You might also like
- Solution Manual - Microelectronics Circuit Analysis & Desing 3rd Edition ch1Document6 pagesSolution Manual - Microelectronics Circuit Analysis & Desing 3rd Edition ch1zaid2099778567% (3)
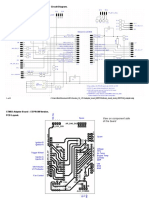
- S3a New Spindle Driver PDFDocument35 pagesS3a New Spindle Driver PDFHubertvcNo ratings yet
- bd8389fv M eDocument21 pagesbd8389fv M eNicrostNo ratings yet
- Connection PlanDocument1 pageConnection PlanThiago VarelaNo ratings yet
- Circuit Descriptions: EN 34 QM16.4E LA 7Document3 pagesCircuit Descriptions: EN 34 QM16.4E LA 7avrelecNo ratings yet
- Block Diagram v5 - 03 PDFDocument1 pageBlock Diagram v5 - 03 PDFSrdjanVuksanNo ratings yet
- Arduino BookDocument17 pagesArduino BookhnuitthitaunglmdNo ratings yet
- ch340g Part 3Document3 pagesch340g Part 3David MoodyNo ratings yet
- Voltage Regulator Ic AP3968 DatasheetDocument15 pagesVoltage Regulator Ic AP3968 Datasheetkanthkk100% (1)
- Main Board Mods EEPROM AdapterDocument6 pagesMain Board Mods EEPROM AdapterAmine HerbacheNo ratings yet
- Arduino Pro Micro - Deskthority WikiDocument3 pagesArduino Pro Micro - Deskthority WikiBlew WhaleNo ratings yet
- Microsquirt-Module Developers Guide-3.4Document17 pagesMicrosquirt-Module Developers Guide-3.4Pedro Felipe Alves de OliveiraNo ratings yet
- Mainboard ESC Model P4M800PRO MDocument29 pagesMainboard ESC Model P4M800PRO MHo Thanh BinhNo ratings yet
- w6100 Ethernet Shield Ds V100eDocument9 pagesw6100 Ethernet Shield Ds V100eLikitha Reddy100% (1)
- Tu Put A Madre 564168Document28 pagesTu Put A Madre 564168joladawehiNo ratings yet
- Operation Manual DCS3T-28 - V2Document23 pagesOperation Manual DCS3T-28 - V2miguel cornelioNo ratings yet
- MT6580 Project Pre-layout SCH TOP LEVEL Block DiagramDocument1 pageMT6580 Project Pre-layout SCH TOP LEVEL Block DiagramLife PowerNo ratings yet
- Analog Style VU Meter On OLED Display - Arduino CompatibleDocument5 pagesAnalog Style VU Meter On OLED Display - Arduino CompatibleSiam_SquareNo ratings yet
- Fatek Facon FB 40mc Chapter - 1Document22 pagesFatek Facon FB 40mc Chapter - 1Charis Michalopoulos50% (2)
- Configure Analog I/O ModulesDocument62 pagesConfigure Analog I/O ModulesBigJNo ratings yet
- Flight Controller F411-Wse: Quick Start GuideDocument3 pagesFlight Controller F411-Wse: Quick Start GuideGokhan OzdemirNo ratings yet
- TI 58 59-HW-manualDocument28 pagesTI 58 59-HW-manualAlejandro MenéndezNo ratings yet
- DRV_G080Y1 Driving Board SpecificationDocument17 pagesDRV_G080Y1 Driving Board SpecificationDaniel Martinez CollazoNo ratings yet
- Application Note - DAC OutputDocument4 pagesApplication Note - DAC OutputCosmin Popescu100% (1)
- TLC 7226Document25 pagesTLC 7226vargasvNo ratings yet
- Siemens S7 300Document8 pagesSiemens S7 300mastorres87No ratings yet
- Mitsubishi FX2N: HMI SettingDocument4 pagesMitsubishi FX2N: HMI SettingRega PrimastaNo ratings yet
- Lenovo B460 - V460 Wistron LA46 UMA 09922-1 Rev1 SchematicDocument48 pagesLenovo B460 - V460 Wistron LA46 UMA 09922-1 Rev1 Schematicnasir khan100% (1)
- Ecs PM800-M2 Rev 1.0Document24 pagesEcs PM800-M2 Rev 1.0Євген СпичакNo ratings yet
