You might also like
- Unmanned Aerial Systems: Theoretical Foundation and ApplicationsFrom EverandUnmanned Aerial Systems: Theoretical Foundation and ApplicationsNo ratings yet
- 2015 Velez Certad Ruiz TrajectorygenerationandtrackingusingtheAR - DronequadcopterDocument7 pages2015 Velez Certad Ruiz TrajectorygenerationandtrackingusingtheAR - DronequadcopterJean Claude SanganoNo ratings yet
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentFrom EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentNo ratings yet
- (J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter DroneDocument13 pages(J) - 2024 - Vision-Based Autonomous Landing and Charging System For A Hexacopter Dronedr.awawdeh.moathNo ratings yet
- HILSDocument8 pagesHILSsakthi ambroseNo ratings yet
- DSCC2020-3319: Developmental Reinforcement Learning of Control Policy of A Quadcopter Uav With Thrust Vectoring RotorsDocument10 pagesDSCC2020-3319: Developmental Reinforcement Learning of Control Policy of A Quadcopter Uav With Thrust Vectoring Rotorssamiadem1099No ratings yet
- ImplementationofAutonomousVisualDetection v6 RGDocument7 pagesImplementationofAutonomousVisualDetection v6 RGIshali SandbhorNo ratings yet
- Mics2010 Submission 36 PDFDocument11 pagesMics2010 Submission 36 PDFPravin PatilNo ratings yet
- Preprints201808 0313 v1Document12 pagesPreprints201808 0313 v1Abdul Hadi ButtNo ratings yet
- Controlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorDocument11 pagesControlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorJoe ReninNo ratings yet
- Electronics: Accurate Landing of Unmanned Aerial Vehicles Using Ground Pattern RecognitionDocument16 pagesElectronics: Accurate Landing of Unmanned Aerial Vehicles Using Ground Pattern RecognitionKiraNo ratings yet
- FYP Research Paper SSUET FINALDocument5 pagesFYP Research Paper SSUET FINALNabeel ShahzadNo ratings yet
- Dynamic Modeling and Control Techniques For A Quadrotor: January 2015Document10 pagesDynamic Modeling and Control Techniques For A Quadrotor: January 2015Naier NabilNo ratings yet
- Modeling and Simulation of An Octorotor UAV With Manipulator ArmDronesDocument27 pagesModeling and Simulation of An Octorotor UAV With Manipulator ArmDronesUSHANKA PERUNo ratings yet
- The Giant Machine That Constructs Whole BridgesDocument40 pagesThe Giant Machine That Constructs Whole BridgesNikesh RamNo ratings yet
- Quadrotor Helicopter Trajectory Tracking Control PDFDocument14 pagesQuadrotor Helicopter Trajectory Tracking Control PDFhw606No ratings yet
- Design and Experimental Comparison of PID, LQR and MPC MamboDocument21 pagesDesign and Experimental Comparison of PID, LQR and MPC MamboPedro Cezar Rodrigues BaltazarNo ratings yet
- Design and Implementation of Autonomous Quadcopter Using SITL SimulatorDocument16 pagesDesign and Implementation of Autonomous Quadcopter Using SITL SimulatorstefanoNo ratings yet
- Collaborative Quadricopter-Mobile Robots Ground Scan Using ARTAGS Visual Pose EstimationDocument6 pagesCollaborative Quadricopter-Mobile Robots Ground Scan Using ARTAGS Visual Pose EstimationHarsha Vardhan BaleNo ratings yet
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexampleNo ratings yet
- 3-D Indoor Navigation and Autonomous Flight of A M PDFDocument7 pages3-D Indoor Navigation and Autonomous Flight of A M PDFkhoamaiNo ratings yet
