You might also like
- Proyecto - Ferrosilicio 75 - Final para Imprimir Con Pre TextualDocument320 pagesProyecto - Ferrosilicio 75 - Final para Imprimir Con Pre TextualGrecia Velazquez100% (1)
- Problemas Resueltos - Ecuaciones DiferencialesDocument5 pagesProblemas Resueltos - Ecuaciones DiferencialesYeraldin SotoNo ratings yet
- Primer Parcial de PROYECTO IMA (Alberto Renteria)Document4 pagesPrimer Parcial de PROYECTO IMA (Alberto Renteria)Alberto RsNo ratings yet
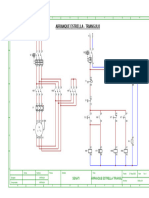
- Arranque Estrella Triángulo - CadDocument1 pageArranque Estrella Triángulo - CadYaqueli Mayta100% (1)
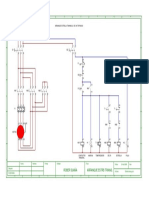
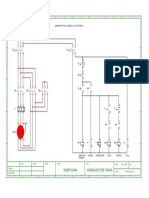
- Esq Fuerza TornoDocument1 pageEsq Fuerza TornoenmanuelNo ratings yet
- Practica 9Document10 pagesPractica 9anton salaNo ratings yet
- Reporte de Práctica 2 - PLCDocument7 pagesReporte de Práctica 2 - PLCOscarNo ratings yet
- Reporte de Práctica 3 - PLCDocument6 pagesReporte de Práctica 3 - PLCOscarNo ratings yet
- Reporte de Práctica 5 - PLCDocument8 pagesReporte de Práctica 5 - PLCOscarNo ratings yet
- Devanados Partidos o Part-WindingDocument1 pageDevanados Partidos o Part-WindingPedro PicapiedraNo ratings yet
- Estrella-Triangulo Por Eliminacion de Resistencias RotoricasDocument1 pageEstrella-Triangulo Por Eliminacion de Resistencias RotoricasPedro PicapiedraNo ratings yet
- Arranque DirectoDocument1 pageArranque DirectoLim LCVNo ratings yet
- (A A-) NDocument1 page(A A-) NJosué Rodas GonzálesNo ratings yet
- Esquema Monofasico 2Document1 pageEsquema Monofasico 2Roger ali Pérez SaraviaNo ratings yet
- Arranque Estrella Triángulo - Cad PDFDocument1 pageArranque Estrella Triángulo - Cad PDFraulNo ratings yet
- Símbolos Eléctricos 2Document7 pagesSímbolos Eléctricos 2Santiago GarciaNo ratings yet
- Inversor de Giro MonofásicoDocument1 pageInversor de Giro MonofásicoJuan CzNo ratings yet
- Estrella - TrianguloDocument1 pageEstrella - TrianguloPedro PicapiedraNo ratings yet
- Reporte de Práctica 1 - PLCDocument7 pagesReporte de Práctica 1 - PLCOscarNo ratings yet
- Arranque Estrella - TrianguloDocument1 pageArranque Estrella - Triangulostevensarteaga2004No ratings yet
- Arranque Directo Motores AcDocument2 pagesArranque Directo Motores AcLa PlagaNo ratings yet
- EsquemasDocument4 pagesEsquemasMaria planellerNo ratings yet
- Circuito Electro Neumático, Planificación.Document3 pagesCircuito Electro Neumático, Planificación.Josué Rodas GonzálesNo ratings yet
- Frenado Por Contra Corriente (CDocument1 pageFrenado Por Contra Corriente (CPedro PicapiedraNo ratings yet
- Arranque Directo Tres EstacionesDocument1 pageArranque Directo Tres EstacionesNicolas Arias100% (3)
- Avance Practica N°9 - Hinojosa CongonaDocument8 pagesAvance Practica N°9 - Hinojosa CongonaFernando HinojosaNo ratings yet
- Control A Dos y Tres HilosDocument1 pageControl A Dos y Tres HilosSaulo MárquezNo ratings yet
- ParcialDocument1 pageParcialJose Luis Mantilla AguilarNo ratings yet
- Fifo TemporizadoDocument1 pageFifo TemporizadoHector GonzalezNo ratings yet
- 15 - 1 Inversion Giro Motor SerieDocument2 pages15 - 1 Inversion Giro Motor Serieladislao10 cayetano estebanNo ratings yet
