You might also like
- Motor Eléctrico y Homopolar CaseroDocument15 pagesMotor Eléctrico y Homopolar CaseroEnrique CeliNo ratings yet
- Electricidad Por Medio de LimonesDocument1 pageElectricidad Por Medio de LimonesAlberto GarciaNo ratings yet
- Actividad Semana 1 - Motor CaseroDocument6 pagesActividad Semana 1 - Motor CaseroWilfredo Diaz GarciaNo ratings yet
- La Aplicación de La Ley de FaradayDocument11 pagesLa Aplicación de La Ley de FaradayJimmy QuiñonesNo ratings yet
- ElectroimanDocument9 pagesElectroimanEnrique BustosNo ratings yet
- Cerrosion de Los Metales 07Document12 pagesCerrosion de Los Metales 07Rey Ze-lhino Quispe EspinozaNo ratings yet
- Aplicaciones de Las Celdas FotovoltaicasDocument5 pagesAplicaciones de Las Celdas FotovoltaicasCynthia RdzNo ratings yet
- Guía 8 Ley de FaradayDocument5 pagesGuía 8 Ley de FaradayAles PeresNo ratings yet
- Reporte de Como Se Elabora Una Planta de Soldar.Document9 pagesReporte de Como Se Elabora Una Planta de Soldar.Martin' Dejesus Arias ParadaNo ratings yet
- Motor ElectricoDocument5 pagesMotor ElectricoAlbertoRodmanNo ratings yet
- Motor de ArranqueDocument19 pagesMotor de ArranqueLevi RibeiroNo ratings yet
- Informe Experimento Imanes Que LevitanDocument6 pagesInforme Experimento Imanes Que LevitanSaints Quiñones ParimangoNo ratings yet
- ElectroimanDocument8 pagesElectroimanLuisNo ratings yet
- Ciclo de HisteresisDocument2 pagesCiclo de HisteresisEmilio BonnetNo ratings yet
- Movimiento de Los Átomos y Iones en Los MaterialesDocument6 pagesMovimiento de Los Átomos y Iones en Los MaterialesKattia Vazquez100% (1)
- Taller 1 PromodelDocument3 pagesTaller 1 PromodelJorge Armando Sanchez SierraNo ratings yet
- Informe - Transformador Electrico y El Biodo RectificadorDocument21 pagesInforme - Transformador Electrico y El Biodo Rectificadorrobinson altamiranoNo ratings yet
- Motor Casero EléctricoDocument10 pagesMotor Casero EléctricoDARWIN ROJAS VALENCIANo ratings yet
- Proyecto Motor de Jaula de ArdillaDocument3 pagesProyecto Motor de Jaula de ArdillaAna R. Gatjens CNo ratings yet
- Prototipo 2Document14 pagesPrototipo 2Reyes Urbina Aaron Ezmith100% (1)
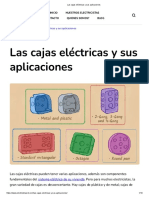
- Las Cajas Eléctricas y Sus AplicacionesDocument10 pagesLas Cajas Eléctricas y Sus AplicacionesJordan MéndezNo ratings yet
- Auto Solar 2 de BotellaDocument3 pagesAuto Solar 2 de BotellaDeku :3No ratings yet
- Molienda de Alta EnergíaDocument15 pagesMolienda de Alta EnergíajjNo ratings yet
- 04 - Definición de Las Unidades EléctricasDocument6 pages04 - Definición de Las Unidades EléctricasSakeru UchihaNo ratings yet
- ElectroimanDocument15 pagesElectroimanAlejandraGómezLlallire100% (2)
- Ensayo Sobre La Electricidad InalámbricaDocument10 pagesEnsayo Sobre La Electricidad InalámbricaCesarNo ratings yet
- Informe de Construcción de Un Motor SencilloDocument4 pagesInforme de Construcción de Un Motor Sencillosteeven youngNo ratings yet
- Introduccion de CorrosionDocument21 pagesIntroduccion de CorrosionKenny Puma PrudencioNo ratings yet
- Informe Generador ElectricoDocument25 pagesInforme Generador ElectricoBoris Yeltsin Ramos Bautista100% (1)
- Informe Practica 2: Superficies EquipotencialesDocument5 pagesInforme Practica 2: Superficies EquipotencialesGabriela GarciaNo ratings yet
- Zinc y Sus AleacionesDocument48 pagesZinc y Sus AleacionesMartin Diaz ZambranoNo ratings yet
- Maquina de WimshurstDocument3 pagesMaquina de WimshurstDaniel HdzNo ratings yet
