You might also like
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Lecture 2-Rotating - Magnetic - FieldDocument42 pagesLecture 2-Rotating - Magnetic - FieldAmmar RamanNo ratings yet
- AC Machine Module 1Document19 pagesAC Machine Module 1Kim FetalverNo ratings yet
- Lecture 06 - AC Machinery FundamentalsDocument38 pagesLecture 06 - AC Machinery FundamentalsDicky Andra Irawan100% (1)
- Chapter 04 - AC Machinery FundamentalsDocument38 pagesChapter 04 - AC Machinery FundamentalsDedyBrianEricsonNainggolanNo ratings yet
- Lecture 06 - AC Machinery Fundamentals PDFDocument34 pagesLecture 06 - AC Machinery Fundamentals PDFMohammad A AlawneNo ratings yet
- Lecture 06 - AC Machinery FundamentalsDocument38 pagesLecture 06 - AC Machinery FundamentalsspiderhuntNo ratings yet
- B-H CurveDocument4 pagesB-H CurveSanchit MishraNo ratings yet
- Circuits-II SinusoidPhasors NewDocument48 pagesCircuits-II SinusoidPhasors NewAbby Orioque IINo ratings yet
- Electrical Engineering - Engineering - Basic Electrical Technology - Rotating Magnetic Field - NotesDocument11 pagesElectrical Engineering - Engineering - Basic Electrical Technology - Rotating Magnetic Field - NotescdkNo ratings yet
- Ac PDFDocument34 pagesAc PDFSunny ShaNo ratings yet
- Sakshi: AIEEE - 2003Document39 pagesSakshi: AIEEE - 2003Praveen Kumarpillai100% (1)
- PHYSICS CHAPTER5 - Cbse Board ProblemsDocument10 pagesPHYSICS CHAPTER5 - Cbse Board ProblemsBharath Kaushik SoundarrajanNo ratings yet
- 1 DataDocument12 pages1 Datayumna khanNo ratings yet
- Chapter 3elecDocument28 pagesChapter 3elecJibril JundiNo ratings yet
- Rec3 SolutionsDocument6 pagesRec3 SolutionsOscar Martinez0% (1)
- Design of ShaftDocument8 pagesDesign of ShaftPavan BabhaleNo ratings yet
- Induction Machine PrinciplesDocument4 pagesInduction Machine PrinciplesshahanbashaNo ratings yet
- Lect14 194197Document28 pagesLect14 194197Kusiima JophanNo ratings yet
- StressDocument25 pagesStressHoac Chu KenNo ratings yet
- Grav Radiation ProjectDocument21 pagesGrav Radiation ProjectmossmanjNo ratings yet
- Exp 6: Earth's Magnetic Field and Magnetic Field of A SolenoidDocument10 pagesExp 6: Earth's Magnetic Field and Magnetic Field of A SolenoidMariaNo ratings yet
- EMS Module 4-1 and 4-2Document9 pagesEMS Module 4-1 and 4-2Shiza ShakeelNo ratings yet
- Ch26 SSMDocument22 pagesCh26 SSMFranko UrciaNo ratings yet
- Campo Magnetico en Un ConductorDocument7 pagesCampo Magnetico en Un ConductorPEREDA UTRILLA MANUEL ALEXANDERNo ratings yet
- Heat of Fusion of Water - FormDocument6 pagesHeat of Fusion of Water - FormBeatriz IzquierdoNo ratings yet
- Capitulo 26 TiplerDocument22 pagesCapitulo 26 TiplerHamzaAouidatNo ratings yet
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- Damped Simple Harmonic Motion - Critical DampingDocument13 pagesDamped Simple Harmonic Motion - Critical DampingRohan MohataNo ratings yet
- Chapter 09Document16 pagesChapter 09서승찬88% (8)
- Physics For Scientists and Engineers Foundations and Connections Volume 2 1St Edition Katz Solutions Manual Full Chapter PDFDocument51 pagesPhysics For Scientists and Engineers Foundations and Connections Volume 2 1St Edition Katz Solutions Manual Full Chapter PDFBrendaTaylorwzab100% (9)
- Em 2Document1 pageEm 2kath kathNo ratings yet
- Physics - Ch-05 Q & ADocument18 pagesPhysics - Ch-05 Q & AGK addsNo ratings yet
- Dynamics Equation of Motion - Curvilinear Motion ProblemsDocument21 pagesDynamics Equation of Motion - Curvilinear Motion ProblemsDiana VegaNo ratings yet
