You might also like
- 9489 Enp Mexico Akal Ofa Rev1Document47 pages9489 Enp Mexico Akal Ofa Rev1Mijail David Felix Narvaez100% (1)
- Lesson 2 Vector Spaces PDFDocument15 pagesLesson 2 Vector Spaces PDFShela RamosNo ratings yet
- Mock Paper Computer Architecture AnswersDocument26 pagesMock Paper Computer Architecture AnswersYang ZhouNo ratings yet
- Immitance InverterDocument4 pagesImmitance Inverteramitgh88No ratings yet
- NNFL 3unitDocument10 pagesNNFL 3unitv.saigeetha lakshmiNo ratings yet
- Perceptron Model and Learning RuleDocument32 pagesPerceptron Model and Learning Rulevasu_koneti5124No ratings yet
- Perceptons Neural NetworksDocument33 pagesPerceptons Neural NetworkssanthoshiNo ratings yet
- Linear Algebra 3.1Document6 pagesLinear Algebra 3.1Ricardo RossieNo ratings yet
- Perceptons Neural NetworksDocument33 pagesPerceptons Neural Networksvasu_koneti5124No ratings yet
- Displacement of Beams: 8.1 Double Integration MethodDocument18 pagesDisplacement of Beams: 8.1 Double Integration MethodwinzNo ratings yet
- Convolutional Coding and Viterbi Decoding ExplainedDocument30 pagesConvolutional Coding and Viterbi Decoding ExplainedEmNo ratings yet
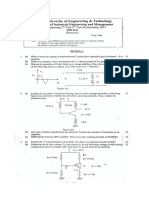
- B.sc. Engineering 2nd Year 2nd Term Regular Examination, 2015Document11 pagesB.sc. Engineering 2nd Year 2nd Term Regular Examination, 2015Zubayer HassanNo ratings yet
- Vector Fields and Solutions To Ordinary Differential Equations UsingDocument10 pagesVector Fields and Solutions To Ordinary Differential Equations UsingphysicsnewblolNo ratings yet
- A Novel Loss Estimation Technique For Power ConverDocument7 pagesA Novel Loss Estimation Technique For Power ConverSridhar MNo ratings yet
- CT 12 All C SectionDocument14 pagesCT 12 All C SectionUmor faruk suptooNo ratings yet
- IES CONV Electrical Engineering 2000Document9 pagesIES CONV Electrical Engineering 2000jitenNo ratings yet
- Extract Pages From (George B. Arfken, Hans J.Document3 pagesExtract Pages From (George B. Arfken, Hans J.Alaa MohyeldinNo ratings yet
- Ps 2Document5 pagesPs 2MITESH UPRETINo ratings yet
- Understanding Horizontal Geodetic Network Precision and Accuracy Determination Using Least Squares TechniqueDocument7 pagesUnderstanding Horizontal Geodetic Network Precision and Accuracy Determination Using Least Squares TechniqueETEJE SYLVESTSTER OKIEMUTE (Ph.D)No ratings yet
- 3 EC IES 2011 Conventional Paper IDocument6 pages3 EC IES 2011 Conventional Paper IBodhisatwa ChowdhuryNo ratings yet
- Towards A Calculus of Echo State Networks: Procedia Computer ScienceDocument6 pagesTowards A Calculus of Echo State Networks: Procedia Computer ScienceEkanshNo ratings yet
- December 2016: AMIETE - ET (Current & New Scheme)Document3 pagesDecember 2016: AMIETE - ET (Current & New Scheme)mraavulaNo ratings yet
- Net09 28Document11 pagesNet09 28shardapatelNo ratings yet
- Appendix C Tensor Indicial Notation in The Approximation of Elasticity Problems 2013 The Finite Element Method Its Basis and Fundamentals Seventh EditDocument10 pagesAppendix C Tensor Indicial Notation in The Approximation of Elasticity Problems 2013 The Finite Element Method Its Basis and Fundamentals Seventh EditLeo Salazar EsquivelNo ratings yet
- EP431: Semiconductor Physics: More Practice Problems..... : X y X yDocument7 pagesEP431: Semiconductor Physics: More Practice Problems..... : X y X yप्रियरंजन सिंह राजपूतNo ratings yet
- Bourlard, Kamp - 1988 - Auto-association by multilayer perceptrons and singular value decompositionDocument4 pagesBourlard, Kamp - 1988 - Auto-association by multilayer perceptrons and singular value decompositionEwerton DuarteNo ratings yet