- Presentacion de ElectrolisisDocument18 pagesPresentacion de ElectrolisisPascual RiveraNo ratings yet
- InductorDocument16 pagesInductorAlex HernándezNo ratings yet
- Construccion de Un Motor Electrico SencilloDocument4 pagesConstruccion de Un Motor Electrico SencilloElizabeth Garcia HidalgoNo ratings yet
- Implementación de Un Motor Lineal DemostrativoDocument4 pagesImplementación de Un Motor Lineal DemostrativoJorge Luis Jaramillo PachecoNo ratings yet
- Ensayo Electricidad en La AtmosferaDocument4 pagesEnsayo Electricidad en La AtmosferaKaren YaimaNo ratings yet
- Informe Diferentes Formas de Energías LimpiasDocument11 pagesInforme Diferentes Formas de Energías LimpiasLIDNY ALEXANDRA MALDONADO RUÍZNo ratings yet
- Fabricacion de Materiales SemiconductoresDocument7 pagesFabricacion de Materiales SemiconductoresJuan Carlos QuezadaNo ratings yet
- La Máquina Electrostática de WimshurstDocument9 pagesLa Máquina Electrostática de WimshurstStefanny HernandezNo ratings yet
- Pila CaceraDocument31 pagesPila CaceranewmanNo ratings yet
- Construcción de Un Transformador CaseroDocument8 pagesConstrucción de Un Transformador CaseroYvala Zamora PercyNo ratings yet
- Investigación Paneles SolaresDocument15 pagesInvestigación Paneles SolaresDarinka Cauich GonzalezNo ratings yet
- Generadores de Corriente ContinuaDocument17 pagesGeneradores de Corriente ContinuaEdgar PérezNo ratings yet
- Proyecto de Celdas Solares A Bajo CostoDocument17 pagesProyecto de Celdas Solares A Bajo CostoOscar ChuquimiaNo ratings yet
- Aplicaciones Electrostáticas PDFDocument10 pagesAplicaciones Electrostáticas PDFhsantiag3No ratings yet
- Articulo CientificoDocument20 pagesArticulo CientificoJG Ramirez MNo ratings yet
- Carro Fotovoltaico (Revisado)Document6 pagesCarro Fotovoltaico (Revisado)JUAN DAVID GUTIERREZ GARCIANo ratings yet
- Practica Del FocoDocument7 pagesPractica Del FocoIvan HdezNo ratings yet
- Informe 1 ElectrostaticaDocument4 pagesInforme 1 ElectrostaticaMelissa MartinezNo ratings yet
- Cálculo Mecánico II-material de Estudio-Semana 1-Unidad II-estructura Atómica y Cristalina de Los MetalesDocument24 pagesCálculo Mecánico II-material de Estudio-Semana 1-Unidad II-estructura Atómica y Cristalina de Los MetalesMalu LeonNo ratings yet
- Viento IonicoDocument1 pageViento IonicoAlam Chi CanoNo ratings yet
- Propiedades Magnéticas de Los ElementosDocument2 pagesPropiedades Magnéticas de Los ElementosMayra Fiorella Palacios Vílchez0% (1)
- Proyecto Rueda HidroeléctricaDocument6 pagesProyecto Rueda HidroeléctricaFraternidad Trans DivergenteNo ratings yet
- Construcción Bobina de TeslaDocument6 pagesConstrucción Bobina de TeslaJhonny Tituaña100% (1)
- Cómo Se Hace Un MonocristalDocument2 pagesCómo Se Hace Un MonocristalHumberto Alejandro RolonNo ratings yet
- Electromagnetism oDocument11 pagesElectromagnetism oDennisTomaloNo ratings yet
- Maquinas FinalDocument14 pagesMaquinas FinalJean Carlos Obada DelgadoNo ratings yet
- Practica 1Document12 pagesPractica 1Eva DiazNo ratings yet
- Homomotores GrupoDocument5 pagesHomomotores GrupoAngel Gabriel Castellanos AguilarNo ratings yet
- Informe de DezplazamientoDocument8 pagesInforme de DezplazamientoYefer Tony Sánchez CáceresNo ratings yet
- Protección en Microcentrales EléctricasDocument15 pagesProtección en Microcentrales EléctricasYefer Tony Sánchez CáceresNo ratings yet
- Medición de La Iluminacia e LuminanciaDocument4 pagesMedición de La Iluminacia e LuminanciaYefer Tony Sánchez CáceresNo ratings yet
