You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Lesson 14: Transfer Functions of DC Motors: ET 438a Automatic Control Systems TechnologyDocument28 pagesLesson 14: Transfer Functions of DC Motors: ET 438a Automatic Control Systems TechnologyHeart hea7No ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Paper 6Document4 pagesPaper 6Aisha ShaikhNo ratings yet
- User's Manual: D.C. Motor StudyDocument18 pagesUser's Manual: D.C. Motor Studysurendra parlaNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocument6 pagesMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNo ratings yet
- DC Motor Control PositionDocument8 pagesDC Motor Control Positionreynaldi adeNo ratings yet
- Codes: Course ContentDocument5 pagesCodes: Course ContentAhmed EhabNo ratings yet
- Motor Modeling Based On Physical Effect Models: Dirk Dammers, Patrice Binet, Georg Pelz and Lars M. VoßkämperDocument6 pagesMotor Modeling Based On Physical Effect Models: Dirk Dammers, Patrice Binet, Georg Pelz and Lars M. VoßkämperYuki YusenkiNo ratings yet
- Lecture 4 - DC Machines ApplicationsDocument29 pagesLecture 4 - DC Machines ApplicationsAbdo EssaNo ratings yet
- Lecture 5 - DC Machines Applications - Part2Document12 pagesLecture 5 - DC Machines Applications - Part2Abdo EssaNo ratings yet
- Lab 8 DCMotor ParametersDocument11 pagesLab 8 DCMotor ParametersNikhil PatroNo ratings yet
- AC_Motor pracDocument9 pagesAC_Motor pracK PranavNo ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- Simulink - Simon AMBOISEDocument14 pagesSimulink - Simon AMBOISESimon AmboiseNo ratings yet
- DC Motor2Document19 pagesDC Motor2ahmed albaghdadiNo ratings yet
- Modelling and Simulation of DC Drive Using PI and PID ControllerDocument4 pagesModelling and Simulation of DC Drive Using PI and PID ControllerOTOMASYON PLCNo ratings yet
- Practical: - 01: Aim: - Apparatus: - TheoryDocument3 pagesPractical: - 01: Aim: - Apparatus: - TheoryJay MonparaNo ratings yet
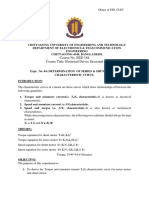
- Exp - 4. Determination of Series & Shunt Motor Characteristic CurveDocument5 pagesExp - 4. Determination of Series & Shunt Motor Characteristic CurveMd KaziNo ratings yet
- QUBE-Servo 2 First Principles Modeling Workbook (Student)Document6 pagesQUBE-Servo 2 First Principles Modeling Workbook (Student)Albert ForeroNo ratings yet
- PE Lecture No.08 PDFDocument15 pagesPE Lecture No.08 PDFmonish halder100% (2)
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroNo ratings yet
- Sarhad University Peshawar: Industrial Drive & PLC Characteristics of Electrical DrivesDocument28 pagesSarhad University Peshawar: Industrial Drive & PLC Characteristics of Electrical DrivesMohsin IqbalNo ratings yet
- DC Ep 6Document8 pagesDC Ep 6Barham Omer HamadNo ratings yet
- Circuit Diagram: Kprient/Eee/Ee8361 Electrical Engineering LaboratoryDocument6 pagesCircuit Diagram: Kprient/Eee/Ee8361 Electrical Engineering LaboratorykavineshNo ratings yet
- Electric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyDocument33 pagesElectric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyNithin Mohan91% (11)
- Transient StabilityDocument62 pagesTransient StabilityAkash IyerNo ratings yet
- Lesson 10 332a PDFDocument17 pagesLesson 10 332a PDFelmer magsinoNo ratings yet
- Exercise 3Document7 pagesExercise 3Ahmed ArfaNo ratings yet
- Power electronics worksheetDocument2 pagesPower electronics worksheetDilamo FelekeNo ratings yet
- DC Motor Equivalent Circuit and Magnetization CurveDocument5 pagesDC Motor Equivalent Circuit and Magnetization CurveLaurence Abrogena AlmazanNo ratings yet
- DCS_Proj1_2024Document2 pagesDCS_Proj1_2024blackman510101No ratings yet
- IMNPE 66 1 2012 Firago VasilyevDocument11 pagesIMNPE 66 1 2012 Firago Vasilyev7amdan S90No ratings yet
