You might also like
- Case S02 01Document5 pagesCase S02 01jnfzNo ratings yet
- Macroeconomics - Econ202A: Hall, (1978)Document3 pagesMacroeconomics - Econ202A: Hall, (1978)jnfzNo ratings yet
- COMP 4332, RMBI 4330 Advanced Data Mining (Spring 2012) : Qiang YangDocument9 pagesCOMP 4332, RMBI 4330 Advanced Data Mining (Spring 2012) : Qiang YangjnfzNo ratings yet
- E07 Indexing IntroDocument8 pagesE07 Indexing IntrojnfzNo ratings yet
- The Hong Kong University of Science and Technology Calendar Dates in The 2018-19 Academic YearDocument2 pagesThe Hong Kong University of Science and Technology Calendar Dates in The 2018-19 Academic YearjnfzNo ratings yet
- 4 2. SequencesDocument39 pages4 2. SequencesjnfzNo ratings yet
- Session 9 v1Document24 pagesSession 9 v1jnfzNo ratings yet
- L10 Midterm ReviewDocument15 pagesL10 Midterm ReviewjnfzNo ratings yet
- L16 Leadership Power SDocument32 pagesL16 Leadership Power Sjnfz100% (1)
- L14 Communication SDocument22 pagesL14 Communication SjnfzNo ratings yet
- Lecture 4 COMP2611 ISA Part1Document32 pagesLecture 4 COMP2611 ISA Part1jnfzNo ratings yet
- L1 Financial Institutions and Markets - NewDocument28 pagesL1 Financial Institutions and Markets - NewjnfzNo ratings yet
- L15 Conflict Management SDocument18 pagesL15 Conflict Management SjnfzNo ratings yet
- Chap1&2 PDFDocument5 pagesChap1&2 PDFjnfzNo ratings yet
- L7 - Emotions, Attitudes, and Stress - SDocument51 pagesL7 - Emotions, Attitudes, and Stress - SjnfzNo ratings yet
- Lecture 9 COMP2611 Processor Part1Document39 pagesLecture 9 COMP2611 Processor Part1jnfzNo ratings yet
- Lecture 7 COMP2611 Arithmetic Part1Document33 pagesLecture 7 COMP2611 Arithmetic Part1jnfzNo ratings yet
- L2 - Intro To OB - SDocument42 pagesL2 - Intro To OB - SjnfzNo ratings yet
- 0 IntroductionDocument43 pages0 IntroductionjnfzNo ratings yet
- Lecture 11 H.avlDocument34 pagesLecture 11 H.avljnfzNo ratings yet
- Lecture 1 COMP2611 Introduction Spring2018Document34 pagesLecture 1 COMP2611 Introduction Spring2018jnfzNo ratings yet
- Lecture 11 COMP2611 Processor Part3Document41 pagesLecture 11 COMP2611 Processor Part3jnfzNo ratings yet
- Object-Oriented Programming and Data Structures COMP2012: Separate Compilation and MakefileDocument17 pagesObject-Oriented Programming and Data Structures COMP2012: Separate Compilation and MakefilejnfzNo ratings yet
- Lecture 1 H.oop-IntroDocument23 pagesLecture 1 H.oop-IntrojnfzNo ratings yet
- Object-Oriented Programming and Data Structures COMP2012: Data Abstraction & ClassesDocument52 pagesObject-Oriented Programming and Data Structures COMP2012: Data Abstraction & ClassesjnfzNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 8: Discrete Probability Distributions: Ms. Amna RiazDocument2 pagesChapter 8: Discrete Probability Distributions: Ms. Amna RiazSyed Ifran ejazNo ratings yet
- 4 - 06-11-2021 - 16-20-07 - Measure and Integration Theory (20MAT22C2)Document90 pages4 - 06-11-2021 - 16-20-07 - Measure and Integration Theory (20MAT22C2)Tapan Kumar PatraNo ratings yet
- Lecture Topic 4Document60 pagesLecture Topic 4dhadkanNo ratings yet
- Random Variables: Define A Random Variable Find The Possible Values of A Random VariableDocument20 pagesRandom Variables: Define A Random Variable Find The Possible Values of A Random VariableFemia Closa FortusNo ratings yet