- 2.1. - Informe Simulacion de Redondeo TruncamientoDocument4 pages2.1. - Informe Simulacion de Redondeo TruncamientoYefer Tony Sánchez CáceresNo ratings yet
- 1.1. - Informe de Simulacion Conversion Dec Bin Oc HexaDocument9 pages1.1. - Informe de Simulacion Conversion Dec Bin Oc HexaYefer Tony Sánchez CáceresNo ratings yet
- 3° Informe Coversor Digital AnalogicoDocument5 pages3° Informe Coversor Digital AnalogicoYefer Tony Sánchez CáceresNo ratings yet
- 2° - Informe - Convertidor Digital-AnálogicoDocument8 pages2° - Informe - Convertidor Digital-AnálogicoGrensh Layme ChoquepumaNo ratings yet
- Control de TemperaturaDocument1 pageControl de TemperaturaYefer Tony Sánchez CáceresNo ratings yet
- Protección Del Generador en Minicentrales EléctricasDocument7 pagesProtección Del Generador en Minicentrales EléctricasYefer Tony Sánchez Cáceres100% (3)
- 1) Presentación de Los Componentes Del AlternadorDocument61 pages1) Presentación de Los Componentes Del AlternadorYefer Tony Sánchez Cáceres100% (1)
- 01) Laboratorio ResistividadDocument13 pages01) Laboratorio ResistividadYefer Tony Sánchez CáceresNo ratings yet
- Sistemas de Potencia - TareaDocument1 pageSistemas de Potencia - TareaYefer Tony Sánchez CáceresNo ratings yet
- 1) Componentes Constitutivas Del Motor de InducciónDocument56 pages1) Componentes Constitutivas Del Motor de InducciónYefer Tony Sánchez CáceresNo ratings yet
- Sistemas de Potencia - TareaDocument1 pageSistemas de Potencia - TareaYefer Tony Sánchez CáceresNo ratings yet
- Controlador DC Con PidDocument26 pagesControlador DC Con PidYefer Tony Sánchez Cáceres100% (1)
- Ejercicios HcanalesDocument3 pagesEjercicios HcanalesYefer Tony Sánchez CáceresNo ratings yet
- Yefer T. Sánchez Cáceres-Estado Del Alumbrado PublicoDocument55 pagesYefer T. Sánchez Cáceres-Estado Del Alumbrado PublicoYefer Tony Sánchez Cáceres100% (1)
- Practicas Pre Profesionales 1Document4 pagesPracticas Pre Profesionales 1Yefer Tony Sánchez CáceresNo ratings yet
- Yefer Tony Sánchez Cáceres-Examen ResueltoDocument8 pagesYefer Tony Sánchez Cáceres-Examen ResueltoYefer Tony Sánchez CáceresNo ratings yet
- Yefer T. Sánchez Cáceres-FOTOGRAFÍASDocument1 pageYefer T. Sánchez Cáceres-FOTOGRAFÍASYefer Tony Sánchez CáceresNo ratings yet
- Yefer Tony Sánchez Cáceres-Trabajo de PPP IDocument10 pagesYefer Tony Sánchez Cáceres-Trabajo de PPP IYefer Tony Sánchez CáceresNo ratings yet
- Partes de Una Bocatoma Excel y EjerciciosDocument13 pagesPartes de Una Bocatoma Excel y EjerciciosYefer Tony Sánchez CáceresNo ratings yet
- 1.2. Funcionamiento Del Diagrama de FlujosDocument1 page1.2. Funcionamiento Del Diagrama de FlujosYefer Tony Sánchez CáceresNo ratings yet
- 1.2. Curva de Duracion de Caudales PorcentajesDocument1 page1.2. Curva de Duracion de Caudales PorcentajesYefer Tony Sánchez CáceresNo ratings yet
- 1.1. Curva de Duracion de Caudales DiasDocument1 page1.1. Curva de Duracion de Caudales DiasYefer Tony Sánchez CáceresNo ratings yet
- Informe de Las Tareas #1 y #2Document8 pagesInforme de Las Tareas #1 y #2Yefer Tony Sánchez CáceresNo ratings yet
- Examen Quinta Calificada Control I 2013-II-1Document6 pagesExamen Quinta Calificada Control I 2013-II-1Yefer Tony Sánchez CáceresNo ratings yet
- 1.1. PDF Diagrama de Flujos en Visio ProfesionalDocument3 pages1.1. PDF Diagrama de Flujos en Visio ProfesionalYefer Tony Sánchez CáceresNo ratings yet
- Examen Quinta Calificada Control I 2013-II-1Document6 pagesExamen Quinta Calificada Control I 2013-II-1Yefer Tony Sánchez CáceresNo ratings yet
