You might also like
- Introduction History ArchitectureDocument37 pagesIntroduction History Architecturetazeb AbebeNo ratings yet
- Homebrewing Guide Acknowledges ContributorsDocument3 pagesHomebrewing Guide Acknowledges Contributorstazeb AbebeNo ratings yet
- 07 - Chapter-7 Sight DistanceDocument5 pages07 - Chapter-7 Sight Distancetazeb AbebeNo ratings yet
- Application - PortalDocument6 pagesApplication - Portaltazeb AbebeNo ratings yet
- Chapter 1-1Document31 pagesChapter 1-1tazeb AbebeNo ratings yet
- CH 1 Up 9 Probability Note (For Engineering) - 1Document93 pagesCH 1 Up 9 Probability Note (For Engineering) - 1tazeb AbebeNo ratings yet
- Geometric Design Manual With Appendices Final - Chapter 1-4Document65 pagesGeometric Design Manual With Appendices Final - Chapter 1-4tazeb AbebeNo ratings yet
- Assigment Ip Addresses - Siti Nordiyana Binti RodiDocument36 pagesAssigment Ip Addresses - Siti Nordiyana Binti RodiNur DiyanaNo ratings yet
- Application - PortalDocument5 pagesApplication - Portaltazeb AbebeNo ratings yet
- Geometric Design Manual With Appendices Final - Chapter 1-4Document65 pagesGeometric Design Manual With Appendices Final - Chapter 1-4tazeb AbebeNo ratings yet
- HTML Basics Day1Document18 pagesHTML Basics Day1SHEVA007No ratings yet
- Application - Portal PDFDocument6 pagesApplication - Portal PDFtazeb AbebeNo ratings yet
- Electronic - 1st 7 8 PDFDocument22 pagesElectronic - 1st 7 8 PDFtazeb AbebeNo ratings yet
- Chapter 1-1Document31 pagesChapter 1-1tazeb AbebeNo ratings yet
- Worked Example PDFDocument82 pagesWorked Example PDFtazeb Abebe100% (1)
- Introduction to Fundamentals of Engineering Materials ChapterDocument47 pagesIntroduction to Fundamentals of Engineering Materials Chaptertazeb AbebeNo ratings yet
- CH 6Document15 pagesCH 6tazeb AbebeNo ratings yet
- Chap 1 (Introduction)Document59 pagesChap 1 (Introduction)tazeb AbebeNo ratings yet
- Pile Foundation DesignDocument82 pagesPile Foundation Designcuongnguyen89% (28)
- Fundamentals of Computers Chapter 1 SummaryDocument32 pagesFundamentals of Computers Chapter 1 Summarytazeb AbebeNo ratings yet
- Etc Bme-1Document38 pagesEtc Bme-1tazeb AbebeNo ratings yet
- Presentation 1Document1 pagePresentation 1tazeb AbebeNo ratings yet
- CH 5Document32 pagesCH 5tazeb AbebeNo ratings yet
- What Is PiezoelectricityDocument7 pagesWhat Is Piezoelectricitytazeb AbebeNo ratings yet
- Build Operate TransferDocument4 pagesBuild Operate Transfertazeb AbebeNo ratings yet
- Exponential Worksheet SolutionDocument5 pagesExponential Worksheet SolutionLeo SindolNo ratings yet
- Piezoelectric sensor technology explainedDocument7 pagesPiezoelectric sensor technology explainedtazeb AbebeNo ratings yet
- Chapter 5 NewDocument48 pagesChapter 5 Newtazeb AbebeNo ratings yet
- 10 Exponential Worksheet SolutionDocument47 pages10 Exponential Worksheet Solutiontazeb AbebeNo ratings yet
- Chapter2 SMDocument412 pagesChapter2 SMtazeb AbebeNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Static Characteristics of a Pressure Control System ExperimentDocument10 pagesStatic Characteristics of a Pressure Control System ExperimentMohammed IhsanNo ratings yet
- AgentInstallGuide enDocument56 pagesAgentInstallGuide enshikhanirankariNo ratings yet
