratings yet
- Lab1 Redes ComunicDocument2 pagesLab1 Redes Comunicmaquina1No ratings yet
- Redes Comunicacion p1Document5 pagesRedes Comunicacion p1maquina1No ratings yet
- CSA08 5 ModulacionesDigitales - 2p PDFDocument31 pagesCSA08 5 ModulacionesDigitales - 2p PDFberrada_9No ratings yet
- Circuitos de DisparoDocument12 pagesCircuitos de DisparoEvi Perez80% (5)
- Circuitos de DisparoDocument1 pageCircuitos de Disparomaquina1No ratings yet
- Dato Lab TelecoDocument5 pagesDato Lab Telecomaquina1No ratings yet
- Formulario OpticasDocument1 pageFormulario Opticasmaquina1No ratings yet
- Informe TelecoDocument10 pagesInforme Telecomaquina1No ratings yet
- Informe 3Document10 pagesInforme 3maquina1No ratings yet
- Variables de EstadoDocument21 pagesVariables de Estadomaquina1No ratings yet
- InfoPLC Net Curso Avanzado FatekDocument109 pagesInfoPLC Net Curso Avanzado FatekdayyanetNo ratings yet
- Presentación 1Document9 pagesPresentación 1maquina1No ratings yet
- Implementar lazo de control cerrado PI sobre proceso RCDocument9 pagesImplementar lazo de control cerrado PI sobre proceso RCmaquina1No ratings yet
- Avance PreeliminarDocument1 pageAvance Preeliminarmaquina1No ratings yet
- Laboratorio NDocument10 pagesLaboratorio Nmaquina1No ratings yet
- Avance PreeliminarDocument1 pageAvance Preeliminarmaquina1No ratings yet
- 01 Modelos Lineales de PLDocument8 pages01 Modelos Lineales de PLmaquina1No ratings yet
- Clases4 5RRHHDocument51 pagesClases4 5RRHHmaquina1No ratings yet
- Impacto redes sociales adolescenciaDocument7 pagesImpacto redes sociales adolescenciaAllisonAcevedoNo ratings yet
- Sesion de Aprendizaje de Ciencia y Tecnologia Viernes 31 de MarzoDocument10 pagesSesion de Aprendizaje de Ciencia y Tecnologia Viernes 31 de MarzoGabriela Alemán Monzon100% (1)
- Relacion Medico-Paciente LibroDocument120 pagesRelacion Medico-Paciente Libroedwin quispelaya100% (2)
- Lab - 05 - A - Electrohidráulica y Electroneumática IDocument30 pagesLab - 05 - A - Electrohidráulica y Electroneumática Imiguel angel fuentes saavedraNo ratings yet
- Unidad 3 - Tarea 4 - Kevin - RodriguezDocument8 pagesUnidad 3 - Tarea 4 - Kevin - RodriguezKevin RodriguezNo ratings yet
- Taller Generalidades Del CODocument3 pagesTaller Generalidades Del COAlbert RuizNo ratings yet
- BENTRE24 Grilla de EvaluacionDocument2 pagesBENTRE24 Grilla de EvaluacionAgus MontiNo ratings yet
- GSM y GPRSDocument3 pagesGSM y GPRSKEvinLalanGuiNo ratings yet
- Como Usar El Tester para Fuentes de Poder de ComputadoraDocument3 pagesComo Usar El Tester para Fuentes de Poder de ComputadoracasiguanaNo ratings yet
- Nancy Maria - Serpa Paternina - Act 2.1. Ensayo PDFDocument8 pagesNancy Maria - Serpa Paternina - Act 2.1. Ensayo PDFnancyNo ratings yet
- Es U2 Parte1 Camilocarmona FranciscoperezDocument10 pagesEs U2 Parte1 Camilocarmona FranciscoperezfranciscoptNo ratings yet
- Magda Serrano AnálisisYDiseñoDocument13 pagesMagda Serrano AnálisisYDiseñoLorena Serrano100% (1)
- Plan de MantenimientoDocument4 pagesPlan de MantenimientoNelson HercillaNo ratings yet
- Brilliance V7 2022 ECDocument4 pagesBrilliance V7 2022 ECsancuilmasNo ratings yet
- Diaria02 WebDocument64 pagesDiaria02 WebAldoNo ratings yet
- Informe RTDDocument7 pagesInforme RTDJavier Camilo Aldana Barrera100% (1)
- Evaluacion Practica Procesos Constructivos Integrales y AcabadosDocument45 pagesEvaluacion Practica Procesos Constructivos Integrales y Acabadosjahtner paez morgadoNo ratings yet
- Lectura - Ingeniería, Tecnología y Organización Del Proyecto m6 - ProyinDocument4 pagesLectura - Ingeniería, Tecnología y Organización Del Proyecto m6 - ProyinJorge MartinNo ratings yet
- Diagrama de Pareto para mejorar la producción en empresa metalmecánicaDocument14 pagesDiagrama de Pareto para mejorar la producción en empresa metalmecánicaJair Huapaya ParionaNo ratings yet
- Perfil profesional ingeniero electrónicoDocument4 pagesPerfil profesional ingeniero electrónicoAlex DiazNo ratings yet
- 8.3.1.3 Packet Tracer - Skills Integrated ChallengeDocument2 pages8.3.1.3 Packet Tracer - Skills Integrated Challengegabriela ugaldeNo ratings yet
- Reporte - Practica 11Document7 pagesReporte - Practica 11Jose LermaNo ratings yet
- Desarrollo Guia 1 InducciónDocument15 pagesDesarrollo Guia 1 InducciónCARLOS MANUEL FERNÁNDEZ ROJASNo ratings yet
- Sistema Citas MedicasDocument4 pagesSistema Citas MedicasAllanEgasNo ratings yet
- Guía Nº2 Exp. Rendimiento VolumétricoDocument7 pagesGuía Nº2 Exp. Rendimiento VolumétricoDavid GonzalezNo ratings yet
- Desarrollo y Uso Didáctico de GeogebraDocument478 pagesDesarrollo y Uso Didáctico de GeogebraMarlon Gama Quintero100% (13)
- Minería de datos y opinionesDocument8 pagesMinería de datos y opinionesIrene ValenciaNo ratings yet
- Actividad 1 RedesDocument3 pagesActividad 1 RedesViktor AgüeroNo ratings yet
- Dirección Correo Teléfono: La Paz / Bolivia - Zona Alta / Zona CheckDocument9 pagesDirección Correo Teléfono: La Paz / Bolivia - Zona Alta / Zona CheckHector Sacaca aliagaNo ratings yet
- Informe Laboratorio2Document10 pagesInforme Laboratorio2Yair Sebastian Herrera VegaNo ratings yet