You might also like
- Etica ProfesionalDocument16 pagesEtica ProfesionalGiancarlo Miguel Corbacho MoralesNo ratings yet
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaFrom EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaNo ratings yet
- Diseño de muros de contenciónDocument56 pagesDiseño de muros de contenciónMichael Junior100% (5)
- Casos Del Deseño de Placas Base para Columnas y Placas de Soporte para VigasDocument26 pagesCasos Del Deseño de Placas Base para Columnas y Placas de Soporte para VigasIrving RangelNo ratings yet
- Manual de Albañilería: Las Instalaciones Sanitarias de La CasaDocument56 pagesManual de Albañilería: Las Instalaciones Sanitarias de La CasaASPEmPERU94% (142)
- Diseno en Concreto Armado - MoralesDocument333 pagesDiseno en Concreto Armado - MoralesAbel Carazas Covinos100% (21)
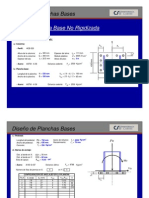
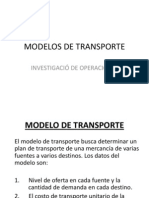
- Diseño de Conexiones - Placa BaseDocument13 pagesDiseño de Conexiones - Placa BaseArturo Alvarez100% (3)
- Cimentacion para Una Maquina Reciprocante Grupo ElectrogenoDocument36 pagesCimentacion para Una Maquina Reciprocante Grupo ElectrogenoTolyKuperHuisaFernandez50% (2)
- Columna base datosDocument8 pagesColumna base datosErnesto Carrera0% (2)
- Fundacion BombaDocument7 pagesFundacion Bombajosem_rojascNo ratings yet
- B1 - T3 - Teoria de Diseño de Bases de Equipos Vibratorios PDFDocument47 pagesB1 - T3 - Teoria de Diseño de Bases de Equipos Vibratorios PDFgiovanni100% (2)
- Cimentacion y Vibración de Máquinas 02-06-2022Document49 pagesCimentacion y Vibración de Máquinas 02-06-2022Jeffer Alexander Arbildo Balrodano100% (1)
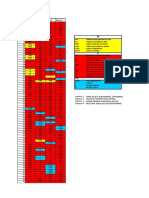
- Modelos de Transporte-1Document24 pagesModelos de Transporte-1Joseph Sarath40% (5)
- Diseño de Bases para Equipo DinamicoDocument4 pagesDiseño de Bases para Equipo DinamicoJamill Jhosua Linares TejedaNo ratings yet
- Ingeniería de detalle para la reubicación de sistemas de amoníaco dentro de la Planta XDocument38 pagesIngeniería de detalle para la reubicación de sistemas de amoníaco dentro de la Planta XFredy Conejo100% (1)
- Diseño de Fundaciones y Bases de EquiposDocument45 pagesDiseño de Fundaciones y Bases de EquiposNestor Sanchez100% (1)
- Ica Diseño de TanquesDocument281 pagesIca Diseño de Tanqueshijito00798% (40)
- Practica n2 Pureza CianuroDocument9 pagesPractica n2 Pureza CianuroEdson HurtadoNo ratings yet
- ACPC-2da Clase-Cimentaciones de Equipos VibratoriosDocument62 pagesACPC-2da Clase-Cimentaciones de Equipos VibratoriosPedro FloresNo ratings yet
- Cimentaciones para equipo dinámico: análisis y diseñoDocument17 pagesCimentaciones para equipo dinámico: análisis y diseñoUALU333100% (1)
- 05-1.1-Cimentaciones de Maquinas 2008Document68 pages05-1.1-Cimentaciones de Maquinas 2008Lautaro Macia100% (1)
- Guia Santillana 6 Profesor PDF Aprendizaje Plan de EstudiosDocument1 pageGuia Santillana 6 Profesor PDF Aprendizaje Plan de Estudioselizabeth rodriguez chavarria0% (1)
- Diseño Viga CarrileraDocument8 pagesDiseño Viga CarrileraDaniel Alexander Lagos Trenfo100% (1)
- Actividad 0Document9 pagesActividad 0Diego MontoyaNo ratings yet
- Ejemplo 2 de Carta de BalanceDocument7 pagesEjemplo 2 de Carta de Balancedaniel quiñonesNo ratings yet
- Estudio de Hidrología, Hidráulica y Socavación PDFDocument201 pagesEstudio de Hidrología, Hidráulica y Socavación PDFJhon Antony Omonte Vargas100% (1)
