You might also like
- CHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myDocument65 pagesCHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myhakita86No ratings yet
- Internal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)Document9 pagesInternal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)jimi7No ratings yet
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduDocument4 pagesRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsNo ratings yet
- Robuste Hinf 1Document5 pagesRobuste Hinf 1Mihai SuciuNo ratings yet
- Advanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsDocument5 pagesAdvanced Proportional-Integral-Derivative Tuning For Integrating and Unstable Processes With Gain and Phase Margin SpecificationsSidhant SharanNo ratings yet
- Generation of Theoretical or Experimental Models of The Various Components of The SystemDocument17 pagesGeneration of Theoretical or Experimental Models of The Various Components of The SystemCupa no DensetsuNo ratings yet
- Feed Forward Cascade ControlDocument10 pagesFeed Forward Cascade ControlMiNiTexasNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument20 pagesElec Eng 4Cl4:: Control System DesignरजतयदुवंशीNo ratings yet
- Frequency Response: S A S UDocument25 pagesFrequency Response: S A S UAbhinav AjmaniNo ratings yet
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocument53 pagesControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNo ratings yet
- Attitude Control of A QuadrotorDocument6 pagesAttitude Control of A QuadrotorGhada BeydounNo ratings yet
- Periodic Disturbance Rejection: Part II - Pole-Placement ControlDocument7 pagesPeriodic Disturbance Rejection: Part II - Pole-Placement ControlAbdo AliNo ratings yet
- Ei6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Document7 pagesEi6801 - Computer Control of Process Part-A Answer All Questions (5x2 10)Anonymous yO7rcec6vuNo ratings yet
- Interaction in Two-Variable Control Distillation Columns - IDocument14 pagesInteraction in Two-Variable Control Distillation Columns - IVardhan KaushikNo ratings yet
- Multivariable Control For MIMO ProcessesDocument14 pagesMultivariable Control For MIMO ProcessesJuanNo ratings yet
- CH 6Document12 pagesCH 6aprilswapnilNo ratings yet
- Design of Anti-Windup-Extensions For Digital Control LoopsDocument6 pagesDesign of Anti-Windup-Extensions For Digital Control Loopsfrank_grimesNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument12 pagesElec Eng 4Cl4:: Control System DesignMorteza SepehranNo ratings yet
- Discussion 6 2016Document1 pageDiscussion 6 2016Rama KrishnaNo ratings yet
- Robuste Hinf 2Document7 pagesRobuste Hinf 2Mihai SuciuNo ratings yet
- Chapter 14Document25 pagesChapter 14●●●●●●●1No ratings yet
- Centralized PID Control by Decoupling of A Boiler-Turbine UnitDocument6 pagesCentralized PID Control by Decoupling of A Boiler-Turbine Unitrehan_sadiq1991No ratings yet
- A PID Decoupling Controller Based On DRNNDocument4 pagesA PID Decoupling Controller Based On DRNNIJEC_EditorNo ratings yet
- Funciones de TransferenciaDocument69 pagesFunciones de TransferenciaAlejandro SanvicenteNo ratings yet
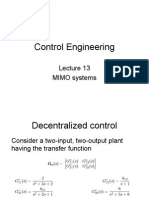
- Control Engineering: MIMO SystemsDocument26 pagesControl Engineering: MIMO SystemsPisicuta LaviniaNo ratings yet
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocument53 pagesControl System Design Based On Frequency Response Analysis: Closed-Loop BehaviorCelsoMonNo ratings yet
