You might also like
- Employee Central Payroll PDFDocument4 pagesEmployee Central Payroll PDFMohamed ShanabNo ratings yet
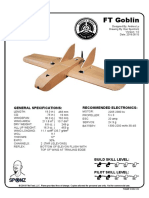
- FT Goblin Full SizeDocument7 pagesFT Goblin Full SizeDeakon Frost100% (1)
- C79 Service Kit and Parts List GuideDocument32 pagesC79 Service Kit and Parts List Guiderobert100% (2)
- 02 - Fundamentals of Ethernet LANsDocument36 pages02 - Fundamentals of Ethernet LANsAdetayo OnanugaNo ratings yet
- BAR Digest MenuDocument4 pagesBAR Digest MenuFloila Jane YmasNo ratings yet
- Take Private Profit Out of Medicine: Bethune Calls for Socialized HealthcareDocument5 pagesTake Private Profit Out of Medicine: Bethune Calls for Socialized HealthcareDoroteo Jose Station100% (1)
- M Block PDFDocument45 pagesM Block PDFKristina ViskovićNo ratings yet
- Impact of Artificial Intelligence On E MarketingDocument14 pagesImpact of Artificial Intelligence On E MarketingResearch ParkNo ratings yet
- Step by Step Guide To Using Audacity: Installing Audacity and The LAME MP3 Encoder at The End of This DocumentDocument17 pagesStep by Step Guide To Using Audacity: Installing Audacity and The LAME MP3 Encoder at The End of This Documentadura14No ratings yet
- Mechanics Logo Designing Contest - SampleDocument2 pagesMechanics Logo Designing Contest - SamplePeter MilesNo ratings yet
- Excel Grade 7-8Document6 pagesExcel Grade 7-8Francisco RaymartNo ratings yet
- Arduino TutorialDocument280 pagesArduino TutorialRohitNo ratings yet
- Python Programming for GeographersDocument118 pagesPython Programming for GeographersPetru Andrei VanturNo ratings yet
- Brute Force MethodDocument6 pagesBrute Force Methodnasir jaanNo ratings yet
- Finite State Machines NotesDocument6 pagesFinite State Machines Notesemilzaev01No ratings yet
- Diylab Tinkercad Arduino ModuleDocument10 pagesDiylab Tinkercad Arduino ModuleYani TokoNo ratings yet
- 139-Hospital Management System - SynopsisDocument6 pages139-Hospital Management System - SynopsismcaprojectsNo ratings yet
- Input and Output DevicesDocument34 pagesInput and Output DevicesShivanya AnilNo ratings yet
- ICTL - Overview of Computer SystemDocument18 pagesICTL - Overview of Computer SystemRosiadi84100% (6)
- 2023 2025 SyllabusDocument55 pages2023 2025 Syllabusolawuyi greatNo ratings yet
- OCR Comp Sci WB 1 AnswersDocument28 pagesOCR Comp Sci WB 1 AnswersPenny AllsoppNo ratings yet
- A Study On The Applications and Impact of Artificial Intelligence in E Commerce IndustryDocument3 pagesA Study On The Applications and Impact of Artificial Intelligence in E Commerce IndustryEditor IJTSRDNo ratings yet
- OCR GCSE Computing Unit A451: Computer Systems and Programming Section 2.1.2 HardwareDocument8 pagesOCR GCSE Computing Unit A451: Computer Systems and Programming Section 2.1.2 Hardwarerobertz_tolentino014No ratings yet
- 2.1.1 Overview of Computer SystemDocument41 pages2.1.1 Overview of Computer Systemmal887No ratings yet
- 1.2 Communication and Internet Technologies Workbook by Inqilab Patel PDFDocument97 pages1.2 Communication and Internet Technologies Workbook by Inqilab Patel PDFAditya GhoseNo ratings yet
- Lab Manual Csc103 PF v2.1Document119 pagesLab Manual Csc103 PF v2.1Muhammad AyazNo ratings yet
- Python Lecture Notes III UnitsDocument21 pagesPython Lecture Notes III UnitsEmo ChNo ratings yet