- Conditional Distributions and Stochastic IndependenceDocument2 pagesConditional Distributions and Stochastic IndependenceAlthea AbabaNo ratings yet
- Probability DistributionsDocument59 pagesProbability DistributionsAkibZ ARTNo ratings yet
- Computing The Variance of A Discrete Probability DistributionDocument14 pagesComputing The Variance of A Discrete Probability DistributioninamowtoNo ratings yet
- Beyond Riemann With Volterra, Henstock, and Kurzweil: Mohammad Yasir Feroz KhanDocument13 pagesBeyond Riemann With Volterra, Henstock, and Kurzweil: Mohammad Yasir Feroz KhanValentin MotocNo ratings yet
- Chapter 04 - Random VariablesDocument54 pagesChapter 04 - Random VariablesBatu GünNo ratings yet
- Gaussian IdentitiesDocument1 pageGaussian IdentitiesBobNo ratings yet
- Advance StatsDocument17 pagesAdvance Statslucky2010No ratings yet
- Random VariablesDocument44 pagesRandom VariablesOtAkU 101No ratings yet
- Statistics and Peobability Lecture 1Document11 pagesStatistics and Peobability Lecture 1john christian de leonNo ratings yet
- Statistics ExamDocument1 pageStatistics ExamGom-o Eugenio Jr0% (1)
- Full Download Solutions Manual To Accompany Stochastic Calculus For Finance I 9780387249681 PDF Full ChapterDocument34 pagesFull Download Solutions Manual To Accompany Stochastic Calculus For Finance I 9780387249681 PDF Full Chapterbriber.soordus2a4j100% (16)
- Table Common DistributionsDocument3 pagesTable Common DistributionsAndrew GoodNo ratings yet
- Slides Prepared by John S. Loucks St. Edward's University: 1 Slide © 2003 Thomson/South-WesternDocument30 pagesSlides Prepared by John S. Loucks St. Edward's University: 1 Slide © 2003 Thomson/South-WesternHRish BhimberNo ratings yet
- PTSP Unit-IvDocument14 pagesPTSP Unit-IvNagendra Madhu DaraNo ratings yet
- Week 5 - Random Variables, CDF, PDFDocument16 pagesWeek 5 - Random Variables, CDF, PDFHaris GhafoorNo ratings yet
- Course Notes Stochastic Processes - AucklandDocument195 pagesCourse Notes Stochastic Processes - AucklandRR886No ratings yet
- STAT230 Course NotesDocument51 pagesSTAT230 Course NotesDrishti HandaNo ratings yet
- Tutorial 9 QNDocument2 pagesTutorial 9 QNanon_5970959290% (1)
- Lesson 1-2 PROBABILITY OF RANDOM VARIABLESDocument27 pagesLesson 1-2 PROBABILITY OF RANDOM VARIABLESCarbon CopyNo ratings yet
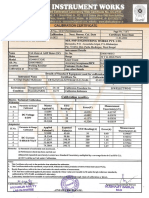
- 6rffi) : L/t4e Make Model No. Location atDocument2 pages6rffi) : L/t4e Make Model No. Location atBhriguram DasNo ratings yet
- Generating Random NumbersDocument23 pagesGenerating Random NumbersFarhan BayuNo ratings yet
- Chapter 4 StatisticsDocument25 pagesChapter 4 StatisticsFlora NguyễnNo ratings yet
- (Mathematics and Its Applications) Malempati M. Rao, Randall J. Swift - Probability Theory With Applications - Springer (2006)Document536 pages(Mathematics and Its Applications) Malempati M. Rao, Randall J. Swift - Probability Theory With Applications - Springer (2006)sergioandradNo ratings yet
- Lecture10-CHANGE OF MEASURE AND THE GIRSANOV THEOREM PDFDocument7 pagesLecture10-CHANGE OF MEASURE AND THE GIRSANOV THEOREM PDFVenkat NeelakantanNo ratings yet
- 5 Joint Probability Distribution.7245.1583725420.9784Document30 pages5 Joint Probability Distribution.7245.1583725420.9784Pun AditepNo ratings yet
- Department of Mathematics MTL 733 (Stochastics of Finance) Tutorial Sheet No. 1Document2 pagesDepartment of Mathematics MTL 733 (Stochastics of Finance) Tutorial Sheet No. 1JayantNo ratings yet