- And HZ Robust Design Techniques For Static Prefilters: Alvaro@iie. Edu - Uy - FaxDocument6 pagesAnd HZ Robust Design Techniques For Static Prefilters: Alvaro@iie. Edu - Uy - FaxDya IonutNo ratings yet
- Robust Control: Steven - Ding@uni-Due - de Robust Control (V-WS 09/10)Document14 pagesRobust Control: Steven - Ding@uni-Due - de Robust Control (V-WS 09/10)anh_em5503No ratings yet
- Problema Metal RezolvataDocument10 pagesProblema Metal RezolvataImi BalogNo ratings yet
- Optimal Sizing and Sitting of Distributed Generation Using Particle Swarm Optimization Guided Genetic AlgorithmDocument12 pagesOptimal Sizing and Sitting of Distributed Generation Using Particle Swarm Optimization Guided Genetic AlgorithmGolam ZakariaNo ratings yet
- Self-Tuning of Fuzzy Logic Controllers in Cascade LoopsDocument8 pagesSelf-Tuning of Fuzzy Logic Controllers in Cascade LoopsCarlos BellatinNo ratings yet
- Processcontrol Topic13 PidtuningDocument15 pagesProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Optimal Setting For Discrete PID Controllers: Ar+f+lDocument10 pagesOptimal Setting For Discrete PID Controllers: Ar+f+lingjojedaNo ratings yet
- Mass and Energy Analysis of Control VolumesDocument6 pagesMass and Energy Analysis of Control Volumes張耀文No ratings yet
- t7 PDFDocument13 pagest7 PDFKj_bdNo ratings yet
- Rga PDFDocument84 pagesRga PDFSumiNo ratings yet
- Analysis of Autopilot System IntegratedDocument11 pagesAnalysis of Autopilot System Integratedrbbudino0410No ratings yet
- WHOLEDOMINATIONINGRAPHSDocument7 pagesWHOLEDOMINATIONINGRAPHSKarthikNo ratings yet
- Gain and Phase MarginsDocument5 pagesGain and Phase MarginsamitkallerNo ratings yet
- FY Eng PDFDocument36 pagesFY Eng PDFCarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Lecture38 PDFDocument5 pagesLecture38 PDFNiyas PNo ratings yet
- Controller Tuning: A Motivational ExampleDocument58 pagesController Tuning: A Motivational ExampleAnas OdehNo ratings yet
- The Blend Station A New Ratio Control StructureDocument6 pagesThe Blend Station A New Ratio Control StructureBOMBE45No ratings yet
- Simple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho ChoiDocument6 pagesSimple Fuzzy PID Controllers For DC-DC Converters: K.-W. Seo and Han Ho Choiankit407No ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument20 pagesElec Eng 4Cl4:: Control System DesignMorteza SepehranNo ratings yet
- Hooke Jeeves Method - 15Document11 pagesHooke Jeeves Method - 15Kelly SantosNo ratings yet
- Pid Controller Design and TuningDocument33 pagesPid Controller Design and TuningfaqihNo ratings yet
- G K S S: Che381 Process Dynamics & Control Jan-Apr 2014 End-Semester Exam 3 Hours 100 PointsDocument4 pagesG K S S: Che381 Process Dynamics & Control Jan-Apr 2014 End-Semester Exam 3 Hours 100 PointsSushmitaNo ratings yet
- Frequency ResponseDocument30 pagesFrequency ResponseGovind KumarNo ratings yet
- Esign For A: AbstractDocument5 pagesEsign For A: Abstractsattanic666No ratings yet
- Experimental Study of The GPC Applied To Separately Excited DC MotorDocument11 pagesExperimental Study of The GPC Applied To Separately Excited DC MotorIslo BenNo ratings yet
- Automatic Generation ControlDocument12 pagesAutomatic Generation ControlMohd MuzaniNo ratings yet
- PID Control System Analysis and DesignDocument10 pagesPID Control System Analysis and DesignSandro MoreroNo ratings yet
- Determination of Optimum Gear Ratios of A Two-StagDocument8 pagesDetermination of Optimum Gear Ratios of A Two-StagmohammedNo ratings yet
- Stability of Closed-Loop Control SystemsDocument19 pagesStability of Closed-Loop Control SystemsThrishnaa BalasupurManiamNo ratings yet