- Revised A LevelDocument180 pagesRevised A LevelmohitadmnNo ratings yet
- 36998-Year 9 - PYTHON Unit Teachers GuideDocument12 pages36998-Year 9 - PYTHON Unit Teachers GuideOsman AhmedNo ratings yet
- Alogorithm & Prolem SolvingDocument77 pagesAlogorithm & Prolem SolvingChimuka Chikonga100% (1)
- Notes For PracticalDocument49 pagesNotes For PracticalAliMushtaqNo ratings yet
- Python Workbook 2Document10 pagesPython Workbook 2DBNo ratings yet
- Data StructuresDocument613 pagesData StructuresJai BishnoiNo ratings yet
- 1.1 Data Representation Workbook by Inqilab PatelDocument96 pages1.1 Data Representation Workbook by Inqilab PatelShakila ShakiNo ratings yet
- Nyquist TheoremDocument16 pagesNyquist TheoremNicholas WilsonNo ratings yet
- Complete C & Data Structure NotesDocument195 pagesComplete C & Data Structure NotesLatchireddy ManojkumarNo ratings yet
- Machine Learning Lab Report on Housing DataDocument15 pagesMachine Learning Lab Report on Housing DataNikhilesh PrabhakarNo ratings yet
- Chapter-5 Processor FundamentalsDocument16 pagesChapter-5 Processor FundamentalsVimal VijayakumarNo ratings yet
- IGCSE ICT Mock On Revision Notes 1Document8 pagesIGCSE ICT Mock On Revision Notes 1rahimuddin100% (1)
- Algorithms NotesDocument93 pagesAlgorithms NotesPrajakta BagalNo ratings yet
- Excel Project FinalDocument38 pagesExcel Project FinalhimanshiNo ratings yet
- Caie As Computer Science 9618 Practical v3Document9 pagesCaie As Computer Science 9618 Practical v3Nathaniel BasukiNo ratings yet
- Number SystemsDocument22 pagesNumber Systemssullivan583No ratings yet
- Introduction To C Programming Course MaterailDocument161 pagesIntroduction To C Programming Course Materailmohammedgousmujahid100% (1)
- EmbeddedCProgrammingV1 1Document447 pagesEmbeddedCProgrammingV1 1Ahmed Nour0% (1)
- Computer Hardware Servicing LecturesDocument244 pagesComputer Hardware Servicing LecturesGladysNo ratings yet
- Cambridge O Level Computer Science: Pseudocode Guide For TeachersDocument16 pagesCambridge O Level Computer Science: Pseudocode Guide For TeachersSyed Umair AnwerNo ratings yet
- EPOM F OBE ASSIGNMENT Shuvro Sankar Sen 18-37524-1Document7 pagesEPOM F OBE ASSIGNMENT Shuvro Sankar Sen 18-37524-1Shuvro Sankar SenNo ratings yet
- Von Neumann Architecture ExplainedDocument8 pagesVon Neumann Architecture ExplainedDinesh KumarNo ratings yet
- 4CP0 02 Que 20201117Document24 pages4CP0 02 Que 20201117Mahir ShahriyarNo ratings yet
- Generations of Cellular SystemsDocument11 pagesGenerations of Cellular SystemsAnam FaisalNo ratings yet
- IGCSE ICT TeachingSuggestions PDFDocument4 pagesIGCSE ICT TeachingSuggestions PDFLaxmi Rao లక్ష్మిNo ratings yet
- SWI-Prolog-7 4 1Document580 pagesSWI-Prolog-7 4 1Josel RlNo ratings yet
- Computer 8T1 Tutorial 2021 2022Document21 pagesComputer 8T1 Tutorial 2021 2022FaheemNo ratings yet
- FUZZY LOGIC - AN INTRODUCTIONDocument48 pagesFUZZY LOGIC - AN INTRODUCTIONMani Bharath NutiNo ratings yet
- Closed Loop SystemsDocument11 pagesClosed Loop SystemsMohamed RashidNo ratings yet
- Ambo university MENG 5272 chapter on linear systemsDocument20 pagesAmbo university MENG 5272 chapter on linear systemsFikadu EshetuNo ratings yet
- Closed Loop Control System ExplainedDocument6 pagesClosed Loop Control System ExplainedMUHAMMAD AKRAMNo ratings yet