- Relative Position-Based Collision Avoidance System For Swarming UAVS Using Multi-Sensor FusionDocument7 pagesRelative Position-Based Collision Avoidance System For Swarming UAVS Using Multi-Sensor FusionmiguelNo ratings yet
- Design and Analysis of Solar QuadcopterDocument10 pagesDesign and Analysis of Solar Quadcoptersaumya irugalbandaraNo ratings yet
- Air TO Air UAV DETECTIONDocument3 pagesAir TO Air UAV DETECTIONthinkableofficialhandleNo ratings yet
- PDF - Js Viewe5rDocument4 pagesPDF - Js Viewe5rPranoy MukherjeeNo ratings yet
- Real Time and Post-Processing Flight Inspection by Drone: A ReviewDocument8 pagesReal Time and Post-Processing Flight Inspection by Drone: A Reviewfika puteraNo ratings yet
- DLSU ResCon 2017 Paper 110Document6 pagesDLSU ResCon 2017 Paper 110Ralph Laurence Garcia VisayaNo ratings yet
- Design, Trajectory Generation and Control of Quadrotor Research PlatformDocument8 pagesDesign, Trajectory Generation and Control of Quadrotor Research PlatformTiến HồNo ratings yet
- Developing of A Video-Based Model For UAV Autonomous NavigationDocument12 pagesDeveloping of A Video-Based Model For UAV Autonomous NavigationChrisnaj HuEkOЯnNo ratings yet
- Attitude and Position Controller Design and Implem PDFDocument11 pagesAttitude and Position Controller Design and Implem PDFGeorge ChenNo ratings yet
- A Control Method For Hydraulic Manipulators in Automatic Emulsion FillingDocument8 pagesA Control Method For Hydraulic Manipulators in Automatic Emulsion FillingJeffrey Fernandez SalazarNo ratings yet
- Design and Analysis of An Unmaaned Aerial VehicleDocument8 pagesDesign and Analysis of An Unmaaned Aerial VehicleDeb PradhanNo ratings yet
- Blackrgdsfdasgd SG DSD Gdgs D Gaweagdasddasg Asdfkjfjd S F Kdnfkjnafk KN KNNSD nsndlsanODNa Nfdand NANDSANNAsnlanFONEDocument12 pagesBlackrgdsfdasgd SG DSD Gdgs D Gaweagdasddasg Asdfkjfjd S F Kdnfkjnafk KN KNNSD nsndlsanODNa Nfdand NANDSANNAsnlanFONEHariharanNo ratings yet
- Jamris Review Assignment 740 Article 909Document26 pagesJamris Review Assignment 740 Article 909ANH TUAN PHAMNo ratings yet
- Trajectory Tracking of AR DroneDocument10 pagesTrajectory Tracking of AR DroneIvan Alexis Manning LuckNo ratings yet
- Serhat 2022 Development Stages of A Semi Autonomous Underwater Vehicle Experiment PlatformDocument21 pagesSerhat 2022 Development Stages of A Semi Autonomous Underwater Vehicle Experiment PlatformJefin MarshalNo ratings yet
- Full TextDocument2 pagesFull TextLaura Rua BassNo ratings yet
- Landing Pad - 1Document5 pagesLanding Pad - 1stealthcenaNo ratings yet
- Autonomous Quadcopter Precision Landing Onto A Heaving Platform New Method and ExperimentDocument11 pagesAutonomous Quadcopter Precision Landing Onto A Heaving Platform New Method and Experiment20151312No ratings yet
- Sensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVDocument8 pagesSensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVSemih AteşNo ratings yet
- Accurate Modeling and Robust Hovering Control For A Quad-Rotor VTOL AircraftDocument19 pagesAccurate Modeling and Robust Hovering Control For A Quad-Rotor VTOL AircraftIkeaMonsterNo ratings yet
- Autonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMDocument6 pagesAutonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMAdeeba AliNo ratings yet
- Design and Analysis of Navigator Quad Copter For Autonomous VehiclesDocument3 pagesDesign and Analysis of Navigator Quad Copter For Autonomous VehiclesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design and ImplementationDocument4 pagesDesign and ImplementationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Modeling Simulation and Implementation oDocument6 pagesModeling Simulation and Implementation oMarisol MbNo ratings yet