- Classical Mechanics (Part 1 of PHYS214) - 2021 Homework Problem Set #1Document4 pagesClassical Mechanics (Part 1 of PHYS214) - 2021 Homework Problem Set #1Khensani MakhubeleNo ratings yet
- Physics of WAVES Tutorial 1Document5 pagesPhysics of WAVES Tutorial 1Rohan Ghosh DastidarNo ratings yet
- Unit 3 Quiz Solutions (100 Points)Document5 pagesUnit 3 Quiz Solutions (100 Points)Ray WongNo ratings yet
- Chapter 1: Fundamentals of Rotating Ac MachinesDocument5 pagesChapter 1: Fundamentals of Rotating Ac MachinesJules KouamNo ratings yet
- Pendulum Lab Report 1Document6 pagesPendulum Lab Report 1joe zouNo ratings yet
- Course 2Document24 pagesCourse 2A HNo ratings yet
- Physics For Scientists and Engineers Foundations and Connections Advance Edition Volume 2 1St Edition Katz Solutions Manual Full Chapter PDFDocument55 pagesPhysics For Scientists and Engineers Foundations and Connections Advance Edition Volume 2 1St Edition Katz Solutions Manual Full Chapter PDFBrendaTaylorwzab100% (7)
- Physics 213-Problem Set 10-Solutions Fall 1997: 1. Reading AssignmentDocument4 pagesPhysics 213-Problem Set 10-Solutions Fall 1997: 1. Reading AssignmentNicolás KozakNo ratings yet
- Field-angle dependence of thermal transport in Kitaev-Γ modelDocument4 pagesField-angle dependence of thermal transport in Kitaev-Γ modelのすをNo ratings yet
- Problem Set 10: Two-Dimensional Rotational and Translational Motion SolutionsDocument11 pagesProblem Set 10: Two-Dimensional Rotational and Translational Motion SolutionsanitaNo ratings yet
- 3.11 Mechanics of Materials F01 Exam #2 Solutions: Friday 11/08/01Document9 pages3.11 Mechanics of Materials F01 Exam #2 Solutions: Friday 11/08/01Shafiqullah GowharyNo ratings yet
- ECE331 Wi06 Hw8 Sol (Assignment 4)Document4 pagesECE331 Wi06 Hw8 Sol (Assignment 4)ABCNo ratings yet
- 2 - Chapter 1Document11 pages2 - Chapter 1AhmedNo ratings yet
- 31B Compton EffectDocument4 pages31B Compton Effectdevakash20606No ratings yet
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringDocument13 pagesSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringJeff HardyNo ratings yet
- Sinusoids & PhasorDocument28 pagesSinusoids & PhasorBryan YaranonNo ratings yet
- Lecture 6 - Electrical Circuits 2Document12 pagesLecture 6 - Electrical Circuits 2Shahrier NahinNo ratings yet
- Lecture03 P1Document24 pagesLecture03 P1Vy BuiNo ratings yet
- CH20 Induced Voltages and InductanceSolutionsSerway - 7th - EditionDocument26 pagesCH20 Induced Voltages and InductanceSolutionsSerway - 7th - EditionMichael Ricardo Espinoza SevillaNo ratings yet
- 2010 H2 Physics Paper 3 Soln - Updated For StudentsDocument8 pages2010 H2 Physics Paper 3 Soln - Updated For Studentslaslover100% (1)
- Xii Physics - Chapter 5 Term IDocument24 pagesXii Physics - Chapter 5 Term IRahulNo ratings yet
- EEEE3202-lecture 1Document7 pagesEEEE3202-lecture 1Jules KouamNo ratings yet
- Assignment 2Document3 pagesAssignment 2saurabhsryadavNo ratings yet
- Magnetism & MatterDocument17 pagesMagnetism & Matterkartiksingh46648No ratings yet
- Sifat Magnet Bahan02BDocument32 pagesSifat Magnet Bahan02BSyarif KotoNo ratings yet
- Jacobi AnDocument32 pagesJacobi Anعلي كامل الاسديNo ratings yet
- Askelandphulenotes Ch19printableDocument54 pagesAskelandphulenotes Ch19printablendue78No ratings yet
- Bahan Kul Siskom (3,4,5)Document84 pagesBahan Kul Siskom (3,4,5)Syarif KotoNo ratings yet
- Layer1osi 15agust2011Document31 pagesLayer1osi 15agust2011Syarif KotoNo ratings yet
- Bahan Kul Siskom (3,4,5)Document84 pagesBahan Kul Siskom (3,4,5)Syarif KotoNo ratings yet
- The Magician Game Script C++Document31 pagesThe Magician Game Script C++Syarif KotoNo ratings yet