- Model Reference Adaptive Control (MRAC) Theory and ApplicationDocument22 pagesModel Reference Adaptive Control (MRAC) Theory and Applicationasusd112550% (4)
- Power Systems PROJECTS WITH ABSTRACTDocument5 pagesPower Systems PROJECTS WITH ABSTRACTElangovan SekarNo ratings yet
- Feedback Control: InherentDocument5 pagesFeedback Control: InherentRabi Shankar ShilNo ratings yet
- Synergetic ControlDocument13 pagesSynergetic Controlrostamkola1229No ratings yet
- EDI810Document11 pagesEDI810ramcheran2020No ratings yet
- Emperger's pioneering composite columnsDocument11 pagesEmperger's pioneering composite columnsDishant PrajapatiNo ratings yet
- Chapter 1 Qus OnlyDocument28 pagesChapter 1 Qus OnlySaksharNo ratings yet
- 2020-05-14 County Times NewspaperDocument32 pages2020-05-14 County Times NewspaperSouthern Maryland OnlineNo ratings yet
- Qatar Airways E-ticket Receipt for Travel from Baghdad to AthensDocument1 pageQatar Airways E-ticket Receipt for Travel from Baghdad to Athensمحمد الشريفي mohammed alshareefiNo ratings yet
- RAP Submission Form, OBIDocument3 pagesRAP Submission Form, OBIAhmed MustafaNo ratings yet
- AHP for Car SelectionDocument41 pagesAHP for Car SelectionNguyên BùiNo ratings yet
- Philippine Architecture, Film Industry EvolutionDocument4 pagesPhilippine Architecture, Film Industry EvolutionCharly Mint Atamosa IsraelNo ratings yet
- Discursive Closure and Discursive Openings in SustainabilityDocument10 pagesDiscursive Closure and Discursive Openings in SustainabilityRenn MNo ratings yet
- Ten Golden Rules of LobbyingDocument1 pageTen Golden Rules of LobbyingChaibde DeNo ratings yet
- Wind EnergyDocument6 pagesWind Energyshadan ameenNo ratings yet
- OBHR Case StudyDocument8 pagesOBHR Case StudyYvonne TanNo ratings yet
- ASME Y14.6-2001 (R2007), Screw Thread RepresentationDocument27 pagesASME Y14.6-2001 (R2007), Screw Thread RepresentationDerekNo ratings yet
- CTS experiments comparisonDocument2 pagesCTS experiments comparisonmanojkumarNo ratings yet
- Make a Battery Level Indicator using LM339 ICDocument13 pagesMake a Battery Level Indicator using LM339 ICnelson100% (1)
- Open Compute Project AMD Motherboard Roadrunner 2.1 PDFDocument36 pagesOpen Compute Project AMD Motherboard Roadrunner 2.1 PDFakok22No ratings yet
- 1LE1503-2AA43-4AA4 Datasheet enDocument1 page1LE1503-2AA43-4AA4 Datasheet enAndrei LupuNo ratings yet
- Elementary School: Cash Disbursements RegisterDocument1 pageElementary School: Cash Disbursements RegisterRonilo DagumampanNo ratings yet
- Discretionary Lending Power Updated Sep 2012Document28 pagesDiscretionary Lending Power Updated Sep 2012akranjan888No ratings yet
- Meanwhile Elsewhere - Lizzie Le Blond.1pdfDocument1 pageMeanwhile Elsewhere - Lizzie Le Blond.1pdftheyomangamingNo ratings yet
- Okuma Osp5000Document2 pagesOkuma Osp5000Zoran VujadinovicNo ratings yet
- Magnetism 02Document10 pagesMagnetism 02Niharika DeNo ratings yet
- Conversion of Units of Temperature - Wikipedia, The Free Encyclopedia PDFDocument7 pagesConversion of Units of Temperature - Wikipedia, The Free Encyclopedia PDFrizal123No ratings yet
- 9IMJan 4477 1Document9 pages9IMJan 4477 1Upasana PadhiNo ratings yet
- Database Chapter 11 MCQs and True/FalseDocument2 pagesDatabase Chapter 11 MCQs and True/FalseGauravNo ratings yet