- Lenovo b460 v460 Wistron La46uma Laptop ScheaticsDocument48 pagesLenovo b460 v460 Wistron La46uma Laptop ScheaticsVịnh DemoNo ratings yet
- J2/Skylark PCB LAYER detailsDocument42 pagesJ2/Skylark PCB LAYER detailsSyukri AlhamdiNo ratings yet
- Wire Less Stepper Motor Controll Using MicrocontrollerDocument51 pagesWire Less Stepper Motor Controll Using MicrocontrollerAnil ReddyNo ratings yet
- Rockwell DF1 (BCC) : HMI SettingDocument5 pagesRockwell DF1 (BCC) : HMI SettingDavid Andrés Zamorano CarreraNo ratings yet
- Fujitsu Siemens Amilo Li2727 2732 2735 LV1 LV2 Schematic PDFDocument38 pagesFujitsu Siemens Amilo Li2727 2732 2735 LV1 LV2 Schematic PDFZsolt KántorNo ratings yet
- PIC PWM ControllerDocument10 pagesPIC PWM Controllerkeitabando100% (2)
- Manual de Electronica - Pic Programmer All-Flash Usb Kit128Document32 pagesManual de Electronica - Pic Programmer All-Flash Usb Kit128Erik MatomaNo ratings yet
- Project Progress Seminar Phase 2: To Design CNC Machine For PCB MillingDocument23 pagesProject Progress Seminar Phase 2: To Design CNC Machine For PCB Millingantariksh mendheNo ratings yet
- BMW I-Bus Interface AdapterDocument1 pageBMW I-Bus Interface AdapterDavid ALVESNo ratings yet
- TZ Rfid Rd04 (Tag01.Tag02) User Manual V1.4.enDocument16 pagesTZ Rfid Rd04 (Tag01.Tag02) User Manual V1.4.enTodo SNo ratings yet
- POP-BOTlite E PDFDocument100 pagesPOP-BOTlite E PDFColegioEspírituSantoSanAntonioNo ratings yet
- Montaje de Circuitos Electrónicos Básicos en Placa Protoboard y Simulación Con Crocodile ClipsDocument6 pagesMontaje de Circuitos Electrónicos Básicos en Placa Protoboard y Simulación Con Crocodile ClipskennedyNo ratings yet
- MC#1 Turret-WS Manual1Document25 pagesMC#1 Turret-WS Manual1prithwirajroyNo ratings yet
- PCB stackup for 91.4U601.001 DC/DC converter projectDocument51 pagesPCB stackup for 91.4U601.001 DC/DC converter projectEdson HenriqueNo ratings yet
- 945GCT/GZT-M: Page Title of SchematicDocument33 pages945GCT/GZT-M: Page Title of SchematicJean GaroniNo ratings yet
- Mini Smart Car Hardware Installation TutorialDocument16 pagesMini Smart Car Hardware Installation TutorialKiss IstvánNo ratings yet
- Elenberg HT-120Document17 pagesElenberg HT-120bakkinNo ratings yet
- Plume P6 Pro-PGN518 Diagram 2Document15 pagesPlume P6 Pro-PGN518 Diagram 2Life PowerNo ratings yet
- Lenovo 3000 N220 N440 Wistron Anote2.0 AMD - Bak.bak - Bak.bak - BakDocument55 pagesLenovo 3000 N220 N440 Wistron Anote2.0 AMD - Bak.bak - Bak.bak - Bakحسن علي نوفلNo ratings yet
- 945GDocument36 pages945Givan bogdanNo ratings yet
- AVR USB ProgrammerDocument3 pagesAVR USB ProgrammerMohit SharmaNo ratings yet
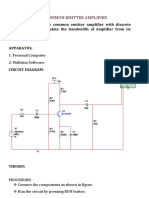
- Common Emitter AmplifierDocument3 pagesCommon Emitter AmplifierNaveedabegum SyedNo ratings yet
- Radxa Zero SCH v1.4 20210709Document9 pagesRadxa Zero SCH v1.4 20210709Abolfazl SaeedieNo ratings yet
- MSD94BDX2: Ver Change List DateDocument17 pagesMSD94BDX2: Ver Change List DateRicardo VieiraNo ratings yet
- MT1389E DVD Demo BoardDocument4 pagesMT1389E DVD Demo BoardEnya Andrea Ribba Hernandez100% (1)