- DLSU ResCon 2017 Paper 110Document6 pagesDLSU ResCon 2017 Paper 110Ralph Laurence G VisayaNo ratings yet
- IJETR021664Document5 pagesIJETR021664erpublicationNo ratings yet
- AR-Drone As A Platform For Robotic Research and Education: (Tkrajnik, Vonasek, Danfis, Xfaigl) @labe - Felk.cvut - CZDocument15 pagesAR-Drone As A Platform For Robotic Research and Education: (Tkrajnik, Vonasek, Danfis, Xfaigl) @labe - Felk.cvut - CZSusi Yayang AstrianiNo ratings yet
- SysToL 2019 Paper2Document7 pagesSysToL 2019 Paper2pep5656No ratings yet
- Design of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterDocument6 pagesDesign of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterZelalem TarekegnNo ratings yet
- Cho 2014Document8 pagesCho 2014MartinFabretNo ratings yet
- Autonomousquad Final3Document7 pagesAutonomousquad Final3Kanekii HaiseNo ratings yet
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocument10 pagesAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariNo ratings yet
- 6.an AUV Vision System For Target Detection and Precise PositioningDocument8 pages6.an AUV Vision System For Target Detection and Precise PositioningMilton AlvaradoNo ratings yet
- A Survey On Unmanned Vehicles Techniques For Terrain Detection in 3D EnvironmentDocument3 pagesA Survey On Unmanned Vehicles Techniques For Terrain Detection in 3D EnvironmentInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 1159pm 20.epra Journals-6704Document7 pages1159pm 20.epra Journals-6704Akash ShevateNo ratings yet
- Design of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterDocument5 pagesDesign of Self-Tuning PID Controller Parameters Using Fuzzy Logic Controller For Quad-Rotor HelicopterGál Károly-IstvánNo ratings yet
- Vision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDocument5 pagesVision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDRathikaNo ratings yet
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 pagesTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryNo ratings yet
- 3-D Indoor Navigation and Autonomous Flight of A M PDFDocument7 pages3-D Indoor Navigation and Autonomous Flight of A M PDFkhoamaiNo ratings yet
- Mechatronics Design of A Mobile Robot System: February 2013Document15 pagesMechatronics Design of A Mobile Robot System: February 2013khoamaiNo ratings yet
- A Funnel-Shaped Probe For Sensitivity Enhancement in Pulse-Modulationeddy Current Inspection of Subsurface Flaws in ConductorsDocument25 pagesA Funnel-Shaped Probe For Sensitivity Enhancement in Pulse-Modulationeddy Current Inspection of Subsurface Flaws in ConductorskhoamaiNo ratings yet
- Frequency Domain Analysis of Magnetic Field Images Obtained Using TMR Arraysensors For Subsurface Defect Detection and Quantification PDFDocument17 pagesFrequency Domain Analysis of Magnetic Field Images Obtained Using TMR Arraysensors For Subsurface Defect Detection and Quantification PDFkhoamaiNo ratings yet
- Survey of Methods of Combining Velocity Profiles With Position ControlDocument6 pagesSurvey of Methods of Combining Velocity Profiles With Position ControlkhoamaiNo ratings yet
- Gstreamer IntroductionDocument5 pagesGstreamer IntroductionkhoamaiNo ratings yet