- Pid LimnotDocument5 pagesPid LimnotMarco MayoraNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- Predictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyDocument6 pagesPredictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyYerramsetty SreekanthNo ratings yet
- EDCM11Document33 pagesEDCM11yanith kumarNo ratings yet
- CI8 TP MCC Synthese V0Document5 pagesCI8 TP MCC Synthese V0Adahyl GarcezNo ratings yet
- Electrical Machine (DC Motor)Document19 pagesElectrical Machine (DC Motor)Mozammel HossainNo ratings yet
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenNo ratings yet
- Modeling of DC MotorDocument8 pagesModeling of DC MotorKaziiLaggounNo ratings yet
- Outline: Hybrid Powertrains Part 2 Component ModelingDocument5 pagesOutline: Hybrid Powertrains Part 2 Component ModelingAiman NasirNo ratings yet
- Chapter 1 Basic ConceptsDocument9 pagesChapter 1 Basic ConceptsSaruul AriunbatNo ratings yet
- Unit I: Drive CharecteristicsDocument72 pagesUnit I: Drive CharecteristicscvkcvkNo ratings yet
- Fault-Tolerant 5-Phase PM Motor Design TestsDocument8 pagesFault-Tolerant 5-Phase PM Motor Design Testsrakeshee2007No ratings yet
- The Effect of Current Transformer Saturation on Differential Relay PerformanceDocument6 pagesThe Effect of Current Transformer Saturation on Differential Relay Performanceamir amirNo ratings yet
- Design and Simulation of Speed Control of DC Motor Using ChopperDocument8 pagesDesign and Simulation of Speed Control of DC Motor Using ChopperIJIRSTNo ratings yet
- User's Manual: D.C. Motor StudyDocument25 pagesUser's Manual: D.C. Motor Studymanoj_varma_1No ratings yet
- Lab 3 QUBE-Servo First Principles Modeling Workbook (Student)Document6 pagesLab 3 QUBE-Servo First Principles Modeling Workbook (Student)Luis EnriquezNo ratings yet
- Lesson 12 332ac KASSHDocument6 pagesLesson 12 332ac KASSHibnufentaw99No ratings yet
- Design of PID CONTROLLERDocument6 pagesDesign of PID CONTROLLERRAJ KUMAR SHIHINo ratings yet
- Electric Drives - EPM 451-Module 2-DC DrivesDocument82 pagesElectric Drives - EPM 451-Module 2-DC Drivesasmrsamir5No ratings yet
- Control System Lab ManualDocument57 pagesControl System Lab Manualokay45486No ratings yet
- EE-371 Lecture 5: Transfer Functions of DC MotorsDocument13 pagesEE-371 Lecture 5: Transfer Functions of DC MotorsRakhmeen gulNo ratings yet
- Electric Machine: DC MotorDocument42 pagesElectric Machine: DC Motorteza maruNo ratings yet
- DC MotorDocument84 pagesDC MotorMuhammad Fajar PrakasaNo ratings yet
- Modelling and Simulation of Synchronous Machine TRDocument11 pagesModelling and Simulation of Synchronous Machine TRManuelSosaNo ratings yet
- EM Mattaria Ch1Document25 pagesEM Mattaria Ch1Osama AliNo ratings yet
- Hospital-Acquired Infection Rates WorldwideDocument3 pagesHospital-Acquired Infection Rates WorldwideSH WALEEDNo ratings yet
- Home Energy AuditDocument1 pageHome Energy AuditSH WALEEDNo ratings yet
- RPM Measurement Using Governor MechanismDocument6 pagesRPM Measurement Using Governor MechanismSH WALEEDNo ratings yet
- Ghazi Barotha DamDocument9 pagesGhazi Barotha DamSH WALEEDNo ratings yet
- Extraction of Limonene From Citrus RindsDocument25 pagesExtraction of Limonene From Citrus RindsSH WALEEDNo ratings yet
- RPM Measurement Using Governor MechanismDocument6 pagesRPM Measurement Using Governor MechanismSH WALEEDNo ratings yet
- Case StudyDocument13 pagesCase StudySH WALEEDNo ratings yet
- Solar 3Document79 pagesSolar 3sigmasundarNo ratings yet
- Temperature Control System Using ArduinoDocument6 pagesTemperature Control System Using ArduinoSH WALEEDNo ratings yet
- Case StudyDocument13 pagesCase StudySH WALEEDNo ratings yet
- Mangla Dam Power Generation and Raising ProjectDocument9 pagesMangla Dam Power Generation and Raising ProjectSH WALEEDNo ratings yet
- Case Study Ghazi Brotha Dam: Presented byDocument13 pagesCase Study Ghazi Brotha Dam: Presented bySH WALEEDNo ratings yet
- RPM Measurement Using Governor MechanismDocument6 pagesRPM Measurement Using Governor MechanismSH WALEEDNo ratings yet