- Wistron GodzillaDocument61 pagesWistron Godzillarodrigootavio5No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Process of The SystemDocument1 pageProcess of The SystemKyaw SoeNo ratings yet
- Capacitor BankDocument16 pagesCapacitor BankKyaw Soe0% (1)
- Notice BoardDocument1 pageNotice BoardKyaw SoeNo ratings yet
- Testing Hardware ResultsDocument12 pagesTesting Hardware ResultsKyaw SoeNo ratings yet
- CHAPTER 1 For Ko KalarDocument4 pagesCHAPTER 1 For Ko KalarKyaw SoeNo ratings yet
- Motor Power CalculationDocument8 pagesMotor Power CalculationKyaw SoeNo ratings yet
- Road Test InspectionDocument2 pagesRoad Test InspectionKyaw SoeNo ratings yet
- Bluetooth DiifferenceDocument2 pagesBluetooth DiifferenceKyaw SoeNo ratings yet
- Design of The ThesisDocument3 pagesDesign of The ThesisKyaw SoeNo ratings yet
- Notice BoardDocument1 pageNotice BoardKyaw SoeNo ratings yet
- DiagramDocument3 pagesDiagramKyaw SoeNo ratings yet
- Chapter (2) Literature ReviewDocument8 pagesChapter (2) Literature ReviewKyaw SoeNo ratings yet
- Receiver of Inductive CouplingDocument2 pagesReceiver of Inductive CouplingKyaw SoeNo ratings yet
- AC Motor Water Valve Coil LCD 16x2Document3 pagesAC Motor Water Valve Coil LCD 16x2Kyaw SoeNo ratings yet
- AC Motor Water Valve Coil LCD 16x2Document3 pagesAC Motor Water Valve Coil LCD 16x2Kyaw SoeNo ratings yet
- Transformer TransformerDocument6 pagesTransformer TransformerKyaw SoeNo ratings yet
- PIC Microcontroller: Interface ControllerDocument2 pagesPIC Microcontroller: Interface ControllerKyaw SoeNo ratings yet
- Capacitor BankDocument16 pagesCapacitor BankKyaw Soe0% (1)
- PIC Microcontroller: Interface ControllerDocument2 pagesPIC Microcontroller: Interface ControllerKyaw SoeNo ratings yet
- Power MosfetsDocument17 pagesPower MosfetsKyaw SoeNo ratings yet
- IoT Smart Agriculture MonitoringDocument34 pagesIoT Smart Agriculture MonitoringKyaw SoeNo ratings yet
- 3 Basic Solar Panel Types ExplainedDocument14 pages3 Basic Solar Panel Types ExplainedKyaw SoeNo ratings yet
- AbstractDocument1 pageAbstractKyaw SoeNo ratings yet
- Chapter 2 NewDocument11 pagesChapter 2 NewKyaw SoeNo ratings yet
- FireFighting - Mcppi CallertableDocument1 pageFireFighting - Mcppi CallertableKyaw SoeNo ratings yet
- Bluetooth DiifferenceDocument2 pagesBluetooth DiifferenceKyaw SoeNo ratings yet
- Bluetooth DiifferenceDocument2 pagesBluetooth DiifferenceKyaw SoeNo ratings yet
- AbstractDocument1 pageAbstractKyaw SoeNo ratings yet
- Chapter-1 IoTDocument5 pagesChapter-1 IoTKyaw SoeNo ratings yet
- Bluetooth DiifferenceDocument2 pagesBluetooth DiifferenceKyaw SoeNo ratings yet
- Solar42 Instruct 01 24Document28 pagesSolar42 Instruct 01 24SheevanNo ratings yet
- ULTRABASS BX4500H Cirquit Scheme Service Manual - 2015!03!14 - Rev.0Document20 pagesULTRABASS BX4500H Cirquit Scheme Service Manual - 2015!03!14 - Rev.0samangelisNo ratings yet
- User Manual: Easylogic Em64Xxh SeriesDocument68 pagesUser Manual: Easylogic Em64Xxh SeriesNandgulab Deshmukh0% (1)
- Annex A - As of 12 May 2016Document26 pagesAnnex A - As of 12 May 2016Zabir AliNo ratings yet
