You might also like
- Master Thesis (Ming Li) PDFDocument145 pagesMaster Thesis (Ming Li) PDFMarcNo ratings yet
- Brochure GFixFlotF VOL 2 Copy 2Document45 pagesBrochure GFixFlotF VOL 2 Copy 2MarcNo ratings yet
- Ellipse Series - Quick Start GuideDocument4 pagesEllipse Series - Quick Start GuideMarcNo ratings yet
- Brochure GFixFlotF VOL 2 Copy 2Document45 pagesBrochure GFixFlotF VOL 2 Copy 2MarcNo ratings yet
- Gexol PDFDocument36 pagesGexol PDFJNo ratings yet
- 2010 OMAE Straked Riser Design With VIVA PDFDocument12 pages2010 OMAE Straked Riser Design With VIVA PDFMarcNo ratings yet
- User Guide For SHEAR7 Version 4.10aDocument130 pagesUser Guide For SHEAR7 Version 4.10aMarcNo ratings yet
- Applsci 10 00905 v2 PDFDocument18 pagesApplsci 10 00905 v2 PDFMarcNo ratings yet
- OMAE2017-61768 VIV RESPONSES OF RISER WITH BUOYANCY ELEMENTS (Final) PDFDocument10 pagesOMAE2017-61768 VIV RESPONSES OF RISER WITH BUOYANCY ELEMENTS (Final) PDFMarcNo ratings yet
- OMAE2017-61768 VIV RESPONSES OF RISER WITH BUOYANCY ELEMENTS (Final) PDFDocument10 pagesOMAE2017-61768 VIV RESPONSES OF RISER WITH BUOYANCY ELEMENTS (Final) PDFMarcNo ratings yet
- Dissertation (Eileen - 16117) PDFDocument68 pagesDissertation (Eileen - 16117) PDFMarcNo ratings yet
- Applsci 10 00905 v2 PDFDocument18 pagesApplsci 10 00905 v2 PDFMarcNo ratings yet
- Master Thesis (Ming Li) PDFDocument145 pagesMaster Thesis (Ming Li) PDFMarcNo ratings yet
- User Guide For SHEAR7 Version 4.10aDocument130 pagesUser Guide For SHEAR7 Version 4.10aMarcNo ratings yet
- 2010 OMAE Straked Riser Design With VIVA PDFDocument12 pages2010 OMAE Straked Riser Design With VIVA PDFMarcNo ratings yet
- Dissertation (Eileen - 16117) PDFDocument68 pagesDissertation (Eileen - 16117) PDFMarcNo ratings yet
- Pollestad JarandDocument114 pagesPollestad JarandMarcNo ratings yet
- DNV - OS - C101 - Design of Offshore Steel Structures, General (LRFD Method) - October 2008Document49 pagesDNV - OS - C101 - Design of Offshore Steel Structures, General (LRFD Method) - October 2008Pat_Rob100% (1)
- Drained Vs Undrained Loadings in Geotechnical EngineeringDocument3 pagesDrained Vs Undrained Loadings in Geotechnical EngineeringMarcNo ratings yet
- WafoLagrange Tutorial 2017Document88 pagesWafoLagrange Tutorial 2017MarcNo ratings yet
- Connection Data Sheet: OD Weight Wall Th. Grade API Drift ConnectionDocument1 pageConnection Data Sheet: OD Weight Wall Th. Grade API Drift ConnectionMarcNo ratings yet
- Wafo Tutorial 2017Document195 pagesWafo Tutorial 2017MarcNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Neutral GR ReactorDocument6 pagesNeutral GR Reactorshasailappan0% (1)
- NAPTIN Graduate Skills Programme BrochureDocument40 pagesNAPTIN Graduate Skills Programme BrochureEngr KushenscottNo ratings yet
- 8 Lightning CalculationDocument75 pages8 Lightning CalculationSamant SauravNo ratings yet
- 4.1. Interaction Light-Matter 2-7-08Document10 pages4.1. Interaction Light-Matter 2-7-08mladen lakicNo ratings yet