- F1 PDFDocument1 pageF1 PDFAxelNo ratings yet
- CadesimuDocument1 pageCadesimupaolamonzobNo ratings yet
- Actividad N°1Document1 pageActividad N°1Marco Schwenk AlarconNo ratings yet
- ElectrohidraulicaDocument29 pagesElectrohidraulicaBrayan Rojas0% (1)
- Practica 7 - T-ON TelemecaniqueDocument1 pagePractica 7 - T-ON Telemecaniqueadbkashd HACSBAKSBNo ratings yet
- 3 Conveyor Belt Sequence Run1 eDocument1 page3 Conveyor Belt Sequence Run1 eAhmed OsmanNo ratings yet
- 3 Conveyor Belt SequenceDocument1 page3 Conveyor Belt SequenceAhmed OsmanNo ratings yet
- Practica Basica de Control de Transferencia ElectricaDocument1 pagePractica Basica de Control de Transferencia ElectricaJonathan CardenasNo ratings yet
- DhalanderDocument1 pageDhalanderpaolamonzobNo ratings yet
- DanielCanet FT4.7 MandoDocument1 pageDanielCanet FT4.7 MandoDaniel Canet LopezNo ratings yet
- A1 PDFDocument1 pageA1 PDFAxelNo ratings yet
- A B C D E F G H: Infocal Arranque SecuencialDocument1 pageA B C D E F G H: Infocal Arranque SecuencialJhonny Huancollo100% (1)
- Arranque YD - AutoDocument1 pageArranque YD - AutoVictoria SimbañaNo ratings yet
- Arranque de Motores ElectricosDocument12 pagesArranque de Motores ElectricosSergio Suárez RiesgoNo ratings yet
- Hidraulica ProporcionalDocument8 pagesHidraulica ProporcionalBenigna Flores fernandezNo ratings yet
- Sistema de Transferencia Basico y ElementalDocument1 pageSistema de Transferencia Basico y ElementalJonathan CardenasNo ratings yet
- Inversion de Giro 38VDocument1 pageInversion de Giro 38VSaúl CaboNo ratings yet
- Trabajo en Clase GIDocument9 pagesTrabajo en Clase GIErik Thiago XavezNo ratings yet
- Tablero Bomba LucesDocument1 pageTablero Bomba Lucesluis werner peña ariasNo ratings yet
- Estrella-Triangulo ControlDocument1 pageEstrella-Triangulo ControlBryan Eduardo CandoNo ratings yet
- Motor Se Arranque Simultâneo CadsimuDocument1 pageMotor Se Arranque Simultâneo CadsimuLuther BuqueNo ratings yet
- Formato No.19Document1 pageFormato No.1925 Pedro Alejandro Mazariegos BámacaNo ratings yet
- Estrella TriánguloDocument1 pageEstrella TriánguloLiz Patricio ChambiNo ratings yet
- Diagrama Electrico - Arranque Directo de Dos MotoresDocument1 pageDiagrama Electrico - Arranque Directo de Dos MotoresDavid CamposNo ratings yet
- CADENA2Document1 pageCADENA2JESUS SALVADOR VILLEGAS GARCIANo ratings yet
- Arraque de Motor Iman Permanente y Giro Inverso DCDocument2 pagesArraque de Motor Iman Permanente y Giro Inverso DCjuan toapantaNo ratings yet
- Inversion de Giro - Cad PDFDocument1 pageInversion de Giro - Cad PDFAnonymous SegCAngVY5No ratings yet
- Alternancia BombasDocument1 pageAlternancia Bombaspacoferez2000No ratings yet
- Practica de Grupo de Movimientos 2 PDFDocument1 pagePractica de Grupo de Movimientos 2 PDFOSWALDO VILLEGAS MARTINEZNo ratings yet
- Tolva de Planta Carbonífera.Document2 pagesTolva de Planta Carbonífera.Juan Jose Palacios VillarrealNo ratings yet
- Arranque Estrella Triangulo PDFDocument1 pageArranque Estrella Triangulo PDFMarcelo ArtolaNo ratings yet
- Reporte de Práctica 4 - PLCDocument7 pagesReporte de Práctica 4 - PLCOscarNo ratings yet