- Control System Design of An Vtol Fixed-Wing AircraftDocument4 pagesControl System Design of An Vtol Fixed-Wing AircraftkhoamaiNo ratings yet
- Flabeg Solar enDocument11 pagesFlabeg Solar enZeec NoorNo ratings yet
- BX-74 / BX-78: Sliding Gate Operator BX SeriesDocument24 pagesBX-74 / BX-78: Sliding Gate Operator BX SeriesStefce PetrovNo ratings yet
- 02 MF Anchors PDFDocument13 pages02 MF Anchors PDFThaksenNo ratings yet
- Bloor Research On Data MigrationDocument13 pagesBloor Research On Data MigrationivahdamNo ratings yet
- PPAPDocument2 pagesPPAPVlad NitaNo ratings yet
- Debug 1214Document3 pagesDebug 1214Anonymous B4WiRjNo ratings yet
- 1st Indian Near Surface Geophysics BrochureDocument4 pages1st Indian Near Surface Geophysics BrochureAdarsh TanejaNo ratings yet
- Manual Kls MartinDocument27 pagesManual Kls MartinChris AliNo ratings yet
- Shaft Design Problem 10 - 12Document9 pagesShaft Design Problem 10 - 12BernalynMalinaoNo ratings yet
- 02 - Student Lesson 2 Pile Driving SystemDocument91 pages02 - Student Lesson 2 Pile Driving SystemdannyzuanNo ratings yet
- Astm A769 PDFDocument5 pagesAstm A769 PDFCristian OtivoNo ratings yet
- UAMDocument35 pagesUAMVishnu R PuthusseryNo ratings yet
- 17 Free Data Science Projects To Boost Your Knowledge & SkillsDocument18 pages17 Free Data Science Projects To Boost Your Knowledge & SkillshamedfazelmNo ratings yet
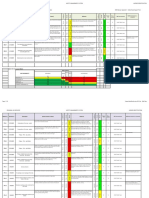
- Hazard-Identification Dec 2015Document22 pagesHazard-Identification Dec 2015Dumitru EninNo ratings yet
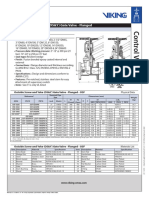
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 pagesOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNo ratings yet
- Oracle Exadata Technical Series: Smart ScanDocument59 pagesOracle Exadata Technical Series: Smart ScanVishnusivathej PotukanumaNo ratings yet
- HP40 NBDocument13 pagesHP40 NBTarun ChandraNo ratings yet
- BC 20s HandbuchDocument173 pagesBC 20s HandbuchmanoharNo ratings yet
- ES - 1NZ-FXE Engine Control SystemDocument480 pagesES - 1NZ-FXE Engine Control SystemHari Prasad Ambaripeta84% (19)
- Product Catalogue: Your Specialist in Flow DrillingDocument64 pagesProduct Catalogue: Your Specialist in Flow DrillingВасяNo ratings yet
- Deaton FE Slab DesignDocument57 pagesDeaton FE Slab DesignMohamed AliNo ratings yet
- Da10 Air Cooled Engine (Appn Code D3.2007 & D3Document26 pagesDa10 Air Cooled Engine (Appn Code D3.2007 & D3Sandeep NikhilNo ratings yet
- DNF Stand PipeDocument3 pagesDNF Stand PipeChristopher BrownNo ratings yet
- Seismic Force CANADA Code - CNBC2005-V421Document7 pagesSeismic Force CANADA Code - CNBC2005-V421Niko NištićNo ratings yet
- Electrochemical Measurement of Diffusible Hydrogen in Steels (Barnacle Electrode)Document6 pagesElectrochemical Measurement of Diffusible Hydrogen in Steels (Barnacle Electrode)Faiber AndrésNo ratings yet
- Production ManagementDocument81 pagesProduction ManagementrrathoreNo ratings yet
- KEDDCO BinderDocument74 pagesKEDDCO BinderWillian FigueroaNo ratings yet
- Entreprise Programming Lab - Skill WorkbookV1.0Document198 pagesEntreprise Programming Lab - Skill WorkbookV1.0Dhanush Parasa40% (5)
- 80010360Document2 pages80010360mdisicNo ratings yet
- Stelzer Catalog PDFDocument12 pagesStelzer Catalog PDFlhphong021191No ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeRating: 5 out of 5 stars5/5 (1)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathFrom EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathRating: 5 out of 5 stars5/5 (1)