- Cimentaciones de Máquinas DinámicasDocument17 pagesCimentaciones de Máquinas Dinámicaslaura100% (1)
- Calculo de Cimentacion de MaquinasDocument25 pagesCalculo de Cimentacion de MaquinasGerbercp Condori Palacios100% (1)
- Cimentacion de MaquinasDocument11 pagesCimentacion de Maquinasluisjo202100% (4)
- Cimentaciones Sujetas A VibraciónDocument34 pagesCimentaciones Sujetas A VibraciónRoberto Inchauste50% (2)
- Cimentaciones de MaquinasDocument42 pagesCimentaciones de MaquinasDiego Lazo75% (4)
- Ejemplo Pernos de Anclaje LRFDDocument10 pagesEjemplo Pernos de Anclaje LRFDRichard Perry100% (3)
- Volantes de InerciaDocument52 pagesVolantes de Inerciapablotorresbozzo2686100% (4)
- Construcción de anillos de cimentación para tanques de almacenamientoDocument96 pagesConstrucción de anillos de cimentación para tanques de almacenamientoAlejandro Vasquez100% (5)
- Cimentaciones para MáquinasDocument16 pagesCimentaciones para Máquinasrodrigo100% (2)
- Resumen Cinematica y EquilibradoDocument16 pagesResumen Cinematica y EquilibradomaxiNo ratings yet
- Calculo RedlerDocument39 pagesCalculo RedlerHORACIO SERENELLINo ratings yet
- Obras de Arte - HidraulicaDocument60 pagesObras de Arte - Hidraulicacatg25108889% (18)
- Riesgos LaboralesDocument20 pagesRiesgos LaboraleslorenaNo ratings yet
- Progsfx7400 PDFDocument47 pagesProgsfx7400 PDFAndres Andrezito75% (4)
- Procedimiento Rescate Montacargas T5-CRDocument19 pagesProcedimiento Rescate Montacargas T5-CRluis carvajalNo ratings yet
- PDVSA-FCR-18Document15 pagesPDVSA-FCR-18Lisbeth FernandezNo ratings yet
- Guía Cuaderno ObraDocument30 pagesGuía Cuaderno ObraHans Pilco100% (8)
- Tesis - Cimentaciones de Maquinaria SAPDocument183 pagesTesis - Cimentaciones de Maquinaria SAPRoke Salinas100% (2)
- Listado Consultores Vigentes: Fecha de ActualizaciónDocument165 pagesListado Consultores Vigentes: Fecha de ActualizaciónAnonymous QhE5UBNo ratings yet
- Anclaje MaquinariaDocument11 pagesAnclaje MaquinariaCésar Vázquez ValcárcelNo ratings yet
- Parámetros de Diseño de Cimentación de Maquinarias PDFDocument71 pagesParámetros de Diseño de Cimentación de Maquinarias PDFLuis Marcos100% (1)
- Volante de InerciaDocument6 pagesVolante de InerciaJesus SerranoNo ratings yet
- Diseno de Placa Base y Pernos de AnclajeDocument14 pagesDiseno de Placa Base y Pernos de AnclajeCecil Guevara33% (3)
- Consideraciones de Diseño de Cimentaciones Tipo Pórtico para Equipos Dinámicos 2014Document25 pagesConsideraciones de Diseño de Cimentaciones Tipo Pórtico para Equipos Dinámicos 2014Juan Carlos Gutiérrez Sánchez0% (1)
- CálculoCimentaciónBombasDocument12 pagesCálculoCimentaciónBombasINGEJIMENEZNo ratings yet
- T8 - Diseño de La Cimentacion Tanque de AlmacenamientoDocument34 pagesT8 - Diseño de La Cimentacion Tanque de AlmacenamientommjamrNo ratings yet
- Cimentación de Máquinas VibrantesDocument11 pagesCimentación de Máquinas VibrantesMANUELCHATENo ratings yet
- Cap3.1 Tipos de Presa RevanchasDocument61 pagesCap3.1 Tipos de Presa Revanchasdensy jose alejosNo ratings yet
- Cimentaciones Sujetas A VibracionDocument34 pagesCimentaciones Sujetas A VibracionAngel Hidalgo ZuloagaNo ratings yet
- Diseño de Cimentaciones en Un Entorno DinamicoDocument7 pagesDiseño de Cimentaciones en Un Entorno DinamicoYahir Villanueva100% (1)
