You might also like
- Schneider Atv LiftDocument345 pagesSchneider Atv LiftjayNo ratings yet
- SINAMICS G130 FP 1008 EngDocument30 pagesSINAMICS G130 FP 1008 Engsivakscribd100% (1)
- SiemensDocument254 pagesSiemensRogelio ValdezNo ratings yet
- MasterDrive Paramterisation PDFDocument69 pagesMasterDrive Paramterisation PDFSam eagle goodNo ratings yet
- V20 LaunchedDocument147 pagesV20 LaunchedNguyễn Viết HùngNo ratings yet
- Altivar 71Document208 pagesAltivar 71Elvins AguilarNo ratings yet
- ABB ACS880-01-065A-5 PARTS AND QUANTITIESDocument2 pagesABB ACS880-01-065A-5 PARTS AND QUANTITIESThọ NguyễnNo ratings yet
- ATV930 950 Installation Manual en NHA80932 03Document143 pagesATV930 950 Installation Manual en NHA80932 03Anonymous Th1OVYPQYTNo ratings yet
- DCM Converter 0212 en PDFDocument554 pagesDCM Converter 0212 en PDFHa le QuangNo ratings yet
- S2E2 Sinamics G120XADocument47 pagesS2E2 Sinamics G120XAVaibhav Purnale100% (1)
- S120 Startdrive Commiss Man 1218 en-USDocument314 pagesS120 Startdrive Commiss Man 1218 en-USAdam SkrebyNo ratings yet
- WinCC V7.5 Orderdata EuDocument2 pagesWinCC V7.5 Orderdata EufaisalrahmadNo ratings yet
- Motion Control DrivesDocument44 pagesMotion Control DrivesKnjigescribdNo ratings yet
- Sinamics G130 / G150 / S150: OptionsDocument30 pagesSinamics G130 / G150 / S150: OptionsANDRES CISTERNASNo ratings yet
- Ac Induction Motor BrakingDocument9 pagesAc Induction Motor BrakingWrya SaeedNo ratings yet
- Ps-481 Sq-300i Hybrid AvcDocument2 pagesPs-481 Sq-300i Hybrid AvcjayakrishnaNo ratings yet
- Operating Instructions SIMOCRANEDocument186 pagesOperating Instructions SIMOCRANEWhite Tiger100% (2)
- Simovert MasterdrivesDocument8 pagesSimovert Masterdriveseng_mhassan1No ratings yet
- VACON NX All in One Application Guide DPD00903H enDocument354 pagesVACON NX All in One Application Guide DPD00903H enSaasiNo ratings yet
- Installation and Start-Up Guide 11/2002 Edition: Ccu3 Software Version 6 Sinumerik 810DDocument350 pagesInstallation and Start-Up Guide 11/2002 Edition: Ccu3 Software Version 6 Sinumerik 810DS.Dharanipathy100% (5)
- Guideline - en Simotion PDFDocument73 pagesGuideline - en Simotion PDFqaisarharisNo ratings yet
- Ivica Bašić: 6RA70 Series Microprocessor-Based Converters From 6kW To 1900kW For Variable-Speed DC DrivesDocument47 pagesIvica Bašić: 6RA70 Series Microprocessor-Based Converters From 6kW To 1900kW For Variable-Speed DC DrivesdrabniNo ratings yet
- Ansaldo Electric Drives 15/30 kW Technical SpecsDocument4 pagesAnsaldo Electric Drives 15/30 kW Technical SpecsMr.K ch50% (2)
- Drive InverterDocument8 pagesDrive InverterSam eagle goodNo ratings yet
- SIMATIC PCS 7 Cabinet Design: 6/2 6/2 6/3 Basic Cabinet 6/4 ET 200M I/O Unit 6/5 System UnitDocument6 pagesSIMATIC PCS 7 Cabinet Design: 6/2 6/2 6/3 Basic Cabinet 6/4 ET 200M I/O Unit 6/5 System UnitadelswedenNo ratings yet
- Tia Pro1 12 FC FB EngDocument23 pagesTia Pro1 12 FC FB EngJoaquín RpNo ratings yet
- Basics of PLCsDocument88 pagesBasics of PLCshussam aldragmaNo ratings yet
- Abb Acs800 02 ManualDocument156 pagesAbb Acs800 02 Manualjosega123No ratings yet
- Sinamics g120Document472 pagesSinamics g120d-fbuser-56114163No ratings yet
- TIA Pro1 PDFDocument29 pagesTIA Pro1 PDFKerwin GrapaNo ratings yet
- Hardware Configuration: Simatic S7Document25 pagesHardware Configuration: Simatic S7Neagoe CristianNo ratings yet
