You might also like
- Weak Power R. Chedid, Member, IEEE Karaki, Member, Ieee ChemaliDocument1 pageWeak Power R. Chedid, Member, IEEE Karaki, Member, Ieee Chemaliabdeldjabbar14No ratings yet
- Hybrid Wind-Diesel Powered System DC Link Stability Analysis Taking Into Account Load DisturbancesDocument6 pagesHybrid Wind-Diesel Powered System DC Link Stability Analysis Taking Into Account Load Disturbancesabdeldjabbar14No ratings yet
- An Overview of Alternative Type-Reduction Approaches For Reducing The Computational Cost of Interval Type-2 Fuzzy Logic ControllersDocument8 pagesAn Overview of Alternative Type-Reduction Approaches For Reducing The Computational Cost of Interval Type-2 Fuzzy Logic Controllersabdeldjabbar14No ratings yet
- Information Sciences: M. Zarinbal, M.H. Fazel Zarandi, I.B. TurksenDocument24 pagesInformation Sciences: M. Zarinbal, M.H. Fazel Zarandi, I.B. Turksenabdeldjabbar14No ratings yet
- 1 s2.0 S1568494614001823 MainDocument10 pages1 s2.0 S1568494614001823 Mainabdeldjabbar14No ratings yet
- Fuzzy Type-1 and Type-2 TSK Modeling With Application To Solar Power PredictionDocument6 pagesFuzzy Type-1 and Type-2 TSK Modeling With Application To Solar Power Predictionabdeldjabbar14No ratings yet
- Information Sciences: Gerardo M. Méndez, Maria de Los Angeles HernándezDocument21 pagesInformation Sciences: Gerardo M. Méndez, Maria de Los Angeles Hernándezabdeldjabbar14No ratings yet
- These V BregeaultDocument141 pagesThese V Bregeaultabdeldjabbar14No ratings yet
- ISA Transactions: Mohammad El-Bardini, Ahmad M. El-NagarDocument12 pagesISA Transactions: Mohammad El-Bardini, Ahmad M. El-Nagarabdeldjabbar14No ratings yet
- 1 s2.0 S0307904X14002054 Main PDFDocument16 pages1 s2.0 S0307904X14002054 Main PDFabdeldjabbar14No ratings yet
- Rotor Position Sensor Fault Detection Isolation and Reconfiguration of A Doubly Fed Induction Machine ControlDocument10 pagesRotor Position Sensor Fault Detection Isolation and Reconfiguration of A Doubly Fed Induction Machine Controlabdeldjabbar14No ratings yet
- Simulation Modelling Practice and Theory: Georgios Tsengenes, Thomas Nathenas, Georgios AdamidisDocument14 pagesSimulation Modelling Practice and Theory: Georgios Tsengenes, Thomas Nathenas, Georgios Adamidisabdeldjabbar14No ratings yet
- Comments On " - Plane Representation For Type-2 Fuzzy Sets: Theory and Applications"Document2 pagesComments On " - Plane Representation For Type-2 Fuzzy Sets: Theory and Applications"abdeldjabbar14No ratings yet
- Applied Mathematical Modelling: Zhe Sun, Ning Wang, Yunrui BiDocument16 pagesApplied Mathematical Modelling: Zhe Sun, Ning Wang, Yunrui Biabdeldjabbar14No ratings yet
- DFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain ObserverDocument8 pagesDFIG-Based Wind Turbine Robust Control Using High-Order Sliding Modes and A High Gain Observerabdeldjabbar14No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TP of AutomobileDocument20 pagesTP of AutomobileHicham Salahdine100% (1)
- AdrenaLinn Sync User GuideDocument1 pageAdrenaLinn Sync User GuidesNo ratings yet
- NOXON Iradio Manual GBDocument60 pagesNOXON Iradio Manual GBfrogaitoNo ratings yet