- EL3014 Mikrokontroler AVRDocument40 pagesEL3014 Mikrokontroler AVRSyarif KotoNo ratings yet
- Ste M3Document39 pagesSte M3Syarif KotoNo ratings yet
- 2 Address DecoderDocument18 pages2 Address DecoderSyarif Koto0% (1)
- General Requirements For HV Hybrid SwitchgearDocument16 pagesGeneral Requirements For HV Hybrid SwitchgearSyarif KotoNo ratings yet
- Power Plant EngineeringDocument54 pagesPower Plant EngineeringSyarif KotoNo ratings yet
- I ThermDocument4 pagesI ThermAvneet MaanNo ratings yet
- AGB200Document6 pagesAGB200FadFad100% (2)
- Power Systems Guides Book by CL Wadhwa PDFDocument3 pagesPower Systems Guides Book by CL Wadhwa PDFAnkit Kumar0% (4)
- LM555 and LM556 Timer CircuitsDocument69 pagesLM555 and LM556 Timer CircuitskatambarogersNo ratings yet
- Chapter 6 Logic FamiliesDocument49 pagesChapter 6 Logic FamiliesRajan PaulNo ratings yet
- Green Paper Vol-1 (V 2 January 12, 2015)Document37 pagesGreen Paper Vol-1 (V 2 January 12, 2015)humane28No ratings yet
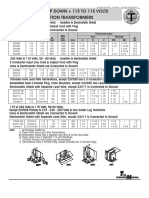
- Thordarson 23V367 Isolation TransformerDocument1 pageThordarson 23V367 Isolation TransformerdonsterthemonsterNo ratings yet
- Class Test - 2016: Electrical EngineeringDocument6 pagesClass Test - 2016: Electrical EngineeringarunNo ratings yet
- Especificación Fluke 1550bDocument3 pagesEspecificación Fluke 1550bAngel Morell OrtizNo ratings yet
- Diagramas Electricos e Hidraulicos J2.00-3.00XM E1.50-2.20XMSDocument33 pagesDiagramas Electricos e Hidraulicos J2.00-3.00XM E1.50-2.20XMSArmando OrtaNo ratings yet
- Circuit Breaker RatingsDocument75 pagesCircuit Breaker Ratingsyibelta abebeNo ratings yet
- Ford ApcmDocument4 pagesFord ApcmRichard Manas0% (1)
- Engine Electrical SystemDocument79 pagesEngine Electrical SystemCristian MirandaNo ratings yet
- Exercise 2Document3 pagesExercise 2Diogo Gonçalves OliveiraNo ratings yet
- Log-А8 ПІСЛЯ ОЧИСТКИ-WAUZZZ4E13N000455-293860km-182596miDocument21 pagesLog-А8 ПІСЛЯ ОЧИСТКИ-WAUZZZ4E13N000455-293860km-182596miSvargNo ratings yet
- Optimal Design of A Thermoelectric Cooling - Heating System For Car PDFDocument118 pagesOptimal Design of A Thermoelectric Cooling - Heating System For Car PDFYuva RajNo ratings yet
- Unit 4 Basic Electronics: StructureDocument23 pagesUnit 4 Basic Electronics: StructureParminder singh parmarNo ratings yet
- 111 - 2. 2025 MVA 13233 KV Power TFDocument32 pages111 - 2. 2025 MVA 13233 KV Power TFGanesh KumarNo ratings yet
- What Is The Difference Between A Circuit Board and A Bread BoardDocument12 pagesWhat Is The Difference Between A Circuit Board and A Bread BoardjackNo ratings yet
- Approval Sheet: Customer ManufacturerDocument7 pagesApproval Sheet: Customer ManufacturerypadillaNo ratings yet
- Keb F5 Frekventen RegulatorDocument378 pagesKeb F5 Frekventen RegulatorDaceDropNo ratings yet
- Test 1 Skee1013 20172018 - 1Document5 pagesTest 1 Skee1013 20172018 - 1Andy QklNo ratings yet
- S95160 - LCD ModuleDocument21 pagesS95160 - LCD Moduleantonio vukeNo ratings yet
- E-02-Final A3Document1 pageE-02-Final A3kitnaNo ratings yet
- Ro-Tap E Manual 2005Document10 pagesRo-Tap E Manual 2005M Suheri HidayatNo ratings yet
- AMC1602AI2CDocument21 pagesAMC1602AI2CArmand PopaNo ratings yet
- Midi Industrial Relay Type RMI. 2-10 10A MonostableDocument3 pagesMidi Industrial Relay Type RMI. 2-10 10A MonostableSergey LukinNo ratings yet
- FSAM75SM60A Motion SPM 2 Series: Features General DescriptionDocument16 pagesFSAM75SM60A Motion SPM 2 Series: Features General Descriptionมนต์ชัย บุญธนลาภNo ratings yet
- Smac Pro30Document38 pagesSmac Pro30FLORIN STOICANo ratings yet