- The Use of Silicone Materials in Close Proximity PDFDocument4 pagesThe Use of Silicone Materials in Close Proximity PDFLBNo ratings yet
- RAK811 Lora Module Datasheet V1.3Document14 pagesRAK811 Lora Module Datasheet V1.3Tonny-Leonard FarauanuNo ratings yet
- Heavy Vehicle Dynamics Comparison Between Leaf Spring HydropneumaticDocument7 pagesHeavy Vehicle Dynamics Comparison Between Leaf Spring HydropneumaticRajaSekarsajjaNo ratings yet
- IRLB4132PbF International RectifierDocument9 pagesIRLB4132PbF International RectifierJORGENo ratings yet
- Vertex VT26 MANUAL QIS - VT20V6Document19 pagesVertex VT26 MANUAL QIS - VT20V6JanmejoyPatraNo ratings yet
- Introduction to TechnopreneurshipDocument33 pagesIntroduction to TechnopreneurshipMohd Faiz Ash Burn100% (1)
- UltraFlo FDB Failure AnalysisDocument23 pagesUltraFlo FDB Failure AnalysisJam Samson RugaNo ratings yet
- Curriculum of Bachelor in Industrial EngineeringDocument138 pagesCurriculum of Bachelor in Industrial EngineeringPratikshya DevkotaNo ratings yet
- Watts User Guide TD Central Unit Wifi 2019 09 Ttl2Document240 pagesWatts User Guide TD Central Unit Wifi 2019 09 Ttl2Francesco PansaNo ratings yet
- Astrology KannadaDocument1 pageAstrology KannadaAditya SinghNo ratings yet
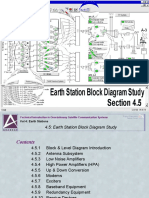
- Earth Station Block Diagram Study: Section 5Document213 pagesEarth Station Block Diagram Study: Section 5Extreme DaysNo ratings yet
- RMC Rev EDocument330 pagesRMC Rev EAtminNo ratings yet
- Under The Guidance Of: TH THDocument59 pagesUnder The Guidance Of: TH THSuresh Kumar PNo ratings yet
- Manual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Document242 pagesManual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Nhật Tân Nguyễn VănNo ratings yet
- Laboratory Tutorial#1 Mcs Practicals Ms150Document20 pagesLaboratory Tutorial#1 Mcs Practicals Ms150JOSENo ratings yet
- SP5050S - Manual - 200508 SIPDocument62 pagesSP5050S - Manual - 200508 SIPchino71No ratings yet
- Conect OresDocument172 pagesConect OresJuan Diego García LópezNo ratings yet
- 74HC08Document7 pages74HC08Brian DoyleNo ratings yet
- Vacuum Tube - WikipediaDocument33 pagesVacuum Tube - WikipediaHenslsdkgaANo ratings yet
- Quiz LetDocument5 pagesQuiz LetFarihah FazimNo ratings yet
- A Transportable Neural-Network Approach To Autonomous Vehicle FollowingDocument9 pagesA Transportable Neural-Network Approach To Autonomous Vehicle FollowingAhmet İlker ŞinNo ratings yet
- Shared Memory ArchitectureDocument39 pagesShared Memory Architectureอภิเษก หงษ์วิทยากรNo ratings yet
- PWD22 ManualDocument125 pagesPWD22 ManualMahmoud Hatem IbrahemNo ratings yet
- Girbau HS4022 40 55 & 4110 TILTDocument6 pagesGirbau HS4022 40 55 & 4110 TILTValdir AzevedoNo ratings yet
- IOT Based Automatic Vehicle Accident Alert System: October 2020Document5 pagesIOT Based Automatic Vehicle Accident Alert System: October 2020NISHANTH SNo ratings yet
- YEW UP35A ManualDocument404 pagesYEW UP35A ManualJhonatan BuenoNo ratings yet
- How Your Radio Receives Music SignalsDocument2 pagesHow Your Radio Receives Music SignalsAlexPemaNo ratings yet
- Navigating with VOR: Understanding VHF Omnidirectional Range SystemsDocument3 pagesNavigating with VOR: Understanding VHF Omnidirectional Range SystemsFahmi PrayogiNo ratings yet