- Solution Manual For College Physics 1st Edition by EtkinaDocument46 pagesSolution Manual For College Physics 1st Edition by Etkinaa190286885100% (2)
- AO232786477500en 000201Document6 pagesAO232786477500en 000201creative BrandwiseNo ratings yet
- 8장 마찰-reDocument93 pages8장 마찰-reAzad DuppalaNo ratings yet
- Calorimetry ProblemsDocument3 pagesCalorimetry ProblemsLeticia CarandangNo ratings yet
- Em 123Document76 pagesEm 123Naresh DamaNo ratings yet
- Three-phase motor data sheetDocument1 pageThree-phase motor data sheetatlas tajhizNo ratings yet
- Power Plant OperationDocument5 pagesPower Plant OperationAthira NairNo ratings yet
- What Is A Buck Boost ConverterDocument4 pagesWhat Is A Buck Boost ConverterXavierNo ratings yet
- Induction Generator Starting MethodsDocument5 pagesInduction Generator Starting MethodsChathuranga NagasingheNo ratings yet
- Use of Gas Tables Permitted, Assume Suitable Value For Missing DataDocument2 pagesUse of Gas Tables Permitted, Assume Suitable Value For Missing DataVenkitaraj K PNo ratings yet
- As Physics May 10Document24 pagesAs Physics May 10Tayyaba Mumtaz KhanNo ratings yet
- Ch2 MC Practice Questions With AnswersDocument3 pagesCh2 MC Practice Questions With AnswersKit SzeNo ratings yet
- Senarai Kontraktor Pendawaian SesbDocument14 pagesSenarai Kontraktor Pendawaian SesbFizree AriesNo ratings yet
- DIPPR Physical Properties DatabaseDocument8 pagesDIPPR Physical Properties DatabaseOmar AlmonteNo ratings yet
- Physrevd.13.191 Hawking RadDocument7 pagesPhysrevd.13.191 Hawking RadSteven ChapmanNo ratings yet
- Technical Data: 1300 Series Edi 1306C-E87Tag4Document8 pagesTechnical Data: 1300 Series Edi 1306C-E87Tag4mahmoud khtaNo ratings yet
- EEE 241 EEE 241 Analog Electronics 1 Tutorial Tutorial DR Norlaili Mohd NohDocument42 pagesEEE 241 EEE 241 Analog Electronics 1 Tutorial Tutorial DR Norlaili Mohd NohMd Anwar HossainNo ratings yet
- Preparatory Guide Physics PDFDocument260 pagesPreparatory Guide Physics PDFHasan NawazNo ratings yet
- Broadband Nonreciprocal Thermal Radiation With Weyl Semimetal-Based Pattern-Free HeterostructureDocument4 pagesBroadband Nonreciprocal Thermal Radiation With Weyl Semimetal-Based Pattern-Free HeterostructureGergő BárdosNo ratings yet
- Platinum Resistance Pt100Document9 pagesPlatinum Resistance Pt100Denis BohushNo ratings yet
- Electrical ElectronicsDocument92 pagesElectrical ElectronicstechNo ratings yet
- A Level Physics 22 June2013Document16 pagesA Level Physics 22 June2013Inhamul HassanNo ratings yet
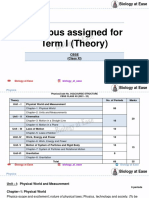
- Syllabus Assigned For Term I (Theory) : Biology at EaseDocument19 pagesSyllabus Assigned For Term I (Theory) : Biology at EaseDILSHAD AYJNISHDNo ratings yet
- Chapter 5-Solid and FluidDocument21 pagesChapter 5-Solid and FluidTonya EnglandNo ratings yet
- LaGrange Method Finds Sphere Terminal VelocityDocument10 pagesLaGrange Method Finds Sphere Terminal Velocityotis-a2No ratings yet