You might also like
- Amasadora Dic 23Document29 pagesAmasadora Dic 23Manuel Blanco MendozaNo ratings yet
- EnglerDocument13 pagesEngleredwinNo ratings yet
- Proyecto PLCS Industria Azucarera Santa ElenaDocument69 pagesProyecto PLCS Industria Azucarera Santa ElenaRoland RangelNo ratings yet
- Estabilidad Térmica de Los Sistemas HidráulicosDocument2 pagesEstabilidad Térmica de Los Sistemas HidráulicosEstuardo CalderònNo ratings yet
- Torno RevolverDocument13 pagesTorno Revolver_borboamolina100% (1)
- Revision y Actualizacion Practicas Operativas y MantenimientoDocument89 pagesRevision y Actualizacion Practicas Operativas y MantenimientoDjj Ramirez100% (1)
- Uso de Fibras Vegetales en La Edificacion SostenibleDocument22 pagesUso de Fibras Vegetales en La Edificacion SosteniblefreddyNo ratings yet
- A Continuación Se Muestra Un Diagrama Esquemático de Un Ciclo Por Refrigeración Por Compresión deDocument8 pagesA Continuación Se Muestra Un Diagrama Esquemático de Un Ciclo Por Refrigeración Por Compresión dejsk789No ratings yet
- Maquina RebanadoraDocument23 pagesMaquina RebanadoraJose Ignacio NinaNo ratings yet
- Imprimir Proyecto GaytanDocument48 pagesImprimir Proyecto Gaytanmilton roberto peñate alvaroNo ratings yet
- Dotacion de Agua - para TruchasDocument6 pagesDotacion de Agua - para TruchasAnt LLiuyaNo ratings yet
- Principios de Corte de Metales y MaquinabilidadDocument40 pagesPrincipios de Corte de Metales y MaquinabilidadAñazco DavidNo ratings yet
- FORJADO - MonografiaDocument16 pagesFORJADO - MonografiaDelia Araoz Quiroz0% (1)
- Adquisición de MaquinariaDocument25 pagesAdquisición de MaquinariaVanesa DelgadoNo ratings yet
- Como Determinar La Capacidad de Un Silo Cilíndrico y de BunkerDocument9 pagesComo Determinar La Capacidad de Un Silo Cilíndrico y de BunkerFabian Martinez100% (1)
- Apsd - Apsd-515 - Formatoalumnotrabajofinal Hidraulica GabrielDocument13 pagesApsd - Apsd-515 - Formatoalumnotrabajofinal Hidraulica GabrielPool Curimania100% (1)
- Sistema Control Caldera VaporDocument10 pagesSistema Control Caldera VaporJuan Alexis Jerez SanhuezaNo ratings yet
- Alicates FichaDocument9 pagesAlicates FichaAlberto J Salcedo MNo ratings yet
- Clase 4 Auxiliatura Mec 3333Document17 pagesClase 4 Auxiliatura Mec 3333Fabrii Magnus LodbrókNo ratings yet
- Final Mec 335Document5 pagesFinal Mec 335Alfredo FitaNo ratings yet
- Mezclador de Cinta Horizontal de Acero InoxidableDocument3 pagesMezclador de Cinta Horizontal de Acero InoxidableLuis Carlos Luciano Córdova RebazaNo ratings yet
- Funcionamiento Del Sistema de RefrigeraciónDocument7 pagesFuncionamiento Del Sistema de RefrigeraciónrojasjosNo ratings yet
- PM Compresor Portatil IR 185Document2 pagesPM Compresor Portatil IR 185Guillermo ValeraNo ratings yet
- Procedimientos para Tallar Engranajes Por Medio de FresadoDocument3 pagesProcedimientos para Tallar Engranajes Por Medio de FresadoCarlos DerasNo ratings yet
- Bitacora # 1Document3 pagesBitacora # 1Laura Maria Carranza CabraNo ratings yet
- Sistemas de de Arranque de Los Motores TrifasicosDocument10 pagesSistemas de de Arranque de Los Motores TrifasicosKelynd Astete VerdeNo ratings yet
- Ejercicios de Operaciones y Procesos UnitariosDocument6 pagesEjercicios de Operaciones y Procesos UnitariosEstudiante INGNo ratings yet
- 3EP Cuñas y PasadoresDocument8 pages3EP Cuñas y PasadoresOmar Hernandez JuarezNo ratings yet
- Tornillo Sin Fin y CoronaDocument4 pagesTornillo Sin Fin y CoronaCristhian Ustariz SalgueroNo ratings yet