- PID Control System Analysis & DesignDocument10 pagesPID Control System Analysis & DesignFeridinand Thainis100% (1)
- Controller Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID ControllersDocument66 pagesController Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID Controllerssatya sagarNo ratings yet
- Experimentation, Validation, and Uncertainty Analysis for EngineersFrom EverandExperimentation, Validation, and Uncertainty Analysis for EngineersNo ratings yet
- Script To List The Values of A Profile Option at All LevelsDocument14 pagesScript To List The Values of A Profile Option at All LevelsPrabhu DevNo ratings yet
- ITN Module 1Document47 pagesITN Module 1Bryan YaranonNo ratings yet
- CS Investigatory ProjectDocument10 pagesCS Investigatory ProjectASHISH SableNo ratings yet
- Supervised LearningDocument4 pagesSupervised Learningpormen1983No ratings yet
- SOEN 6461-1-Intro - W2014Document91 pagesSOEN 6461-1-Intro - W2014vikramsaranganNo ratings yet
- User GuideDocument20 pagesUser GuideXisco LladóNo ratings yet
- Materi-IF401-M05-Illicit Data Access-Gnp2020-2021Document54 pagesMateri-IF401-M05-Illicit Data Access-Gnp2020-2021Julius AlfredoNo ratings yet
- YaraDocument15 pagesYaramngkpNo ratings yet
- Yozo LogDocument2 pagesYozo LogSarifaNo ratings yet
- S (3) : S E T: College of Engineering & TechnologyDocument3 pagesS (3) : S E T: College of Engineering & TechnologyMMhammed AlrowailyNo ratings yet
- CastGuard Blackhat 2022Document76 pagesCastGuard Blackhat 2022AkshayNo ratings yet
- Applied Physics LAb-1Document12 pagesApplied Physics LAb-1Shehbaz KhanNo ratings yet
- Lab 4: Search Data Structure: 1 Binary Tree - Binary Search TreeDocument5 pagesLab 4: Search Data Structure: 1 Binary Tree - Binary Search TreeDuc CaoNo ratings yet
- Aveva Pdms v12.0 Sp6.25 Full Software 2014 DownloadDocument1 pageAveva Pdms v12.0 Sp6.25 Full Software 2014 DownloadMegatoreNo ratings yet
- Thamarai Resume (Updated)Document5 pagesThamarai Resume (Updated)thamaraibala9788No ratings yet
- Keycloak Client Readthedocs Io en StableDocument16 pagesKeycloak Client Readthedocs Io en Stableyendrys blancoNo ratings yet
- Lab Manual 11Document4 pagesLab Manual 11Videos4u iKNo ratings yet
- Nvidia CudaDocument26 pagesNvidia CudaArpit VijayvergiaNo ratings yet
- USB-CAN User Manual (v7.20)Document12 pagesUSB-CAN User Manual (v7.20)Teerajet ChumrunworakiatNo ratings yet
- DatAshur PRO2 User Manual v2.5hlDocument121 pagesDatAshur PRO2 User Manual v2.5hljanezslovenacNo ratings yet
- University of Science and Technology of Southern PhilippinesDocument14 pagesUniversity of Science and Technology of Southern PhilippinesEric Jeffrey IINo ratings yet
- Deep Learning in C# - Coin Recognition in Keras - NET, Part I - CodeProjectDocument4 pagesDeep Learning in C# - Coin Recognition in Keras - NET, Part I - CodeProjectFahd AhmedNo ratings yet
- Week 1-2Document70 pagesWeek 1-2Ali AhmedNo ratings yet
- Usb Cam LogDocument3 pagesUsb Cam Logﹺ ﹺ ﹺ ﹺNo ratings yet
- SW1047A ManualDocument28 pagesSW1047A Manuallokoong11235No ratings yet
- LogDocument4 pagesLogNona WastiNo ratings yet
- FA DBMS Objective FINALDocument16 pagesFA DBMS Objective FINALPramod SrivastavaNo ratings yet
- LAB Manual 1-8Document111 pagesLAB Manual 1-8Eman KhanNo ratings yet
- Excel Keyboard Shortcuts For A PC v2Document1 pageExcel Keyboard Shortcuts For A PC v2ahmedmostafaibrahim22No ratings yet
- 1.1 Getting Started With HyperMesh Desktop - 2017 - UpdatedDocument10 pages1.1 Getting Started With HyperMesh Desktop - 2017 - UpdatedTusharNo ratings yet