- Robox User Manual RBX 1Document120 pagesRobox User Manual RBX 1JoezifNo ratings yet
- University of Engineering and Technology: Power Supply and BreadboardDocument7 pagesUniversity of Engineering and Technology: Power Supply and BreadboardEtsham Amjad100% (1)
- 002 UMG507 Manual English PDFDocument48 pages002 UMG507 Manual English PDFAhmadNo ratings yet
- PC2000-8 Spec SheetDocument20 pagesPC2000-8 Spec SheetNeeraj ChauhanNo ratings yet
- Temperature Controls K57 Series: Features and BenefitsDocument2 pagesTemperature Controls K57 Series: Features and BenefitsmaresliviuNo ratings yet
- MT Mil-Gov Freq ListDocument23 pagesMT Mil-Gov Freq ListmanfromgladNo ratings yet
- 9186 2014 Nissan Leaf Service RepairDocument259 pages9186 2014 Nissan Leaf Service RepairEngr Ko Victor100% (2)
- Chemical Technicians 10-2021Document30 pagesChemical Technicians 10-2021PRC BaguioNo ratings yet
- 01B-ElectSchematics Feb2015Document19 pages01B-ElectSchematics Feb2015Alive100% (2)
- Reviewer 1Document2 pagesReviewer 1Jhonlee Nicolas ReyesNo ratings yet
- 2011 - Indian DatabaseDocument33 pages2011 - Indian DatabaseGhanta SinghNo ratings yet
- An0046 Efm32 Usb Hardware Design GuidelinesDocument21 pagesAn0046 Efm32 Usb Hardware Design GuidelinesMohammad HBNo ratings yet
- BrosurDocument68 pagesBrosurKiki Xhui7No ratings yet
- Lastexception 63715991441Document1,051 pagesLastexception 63715991441Hannah KimNo ratings yet
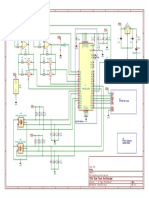
- Title: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenDocument1 pageTitle: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenAbdelkader Mechernene100% (2)
- MFL Compendium 002Document59 pagesMFL Compendium 002kingston67% (3)
- K To 12 ICT - Computer Systems Servicing (NC II) Curriculum Guide May 2016 LO - Learning Outcome ofDocument2 pagesK To 12 ICT - Computer Systems Servicing (NC II) Curriculum Guide May 2016 LO - Learning Outcome ofFroz WorksNo ratings yet
- Chapter 4 Flip Flop-ROBIAHDocument50 pagesChapter 4 Flip Flop-ROBIAHIqmal Shah Putra50% (2)
- Mit Lab 01Document6 pagesMit Lab 01api-247714257No ratings yet
- 74LS145Document6 pages74LS145Deepesh MishraNo ratings yet
- A - ATG - PR 2014 0006 GB - HyPower Geko OCT - BR - K1 02 2015 - 150dpi PDFDocument16 pagesA - ATG - PR 2014 0006 GB - HyPower Geko OCT - BR - K1 02 2015 - 150dpi PDFionutenacheNo ratings yet
- Voltage Monitoring Series SM 501Document5 pagesVoltage Monitoring Series SM 501srinivasgateNo ratings yet
- Products Links E-Mail: High Voltage Filter CapacitorsDocument3 pagesProducts Links E-Mail: High Voltage Filter CapacitorsAkmalNo ratings yet
- Introduction To Semiconductor ModuleDocument42 pagesIntroduction To Semiconductor ModuleR Y100% (1)
- Murphy Asm 160 Manual PDFDocument4 pagesMurphy Asm 160 Manual PDFJorge Luis Cucunuba RoyeroNo ratings yet
- Uniconn Operation Manual Addendum Subject: Operation of Phoenix Select Gauge With Uniconn Firmware: 1.200R1 Wellview Version 2.400R1Document11 pagesUniconn Operation Manual Addendum Subject: Operation of Phoenix Select Gauge With Uniconn Firmware: 1.200R1 Wellview Version 2.400R1ahmed elsheikhNo ratings yet