- Modelo Educativo Institucional USMDocument28 pagesModelo Educativo Institucional USMCarlosNo ratings yet
- Clasificación de Los Contratos Según Sus FuncionesDocument3 pagesClasificación de Los Contratos Según Sus FuncionesLenka Portilla100% (1)
- Normas Específicas de Bioseguridad para Desechos HospitalariosDocument8 pagesNormas Específicas de Bioseguridad para Desechos HospitalariosMario PérezNo ratings yet
- Practica 4 - Resistencia de Materiales - Carlos Joo - 2014Document6 pagesPractica 4 - Resistencia de Materiales - Carlos Joo - 2014miguelNo ratings yet
- Articulo 17Document8 pagesArticulo 17Benjamin Andy LunaNo ratings yet
- Proyecto Ucv HoyDocument31 pagesProyecto Ucv HoyMARVIL DELGADO FLORESNo ratings yet
- Tasas Tarifas Davivienda 01 07 2022Document41 pagesTasas Tarifas Davivienda 01 07 2022Cristian Eduardo Zanguña RNo ratings yet
- Encuesta JHDocument3 pagesEncuesta JHJose Agustin Huanilo ReyesNo ratings yet
- La ContabilidadDocument6 pagesLa Contabilidadpablo ayastaNo ratings yet
- Aprehension Filosofico - Hermen - Mejia Garcia, PeruchoDocument168 pagesAprehension Filosofico - Hermen - Mejia Garcia, PeruchoFederico Stellato100% (1)
- Tesis Detalle de Ductos Red de PetroleoDocument197 pagesTesis Detalle de Ductos Red de Petroleofreddy.sucuytanaNo ratings yet
- Reglamento LSHNDocument13 pagesReglamento LSHNPERRACHUDONo ratings yet
- Syllabus Proceso AdministrativoDocument9 pagesSyllabus Proceso AdministrativoFerney Parrado RojasNo ratings yet
- Nop Lasbambas 20 02 Dosaje EtilicoDocument6 pagesNop Lasbambas 20 02 Dosaje EtilicofrancisNo ratings yet
- Credito Cafetero Estrada y Sandoval Version Publicacion 2014Document53 pagesCredito Cafetero Estrada y Sandoval Version Publicacion 2014Nasly TatianaNo ratings yet
- Tesis - Janny Barrera - Gestión PúblicaDocument49 pagesTesis - Janny Barrera - Gestión Públicakevin NaolNo ratings yet
- Vector Normal A Una Superficie Parametria SuaveDocument3 pagesVector Normal A Una Superficie Parametria SuaveSofia Karolina Quiroz NombertoNo ratings yet
- Practicar Sync LinuxDocument3 pagesPracticar Sync Linuxkabuto cNo ratings yet
- Tratamiento de TuberculosisDocument6 pagesTratamiento de TuberculosisJuanita Rosa Navarro CastilloNo ratings yet
- Sociología Jurídica - AntologíaDocument7 pagesSociología Jurídica - AntologíaAndres AlvarezNo ratings yet
- Resumen de Numeros Enteros Paes 2023Document11 pagesResumen de Numeros Enteros Paes 2023Manuel AlarconNo ratings yet
- Respuestas Consulta Pública Reglamento ExtintoresDocument69 pagesRespuestas Consulta Pública Reglamento ExtintoresmarceloolearojasNo ratings yet
- Geometria Descript No2Document12 pagesGeometria Descript No2Didier Cartro RengifoNo ratings yet
- Calibración - Pesometro - RamseyDocument6 pagesCalibración - Pesometro - RamseyJuan SuarezNo ratings yet
- Estudio Técnico Sobre El Nivel de Adopción de Las Tecnologias de Desarrollo de Software en El Municipio de SonsonateDocument114 pagesEstudio Técnico Sobre El Nivel de Adopción de Las Tecnologias de Desarrollo de Software en El Municipio de SonsonateRemberto ContrerasNo ratings yet
- Alba InstitucionalDocument26 pagesAlba Institucionalapi-149138320No ratings yet
- Proyecto HierroDocument18 pagesProyecto HierroDanicho Lara100% (1)
- Gacetadental 250Document310 pagesGacetadental 250kandido33No ratings yet
- TAREA QuimicaDocument13 pagesTAREA QuimicaAlessandro RiquelmeNo ratings yet
- Mitos Tipos de MitosDocument5 pagesMitos Tipos de MitosIan VeraNo ratings yet