- 4 - Taller de Diseño Caja ReductoraDocument69 pages4 - Taller de Diseño Caja ReductorajohanNo ratings yet
- Huerga - Diseño y Cálculo de Un Reductor de Velocidad Con Relación de Transmisión 12 y Par Máximo...Document164 pagesHuerga - Diseño y Cálculo de Un Reductor de Velocidad Con Relación de Transmisión 12 y Par Máximo...Denis CamachoNo ratings yet
- Obtención de Bajas TemperaturasDocument3 pagesObtención de Bajas TemperaturasLéo AyolNo ratings yet
- Memo Adc 2016-IDocument34 pagesMemo Adc 2016-IVictor Miguel Alcazar FlorNo ratings yet
- Proyecto de Grado FinalDocument26 pagesProyecto de Grado FinalDiego Alejandro Mercado QuintanillaNo ratings yet
- Trapiche Electrico para CañaDocument2 pagesTrapiche Electrico para CañaAntonio Martin Asto SanchezNo ratings yet
- Problemas 2 - Unidad IIDocument20 pagesProblemas 2 - Unidad IIBryan PJNo ratings yet
- Informe Proyecto Torno CNCDocument186 pagesInforme Proyecto Torno CNCifjtoledo100% (1)
- Actividad 2 - MantenimientoDocument3 pagesActividad 2 - MantenimientoRodrigoNo ratings yet
- Proyecto de Mantenimiento Empresa de Transporte Libertad SADocument61 pagesProyecto de Mantenimiento Empresa de Transporte Libertad SAAvila Castillo EmersonNo ratings yet
- Elementos de Transmision de PotenciaDocument8 pagesElementos de Transmision de PotenciaFrancoNo ratings yet
- Formato Evaluacion Socio Ambiental Preliminar (Fotmato 12 - Anexo 3-A) (Autoguardado)Document7 pagesFormato Evaluacion Socio Ambiental Preliminar (Fotmato 12 - Anexo 3-A) (Autoguardado)matehoNo ratings yet
- Manual de Instrucciones para TornoDocument13 pagesManual de Instrucciones para TornoMiguel Angel Vargas AchuNo ratings yet
- Fresadora - EngranajeDocument13 pagesFresadora - EngranajeJorge Humberto Flores AvilaNo ratings yet
- Analisis Fuerzas EngranesDocument17 pagesAnalisis Fuerzas EngranesDanperdomo100% (1)
- Informe de Practicas Miriam 3Document34 pagesInforme de Practicas Miriam 3Julio Tirado100% (1)
- Abonadora Manual Un DiscoDocument10 pagesAbonadora Manual Un DiscoJose Manuel Martínez SuárezNo ratings yet
- Bombas y Motores Hidrostaticos para Mineria Capitulo deDocument16 pagesBombas y Motores Hidrostaticos para Mineria Capitulo demardelidNo ratings yet
- Efinol ® PT - FilesDocument103 pagesEfinol ® PT - FilesGrismar Corina AriasNo ratings yet
- Informe Motores de Combustion InternaDocument15 pagesInforme Motores de Combustion InternaJorg GuaquipanaNo ratings yet
- Proyecto Adjuntado (Autoguardado)Document96 pagesProyecto Adjuntado (Autoguardado)Krlos Cely100% (2)
- Diseño y Montaje de Un Sistema Eléctrico de Banda Transportadora Automática de Envasado de Un ProductoDocument11 pagesDiseño y Montaje de Un Sistema Eléctrico de Banda Transportadora Automática de Envasado de Un ProductoJhon fredis Sanchez alberniaNo ratings yet
- Cursoanalitico CilindroDocument2 pagesCursoanalitico CilindroArlene Ochoa100% (1)
- Recti Fica DoDocument21 pagesRecti Fica DoAngel DavidNo ratings yet
- Trabajo Mecanismos de Transmisión Del MovimientoDocument25 pagesTrabajo Mecanismos de Transmisión Del MovimientoyoanferNo ratings yet
- Guía Elementos de MaquinasDocument34 pagesGuía Elementos de MaquinasAnonymous gEeZc15peQNo ratings yet
- Transmision de MovimientoDocument11 pagesTransmision de MovimientoCarlos MejiaNo ratings yet
- Mecanismos TIDocument47 pagesMecanismos TIdominguezliarteaNo ratings yet
- Mecanismos TransmisionDocument9 pagesMecanismos TransmisionSusana Merinero PérezNo ratings yet