- Aci 351-3R-04 RTDocument51 pagesAci 351-3R-04 RTDavid100% (1)
- Cimentaciones para MaquinariaDocument41 pagesCimentaciones para MaquinariaCristian SuchíNo ratings yet
- MemoriasDocument14 pagesMemoriasDieggo100% (5)
- Pdvsa 90615.1.002Document15 pagesPdvsa 90615.1.002Giovanni B. S.No ratings yet
- Cap 6 Volantes - RPMDocument54 pagesCap 6 Volantes - RPMAlfredo Choque PereyraNo ratings yet
- Unidad 6Document20 pagesUnidad 6Joan Maximiliano SegoviaNo ratings yet
- Me 1 Capitulo 1Document23 pagesMe 1 Capitulo 1Manuel Paulin100% (1)
- Cuestionario TurbomaquinasDocument10 pagesCuestionario TurbomaquinasCarlos Lara B.No ratings yet
- POTENCIA Y PAR DE LOS MOTOR DE TRACTORES AGRÍCOLASDocument24 pagesPOTENCIA Y PAR DE LOS MOTOR DE TRACTORES AGRÍCOLASHenry Campomanes ChávezNo ratings yet
- Bombas rotodinámicas: Semejanza, velocidad específica y selección de rpm y motorDocument19 pagesBombas rotodinámicas: Semejanza, velocidad específica y selección de rpm y motorDariel GomezNo ratings yet
- 01 - Clase Especificación de Motores Eléctricos RE01Document37 pages01 - Clase Especificación de Motores Eléctricos RE01Diego CristaldoNo ratings yet
- Balanceo Dinámico IndustrialDocument5 pagesBalanceo Dinámico IndustrialGisela Paulina Vargas RoaNo ratings yet
- Guia U1Document3 pagesGuia U1javierNo ratings yet
- Volante de InerciaDocument6 pagesVolante de InerciaBryanyMariaNo ratings yet
- Analisis Vibracional de Una ChancadoraDocument0 pagesAnalisis Vibracional de Una ChancadoraArturo RojasNo ratings yet
- Consulta Frenos y Embragues Pilco6924Document23 pagesConsulta Frenos y Embragues Pilco6924Marko PilcoNo ratings yet
- Diseño de mecanismos de manivela-correderaDocument35 pagesDiseño de mecanismos de manivela-correderaManuel de Jes�s Bustamante SilvasNo ratings yet
- Motores de InducciónDocument10 pagesMotores de InducciónYscarlys MartinezNo ratings yet
- calculo-redlerDocument39 pagescalculo-redleruriel napoliNo ratings yet
- Volante de inercia para máquinasDocument7 pagesVolante de inercia para máquinasRicardo MartinezNo ratings yet
- Lab 6 de Conversión2Document16 pagesLab 6 de Conversión2Alejandro FigueroaNo ratings yet
- Plan para La Vigilancia RN 448Document22 pagesPlan para La Vigilancia RN 448Giancarlo Miguel Corbacho MoralesNo ratings yet
- Formula Rio CanalesDocument1 pageFormula Rio CanalesJames GamboaNo ratings yet
- Curso Completo Hidrología EAP Civil 2 PDFDocument33 pagesCurso Completo Hidrología EAP Civil 2 PDFGustavo CarrionNo ratings yet
- 07-Estudio de Suelos PDFDocument41 pages07-Estudio de Suelos PDFJorge RodriguezNo ratings yet
- Cimentaciones SuperficialesDocument57 pagesCimentaciones SuperficialesJuan Marcos Cuellar SerrateNo ratings yet
- Sesion 12 - Curvas - Verticales PDFDocument14 pagesSesion 12 - Curvas - Verticales PDFRoberto C Zambrano NarroNo ratings yet
- Cálculos Hidrológicos e Hidráulicos - Máximo Villón BéjarDocument72 pagesCálculos Hidrológicos e Hidráulicos - Máximo Villón BéjarJonathan Coba BonNo ratings yet
- Análisis Estático Capi 1, Primera Clase PDFDocument83 pagesAnálisis Estático Capi 1, Primera Clase PDFGiancarlo Miguel Corbacho MoralesNo ratings yet
- Curvas VerticalesDocument29 pagesCurvas VerticalesGiancarlo Miguel Corbacho MoralesNo ratings yet
- Clase 06 - Método Pendiente-DeflexiónDocument16 pagesClase 06 - Método Pendiente-DeflexiónMauricio Leonardo SandovalNo ratings yet