- Reporte de Práctica 1 - PLCDocument7 pagesReporte de Práctica 1 - PLCOscarNo ratings yet
- Resistencia HidráulicaDocument4 pagesResistencia HidráulicaOscarNo ratings yet
- Circuitos Práctica de NodosDocument8 pagesCircuitos Práctica de NodosOscarNo ratings yet
- Practica Analisis de MallasDocument5 pagesPractica Analisis de MallasOscarNo ratings yet
- ENAEX - FT Blendex ALRDocument1 pageENAEX - FT Blendex ALRJaime Andres Silva EstayNo ratings yet
- Turbina de GasDocument13 pagesTurbina de GasPwnsoNo ratings yet
- Suelo Cemento INFORMEDocument6 pagesSuelo Cemento INFORMEHumbertoEchalarNo ratings yet
- 1 Cuales Son Los Procesos Industriales de Producción de Fertilizantes y Conozca Una de Las Más Importantes Aplicaciones Del Ácido SulfúricoDocument3 pages1 Cuales Son Los Procesos Industriales de Producción de Fertilizantes y Conozca Una de Las Más Importantes Aplicaciones Del Ácido SulfúricoCiberjjuniorNo ratings yet
- Mud CleanerDocument11 pagesMud CleanerCristian ErickNo ratings yet
- T835Document285 pagesT835Airton AntonioNo ratings yet
- Analisis Temperatura Motor DCDocument3 pagesAnalisis Temperatura Motor DC_ssantiago_No ratings yet
- Definición de EntalpiaDocument7 pagesDefinición de EntalpiaHEyarEKNo ratings yet
- Peligro Mecanico - OdpDocument24 pagesPeligro Mecanico - OdpElied Salas Agudelo100% (1)
- PrecargaDocument47 pagesPrecargaJavier AbadNo ratings yet
- Practica de Laboratorio N - 03 Fisica Iii Fic 2017Document14 pagesPractica de Laboratorio N - 03 Fisica Iii Fic 2017Haggy Quiñones100% (1)
- Prácticas de Lab. (Biología I) PDFDocument51 pagesPrácticas de Lab. (Biología I) PDFJosue CruzNo ratings yet
- Transmisiones MecanicasDocument26 pagesTransmisiones Mecanicasalvaroazuaje100% (3)
- 80 Atz M.T Proyecto de Investigacion 10Document45 pages80 Atz M.T Proyecto de Investigacion 10yanethNo ratings yet
- El Significado de La Teoría General de Los SistemasDocument39 pagesEl Significado de La Teoría General de Los Sistemaslucas107No ratings yet
- 1 Muestreo de Suelos e Interpretacion de Resultados de LaboratorioDocument12 pages1 Muestreo de Suelos e Interpretacion de Resultados de LaboratorioPaolita Zubieta BelloNo ratings yet
- Lista Verif Medios ClimaticosDocument17 pagesLista Verif Medios ClimaticosOsirisRodrigzNo ratings yet
- Tipos de CementoDocument4 pagesTipos de CementoEdwin RiofrioNo ratings yet
- Suelo y Calidad de Cafe PDFDocument11 pagesSuelo y Calidad de Cafe PDFKevin UsecheNo ratings yet
- Manual Diseño Construcción y Montaje de Tanques Estacionarios de Techo Conico Segun API 650Document671 pagesManual Diseño Construcción y Montaje de Tanques Estacionarios de Techo Conico Segun API 650stiglatNo ratings yet
- Optometria en MexicoDocument56 pagesOptometria en MexicoEFRAIN GAMBOANo ratings yet
- Equipos ExtraccionDocument3 pagesEquipos ExtraccionLety JimenezNo ratings yet
- Datos y AzarDocument6 pagesDatos y Azarsharina97No ratings yet
- Nuevas Tendencias Del ConcretoDocument6 pagesNuevas Tendencias Del ConcretodielmanNo ratings yet
- SESION 6 - Cierre y EstabilizaciónDocument18 pagesSESION 6 - Cierre y EstabilizaciónruthNo ratings yet
- Concentradores JigsDocument32 pagesConcentradores JigsDaniel HuamaniNo ratings yet