- Capitulo Vii TransmisionesDocument21 pagesCapitulo Vii TransmisionesAdri AguilarNo ratings yet
- Apuntes InternetDocument16 pagesApuntes InternetSIDDHARTA DÍAZNo ratings yet
- Prueba de Relacion de TransformacionDocument5 pagesPrueba de Relacion de TransformacionDavid MiseNo ratings yet
- Voltimetro, Amperimetro.Document11 pagesVoltimetro, Amperimetro.BraChavNo ratings yet
- Comandos ATN'SDocument2 pagesComandos ATN'SYulian Arlex Granda Pérez100% (1)
- LabMEII Preparatorio7 GR1ADocument8 pagesLabMEII Preparatorio7 GR1ACamilo QuintoNo ratings yet
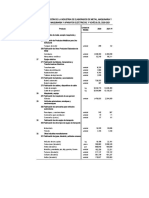
- 16.12 Producción de La Industria de Elaborados de Metal, Maquinaria Y Equipo, Maquinaria Y Aparatos Eléctricos, Y Vehículos, 2020-2021Document2 pages16.12 Producción de La Industria de Elaborados de Metal, Maquinaria Y Equipo, Maquinaria Y Aparatos Eléctricos, Y Vehículos, 2020-2021Sharon NatividadNo ratings yet
- Exámen Final - 2021-II (ML 140)Document2 pagesExámen Final - 2021-II (ML 140)Angel Steven Belleza MartínezNo ratings yet
- EjerciciosDEM Unidad 3-4Document3 pagesEjerciciosDEM Unidad 3-4Cristopher MedinaNo ratings yet
- Historia de Las Maquinas HerramientasDocument3 pagesHistoria de Las Maquinas HerramientasJavier PosadaNo ratings yet
- Todos Los Códigos de Electricidad en Estados UnidosDocument22 pagesTodos Los Códigos de Electricidad en Estados Unidosmusiadorno 2023100% (1)
- 3 ES-PT-103-FV - Escaleras Dielétricas Extensión 3C PDFDocument1 page3 ES-PT-103-FV - Escaleras Dielétricas Extensión 3C PDFJhon Jairo ValenciaNo ratings yet
- Tecnología 09 Guía 3 Placa BaseDocument7 pagesTecnología 09 Guía 3 Placa BaseSEBASTIAN VALDES VALERONo ratings yet
- 04 Ii - EeDocument40 pages04 Ii - EeJAVIER SIESQUENNo ratings yet
- NVR 47xxmanualDocument30 pagesNVR 47xxmanualJulian ZaderNo ratings yet
- SEMANA 2 - Ejercicio de Ordenación de RegistrosDocument21 pagesSEMANA 2 - Ejercicio de Ordenación de RegistrosJuan JBNo ratings yet
- Bascula 11Document96 pagesBascula 11nicolas angeles100% (1)
- Uso I2C Pantalla LCD16x2Document11 pagesUso I2C Pantalla LCD16x2Rommel LoayzaNo ratings yet
- Formato IEEEDocument3 pagesFormato IEEEJuanjo ReyesNo ratings yet
- Fabricando Una Ganzúa Con Un Disco Duro EspDocument5 pagesFabricando Una Ganzúa Con Un Disco Duro EspangelNo ratings yet
- Blaubox Ehome Data SheetDocument2 pagesBlaubox Ehome Data SheetAlba Car MarNo ratings yet
- Informe 05 Circuitos ElectronicosDocument12 pagesInforme 05 Circuitos ElectronicosFernando HinojosaNo ratings yet
- TP 5Document10 pagesTP 5Nacho NotaNo ratings yet
- Motoperimetro 04158 - 4162 - 4164m03 Cubre CarterDocument2 pagesMotoperimetro 04158 - 4162 - 4164m03 Cubre CarterJyanNo ratings yet
- Gree TosotDocument1 pageGree Tosotdeniseglz.airetecNo ratings yet
- Despiece 0445020056Document3 pagesDespiece 0445020056Andy Anderson Limachi PeraltaNo ratings yet
- Generaciones de Las ComputadorasDocument10 pagesGeneraciones de Las ComputadorasJesusDavidLosanoSierraNo ratings yet
- ServotransmisiónesDocument9 pagesServotransmisiónesChuy DelgadoNo ratings yet
- Compuerta Mural 1Document14 pagesCompuerta Mural 1toni_82_7556No ratings yet
- ACT3 MPA 3arDocument10 pagesACT3 MPA 3arAnghel FariasNo ratings yet
- Terceros y Repuestos KRCP 2014Document349 pagesTerceros y Repuestos KRCP 2014TECSUPHYONo ratings yet
- Modelo Plan de Mantenimiento BásicoDocument11 pagesModelo Plan de Mantenimiento BásicoCarlos Andres NavarroNo ratings yet