- Ghazi Barotha DamDocument9 pagesGhazi Barotha DamSH WALEEDNo ratings yet
- Ghazi Barotha DamDocument9 pagesGhazi Barotha DamSH WALEEDNo ratings yet
- Case Study Ghazi Brotha Dam: Presented byDocument13 pagesCase Study Ghazi Brotha Dam: Presented bySH WALEEDNo ratings yet
- Braking Solutions For The: Forklift Truck & Electric Vehicle MarketDocument16 pagesBraking Solutions For The: Forklift Truck & Electric Vehicle Marketivanrey100% (1)
- EM-III JNTUH Previous PapersDocument8 pagesEM-III JNTUH Previous PapersParameshwar TummetiNo ratings yet
- Motors and GeneratorsDocument43 pagesMotors and Generatorsrbtlch1n100% (1)
- Interview Questions MS WordDocument20 pagesInterview Questions MS Wordhassan iftikhar100% (1)
- ECO-FRIENDLY ELECTRIC OUTBOARDDocument6 pagesECO-FRIENDLY ELECTRIC OUTBOARDmarcusNo ratings yet
- Effects of armature reaction in DC machinesDocument2 pagesEffects of armature reaction in DC machinesBALAKRISHNANNo ratings yet
- Alternator by Emf MethodDocument7 pagesAlternator by Emf MethodsakthipriyaNo ratings yet
- CTS Electrician SyllabusDocument22 pagesCTS Electrician SyllabusS K DHALNo ratings yet
- 3 Point Starter Working Principle & ConstructionDocument6 pages3 Point Starter Working Principle & ConstructionsuryavigneNo ratings yet
- EGYCON Lesson 3 - DC Armature Winding Construction Part 1Document15 pagesEGYCON Lesson 3 - DC Armature Winding Construction Part 1yolop100% (1)
- EENG350 Lecture Notes Ch4Document16 pagesEENG350 Lecture Notes Ch4yasmin20No ratings yet
- Oki ManualDocument148 pagesOki ManualCarlos FreitasNo ratings yet
- 2011 Fault Diagnosis of Starter MotorDocument14 pages2011 Fault Diagnosis of Starter MotorAka ShriNo ratings yet
- Electrical Engineering Lab Manual For II Mech Part IDocument54 pagesElectrical Engineering Lab Manual For II Mech Part IArivumani80% (5)
- Manitou Telehandler BT 420 Series 3 Operators Manual enDocument24 pagesManitou Telehandler BT 420 Series 3 Operators Manual enhovy1876100% (4)
- Activity No. 1Document3 pagesActivity No. 1christian paul argenioNo ratings yet
- StuviaDocument1 pageStuviaMohammed AhmedNo ratings yet
- 2365 02 l2 202 Handout 26Document2 pages2365 02 l2 202 Handout 26dvm4yfptzmNo ratings yet
- AC vs DC Motors: Key DifferencesDocument9 pagesAC vs DC Motors: Key DifferencesMOTILAL SUTHAR215291No ratings yet
- Analysis and Design of A High Performance Linear Generator With High Grade Magnetic Cores and High Temperature Superconducting Coils For Oceanic Wave Energy ConversionDocument5 pagesAnalysis and Design of A High Performance Linear Generator With High Grade Magnetic Cores and High Temperature Superconducting Coils For Oceanic Wave Energy ConversionsyazanaNo ratings yet
- Electrical Drives and Control Lecture NotesDocument128 pagesElectrical Drives and Control Lecture NotesHarsha Anantwar83% (6)
- Alternator EMF and Voltage RegulationDocument14 pagesAlternator EMF and Voltage RegulationJohn Vincent HubillaNo ratings yet
- Winding Data For 1600 FrameDocument35 pagesWinding Data For 1600 FrameHalit yalçınkayaNo ratings yet
- NTTF Question BankDocument57 pagesNTTF Question Bankmithunprayag100% (1)
- For More Visit WWW - Ktunotes.in: LI N E ARM O T O RSDocument23 pagesFor More Visit WWW - Ktunotes.in: LI N E ARM O T O RSNANDHAKUMAR ANo ratings yet
- CFE-SS Approach For Salient-Pole Synchronous Generators Under UnbalancesDocument21 pagesCFE-SS Approach For Salient-Pole Synchronous Generators Under UnbalancesMariem MakniNo ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature MachineSeksan KhamkaewNo ratings yet
- Ee6401 IqDocument6 pagesEe6401 IqK.Swetha PriyadharshiniNo ratings yet
- Generator Manual: Installation - Operation - MaintenanceDocument66 pagesGenerator Manual: Installation - Operation - MaintenanceJohn Alexander Bonilla AngelNo ratings yet
- BacksTab 03Document155 pagesBacksTab 03VaishnaviRaviNo ratings yet