- Taller Lean DesignDocument2 pagesTaller Lean DesignMichael HackNo ratings yet
- Análisis y diseño estructural mixto ETABS SAFEDocument26 pagesAnálisis y diseño estructural mixto ETABS SAFEemetioNo ratings yet
- Dinamica de Los PapelesDocument28 pagesDinamica de Los PapelesEsc LeguimNo ratings yet
- Trabajo N°02 Alañileria ConfinadaDocument22 pagesTrabajo N°02 Alañileria ConfinadaMarco Flores ZuñigaNo ratings yet
- Análisis Estático Aisladores Tercera ClaseDocument70 pagesAnálisis Estático Aisladores Tercera ClaseGiancarlo Miguel Corbacho MoralesNo ratings yet
- Trabajo Nº03 Edificio Multifamiliar 10 Niveles PDFDocument5 pagesTrabajo Nº03 Edificio Multifamiliar 10 Niveles PDFGiancarlo Miguel Corbacho MoralesNo ratings yet
- Taller 2 Dinamica Papeles 2014-Formato para 8 MinutosDocument2 pagesTaller 2 Dinamica Papeles 2014-Formato para 8 MinutosNoemi Milagros Yucra VargasNo ratings yet
- Programa Amadeus66Document2 pagesPrograma Amadeus66JavoDeejayNo ratings yet
- JR CahuideDocument20 pagesJR CahuideRolando Moises Castillo MamaniNo ratings yet
- Fuelle Del SolDocument4 pagesFuelle Del SolcosmeNo ratings yet
- Conceptos Básicos de Economia EmpresarialDocument10 pagesConceptos Básicos de Economia EmpresarialMayra MoralesNo ratings yet
- XN2PRDocument3 pagesXN2PRYoul SilvaNo ratings yet
- Actividad 1Document14 pagesActividad 1andrees rdalcof¡No ratings yet
- Calcula DoraDocument4 pagesCalcula DoraAntonioNo ratings yet
- Semana 2 Laboratorio de Innovación - TaggedDocument38 pagesSemana 2 Laboratorio de Innovación - TaggedYandi AlmaNo ratings yet
- Análisis de las construcciones identitarias en una entrevista sobre el caso de eutanasia de Ana EstradaDocument13 pagesAnálisis de las construcciones identitarias en una entrevista sobre el caso de eutanasia de Ana EstradaJeferson HerreraNo ratings yet
- Tema 1 ParainfoDocument3 pagesTema 1 Parainfocito23No ratings yet
- La Ventana de Trabajo de PublisherDocument13 pagesLa Ventana de Trabajo de PublisherANGELA GABRIELA RECALDE CALDERONNo ratings yet
- Presentacion Pensamiento PositivoDocument17 pagesPresentacion Pensamiento PositivoVeronica CastroNo ratings yet
- Programación Orientada A ObjetosDocument137 pagesProgramación Orientada A ObjetospolouserNo ratings yet
- Planificación de Juego TrabajoDocument5 pagesPlanificación de Juego TrabajoNaty LuasesNo ratings yet
- Unidades RecopiladasDocument529 pagesUnidades RecopiladasmiguelNo ratings yet
- Narrativa Del Plan 25 Cuarto Grado B y C 2024Document1 pageNarrativa Del Plan 25 Cuarto Grado B y C 2024GABRIELA ECHENIQUENo ratings yet
- Exportacion de Fibra de Vicuña A EE - UUDocument33 pagesExportacion de Fibra de Vicuña A EE - UUAngelica Alave100% (1)
- El Tallo-1Document38 pagesEl Tallo-1CARLOS DUHANEL DERAS GUZMANNo ratings yet
- Socialismo Del Siglo XXIDocument1 pageSocialismo Del Siglo XXIVictor ValenciaNo ratings yet
- Acta FInal Noveno Grado 2022Document2 pagesActa FInal Noveno Grado 2022centrodeeducacionngbethelNo ratings yet
- La Corrupcion Desde La Mente de Un JovenDocument17 pagesLa Corrupcion Desde La Mente de Un JovenPeruaneitorNo ratings yet
- U2 Comunicaciones Alambricas y Por Fibra OpticaDocument59 pagesU2 Comunicaciones Alambricas y Por Fibra OpticaEZER LUNA POTENCIANONo ratings yet
- Observaciones Segundo GradoDocument2 pagesObservaciones Segundo GradoBlanca Ines Cruz SebastianNo ratings yet