- State Space For Electric CircuitDocument16 pagesState Space For Electric CircuitThafer MajeedNo ratings yet
- BackPropagation Through TimeDocument6 pagesBackPropagation Through Timemilan gemerskyNo ratings yet
- Cdc1997 To Look atDocument24 pagesCdc1997 To Look atninaNo ratings yet
- Dynamics of Systems Phase Plane Analysis For Nonlinear SystemsDocument25 pagesDynamics of Systems Phase Plane Analysis For Nonlinear SystemsDerry RenaldyNo ratings yet
- Auto-Encoder Based Data Clustering: Abstract. Linear or Non-Linear Data Transformations Are Widely UsedDocument8 pagesAuto-Encoder Based Data Clustering: Abstract. Linear or Non-Linear Data Transformations Are Widely Usedpelican2016No ratings yet
- Power Quality Signal Classification Using Convolutional Neural NetworkDocument10 pagesPower Quality Signal Classification Using Convolutional Neural NetworkBharath ykNo ratings yet
- Assignment 6Document3 pagesAssignment 6sekharNo ratings yet
- VAR Stability AnalysisDocument12 pagesVAR Stability AnalysiscosminNo ratings yet
- Pulse Propagation Along Close Conductors: Numerical Solution of The Telegraph Equations Using MathematicaDocument60 pagesPulse Propagation Along Close Conductors: Numerical Solution of The Telegraph Equations Using MathematicasyedshahabudeenNo ratings yet
- P5 2-Sensor2011Document6 pagesP5 2-Sensor2011Gokul VenugopalNo ratings yet
- Raptis2019 N QueensDocument16 pagesRaptis2019 N Queensraptis.theophanesNo ratings yet
- Endsem 18-19 NIT RKLDocument2 pagesEndsem 18-19 NIT RKLRitunjay GuptaNo ratings yet
- I Computing With Matrices: 1 What Is Numerical Analysis?Document19 pagesI Computing With Matrices: 1 What Is Numerical Analysis?Anonymous zXVPi2PlyNo ratings yet
- Models - Woptics.bandgap Photonic CrystalDocument24 pagesModels - Woptics.bandgap Photonic CrystalAjay GhatakNo ratings yet
- 2019MAST20029 - Assignment 2Document4 pages2019MAST20029 - Assignment 2leonNo ratings yet
- ANN For AHWRDocument4 pagesANN For AHWRvgautambarcNo ratings yet
- Devoirs 1 - Vue D'ensemble de L'optique de FourierDocument4 pagesDevoirs 1 - Vue D'ensemble de L'optique de FourierDIBINo ratings yet
- Homework 0Document6 pagesHomework 0jerryNo ratings yet
- Jnu Pyq 2010Document5 pagesJnu Pyq 2010Manas BiswalNo ratings yet
- Naor 1995Document12 pagesNaor 1995Minh TuấnNo ratings yet
- TutorialDocument6 pagesTutorialspwajeehNo ratings yet
- Indian Institute of Science: RoblemDocument2 pagesIndian Institute of Science: RoblemADSTE ETWNo ratings yet
- Sample Examination PaperDocument5 pagesSample Examination Paperjunehum049No ratings yet
- Degree Program Academic Year Course Code Assignment Course Part - ADocument4 pagesDegree Program Academic Year Course Code Assignment Course Part - Ausha raniNo ratings yet
- Transient Analysis of Microstrip-Like Interconnections Guarded by Ground TracksDocument14 pagesTransient Analysis of Microstrip-Like Interconnections Guarded by Ground TracksSaranya KalaichelvanNo ratings yet
- Ee610 hw2 Au23Document3 pagesEe610 hw2 Au23Manish kumawatNo ratings yet
- IES 2001 EE Conventional Paper01Document4 pagesIES 2001 EE Conventional Paper01Shubham KumarNo ratings yet
- Perceptron: Tirtharaj DashDocument22 pagesPerceptron: Tirtharaj DashKishan Kumar GuptaNo ratings yet
- 나완수 전자기학 - 중간Document1 page나완수 전자기학 - 중간전호정No ratings yet
- Paper 4Document5 pagesPaper 4PavloNo ratings yet
- Understanding Backpropagation Algorithm - Towards Data ScienceDocument11 pagesUnderstanding Backpropagation Algorithm - Towards Data ScienceKashaf BakaliNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- Potpourri GénéralDocument105 pagesPotpourri GénéralMohan AgrawalNo ratings yet