- SENSOR VIB DatasheetDocument2 pagesSENSOR VIB DatasheetcarlosNo ratings yet
- 2021 Price ListDocument114 pages2021 Price ListHelices CostaNo ratings yet
- Micro Ohm MeterDocument14 pagesMicro Ohm MeterSanjay Kumar KanaujiaNo ratings yet
- EL2008 0015en PDFDocument1 pageEL2008 0015en PDFAntoine WATIERNo ratings yet
- Panasonic Automotive Radio SpecificationsDocument48 pagesPanasonic Automotive Radio SpecificationsJimmy Varela Trader100% (1)
- Calibration of Refractory Metal Thermocouples Using A Radiation ThermometerDocument14 pagesCalibration of Refractory Metal Thermocouples Using A Radiation ThermometerleonxjhonNo ratings yet
- Setting parameters for an inverter/charger unitDocument8 pagesSetting parameters for an inverter/charger unitAbdelwhab ElsaftyNo ratings yet
- Kinetix 5100 Servo Drive Fault Codes Reference DataDocument19 pagesKinetix 5100 Servo Drive Fault Codes Reference DataAbil QosimNo ratings yet
- Cellonics Technology Seminar ReportDocument23 pagesCellonics Technology Seminar Reportnm gunasekharNo ratings yet
- Chemistry Art Integration ProjectDocument10 pagesChemistry Art Integration ProjectAnsh Taneja100% (1)
- User Manual CA8335Document116 pagesUser Manual CA8335Achraf ChtibiNo ratings yet
- Mobility Assistance Robot For Disabled Persons Using Electromyography (EMG) SensorDocument5 pagesMobility Assistance Robot For Disabled Persons Using Electromyography (EMG) SensorMushfiqur Rahman JimNo ratings yet
- Compact 97.6% Efficient MIC Series Solar InvertersDocument2 pagesCompact 97.6% Efficient MIC Series Solar InvertersYongki Adi Pratama PutraNo ratings yet
- Herma 400 Ba GB 315150708book BWDocument106 pagesHerma 400 Ba GB 315150708book BWMika Suominen100% (1)
- Split Aire Acondicionado LG Ln0320ccDocument100 pagesSplit Aire Acondicionado LG Ln0320ccJuan Carlos MuñozNo ratings yet
- USOM-100 Ultrasonic Oxygen SensorDocument2 pagesUSOM-100 Ultrasonic Oxygen Sensorsarijan setiklinovNo ratings yet
- DLD Lab Document AnalysisDocument26 pagesDLD Lab Document AnalysisEiman WahabNo ratings yet
- Designing A fuzzy-LQR Controller For STATCOM Based 3-Level Voltage Source ConverterDocument7 pagesDesigning A fuzzy-LQR Controller For STATCOM Based 3-Level Voltage Source ConverternaghamNo ratings yet
- An Overview of Supercapacitors As New Power Sources in Hybrid Energy Storage Systems For Electric VehiclesDocument4 pagesAn Overview of Supercapacitors As New Power Sources in Hybrid Energy Storage Systems For Electric VehiclesGökhan YüksekNo ratings yet
- TroubleshootingDocument52 pagesTroubleshootingIchaNo ratings yet
- Colour TV Service Manual Model C21LB29SDocument30 pagesColour TV Service Manual Model C21LB29SacuarelitobasuraNo ratings yet
- 12V 200Ah VRLA AGM Battery SpecsDocument2 pages12V 200Ah VRLA AGM Battery SpecsUros DrazicNo ratings yet
- Vendor ListDocument1 pageVendor ListpeeramohamedNo ratings yet
- Integrated CircuitsDocument28 pagesIntegrated CircuitsUmaNo ratings yet
- EC Type-Examination Certificate: Reg.-No.: 01/205/5192.02/18Document11 pagesEC Type-Examination Certificate: Reg.-No.: 01/205/5192.02/18Orlando Ortiz VillegasNo ratings yet