- Comprehensive Analysis of Planck 2015 TT Spectrum Peak PositionsDocument14 pagesComprehensive Analysis of Planck 2015 TT Spectrum Peak PositionsMohan AgrawalNo ratings yet
- Cosmology Lectures Part III Mathematical Trips - Daniel Baumann, CambridgeDocument130 pagesCosmology Lectures Part III Mathematical Trips - Daniel Baumann, CambridgeBrayan del ValleNo ratings yet
- Bertulani 1988Document110 pagesBertulani 1988Mohan AgrawalNo ratings yet
- Glossary of Heat Exchanger TerminologyDocument2 pagesGlossary of Heat Exchanger Terminologypvwander100% (1)
- Market Plan On Vodafone vs. Pakistani OperatorsDocument47 pagesMarket Plan On Vodafone vs. Pakistani OperatorswebscanzNo ratings yet
- Specification (General) Road Concreting ProjectDocument66 pagesSpecification (General) Road Concreting ProjectMARK RANEL RAMOSNo ratings yet
- Sanet - ST Sanet - ST Proceedings of The 12th International Conference On Measurem PDFDocument342 pagesSanet - ST Sanet - ST Proceedings of The 12th International Conference On Measurem PDFmaracaverikNo ratings yet
- Humidifier Servo and Non Servo Mode of DeliveryDocument2 pagesHumidifier Servo and Non Servo Mode of DeliveryAlberth VillotaNo ratings yet
- SuperSafe T (Front Terminal) PG Issue 2 May 2001Document20 pagesSuperSafe T (Front Terminal) PG Issue 2 May 2001Stephen BlommesteinNo ratings yet
- Session Plan (Julaps)Document10 pagesSession Plan (Julaps)Wiljhon Espinola JulapongNo ratings yet
- Operations Management Customer FocusDocument13 pagesOperations Management Customer FocusYusranNo ratings yet
- Database ScriptsDocument111 pagesDatabase ScriptsVikas GaurNo ratings yet
- HelicommandDocument11 pagesHelicommandNandin OnNo ratings yet
- Elizabeth Hokanson - Resume - DB EditDocument2 pagesElizabeth Hokanson - Resume - DB EditDouglNo ratings yet
- PSR 640Document188 pagesPSR 640fer_12_328307No ratings yet
- Personal PositioningDocument4 pagesPersonal PositioningJaveria MasoodNo ratings yet
- Maintain Safe Systems with Maintenance Free EarthingDocument12 pagesMaintain Safe Systems with Maintenance Free EarthingRavi Shankar ChakravortyNo ratings yet
- Hi Tech ApplicatorDocument13 pagesHi Tech ApplicatorSantosh JayasavalNo ratings yet
- Nuclear Medicine Inc.'s Iodine Value Chain AnalysisDocument6 pagesNuclear Medicine Inc.'s Iodine Value Chain AnalysisPrashant NagpureNo ratings yet
- Alejandrino, Michael S. Bsee-3ADocument14 pagesAlejandrino, Michael S. Bsee-3AMichelle AlejandrinoNo ratings yet
- Hybrid SCADA NetworksDocument11 pagesHybrid SCADA NetworksMarisela AlvarezNo ratings yet
- Rilem TC 162-TDF PDFDocument17 pagesRilem TC 162-TDF PDFAref AbadelNo ratings yet
- H Value1Document12 pagesH Value1Sahyog KumarNo ratings yet
- M433 Center of Mass Location Throughout Fuze Arming CycleDocument17 pagesM433 Center of Mass Location Throughout Fuze Arming CycleNORDBNo ratings yet
- Samsung WayDocument8 pagesSamsung WayWilliam WongNo ratings yet
- Module 7: Resolving Network Connectivity IssuesDocument54 pagesModule 7: Resolving Network Connectivity IssuesJosé MarquesNo ratings yet
- MFXi MPMi User Guide 02122010 DraggedDocument1 pageMFXi MPMi User Guide 02122010 DraggedDani BalanNo ratings yet
- Sumit Pandey CVDocument3 pagesSumit Pandey CVSumit PandeyNo ratings yet
- ME116P Weeks 1-4Document243 pagesME116P Weeks 1-4Ska dooshNo ratings yet
- Training Estimator by VladarDocument10 pagesTraining Estimator by VladarMohamad SyukhairiNo ratings yet
- TNEB vacancy cut-off datesDocument7 pagesTNEB vacancy cut-off dateswinvenuNo ratings yet
- Schematic Diagrams: Compact Component SystemDocument12 pagesSchematic Diagrams: Compact Component SystemGustavo DestruelNo ratings yet