- Modicon PremiumDocument459 pagesModicon Premiumsalmo83:18No ratings yet
- 6ra70 PDFDocument232 pages6ra70 PDFChowdary MnchowdaryNo ratings yet
- Dps7 eDocument38 pagesDps7 echochoroy0% (1)
- Service On Sinamics ConvertersDocument16 pagesService On Sinamics Converterssiva kumarNo ratings yet
- G120 Fieldbus FCT Man 0418 en-US PDFDocument244 pagesG120 Fieldbus FCT Man 0418 en-US PDFWilson Barco MNo ratings yet
- Encoder Parameterization V43 PDFDocument19 pagesEncoder Parameterization V43 PDFMancamiaicuruNo ratings yet
- SERV1 05E SymbolicDocument14 pagesSERV1 05E SymbolicAhmed KhairiNo ratings yet
- Vincotech Power Modules CatalogDocument134 pagesVincotech Power Modules CataloglizxcanoNo ratings yet
- Master Drive 6RA70 Parameter ListDocument186 pagesMaster Drive 6RA70 Parameter Listsanjaya srivastava100% (3)
- m340 Canopen Altivar Lexium Tesysu Preventa en PDFDocument154 pagesm340 Canopen Altivar Lexium Tesysu Preventa en PDFpham anhNo ratings yet
- Positioning of The Modular S7 Controllers ........................................................... 1-2Document16 pagesPositioning of The Modular S7 Controllers ........................................................... 1-2MiguelGonzalezNo ratings yet
- Abb Acs310-1Document50 pagesAbb Acs310-1osrinivas1234No ratings yet
- MasterDrives Compact A D InvertersDocument385 pagesMasterDrives Compact A D InvertersTuyen TruongNo ratings yet
- ABB Standard Drives: ACS550, 0.75 To 355 KW / 1 To 500 HP Technical CatalogueDocument16 pagesABB Standard Drives: ACS550, 0.75 To 355 KW / 1 To 500 HP Technical CatalogueselvnNo ratings yet
- Siemens Master Drive MaintenanceDocument43 pagesSiemens Master Drive MaintenanceElnur MamedovNo ratings yet
- d05 Cpu315 Et200s PDFDocument34 pagesd05 Cpu315 Et200s PDFMazarel AurelNo ratings yet
- HMI - WinCC FlexibleDocument1 pageHMI - WinCC FlexiblepfalencarNo ratings yet
- PRO2 01eDocument14 pagesPRO2 01eghita_gabrielNo ratings yet
- MDM23 Plus PDFDocument13 pagesMDM23 Plus PDFJesse JoabeNo ratings yet
- PowerFlex 70Document48 pagesPowerFlex 70Daniel PuenteNo ratings yet
- SIRIUS Datasheet P-1Document100 pagesSIRIUS Datasheet P-1madhan_22No ratings yet
- Prepare ACS550 Drive for InstallationDocument2 pagesPrepare ACS550 Drive for InstallationDBIBI ADBINo ratings yet
- Acs 550Document2 pagesAcs 550potoculNo ratings yet
- (3AUA0000001558)_ACS550-U1_QS_REVF FG kndDocument2 pages(3AUA0000001558)_ACS550-U1_QS_REVF FG kndPrdptiwariNo ratings yet
- Quick Guide - IP Cameras - NEW2 - ENG - v4Document2 pagesQuick Guide - IP Cameras - NEW2 - ENG - v4Juan Alberto González TriviñoNo ratings yet
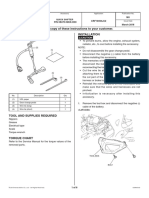
- Quick Shifter 08U70-MKK-D00Document6 pagesQuick Shifter 08U70-MKK-D00Anonymous 8w6kFviL100% (1)
- AWU NUEVADocument19 pagesAWU NUEVAvaldequijoteNo ratings yet
- En Acs355 Qisg C A3Document2 pagesEn Acs355 Qisg C A3Ousséma DridiNo ratings yet
- Don Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboFrom EverandDon Casey's Complete Illustrated Sailboat Maintenance Manual: Including Inspecting the Aging Sailboat, Sailboat Hull and Deck Repair, Sailboat Refinishing, SailboRating: 4.5 out of 5 stars4.5/5 (12)
- Betagard 6520 High PH Membrane CleanerDocument1 pageBetagard 6520 High PH Membrane CleanerZul KarnaenNo ratings yet
- DANFOSS CascadeControllerOptionInstructionManual PDFDocument68 pagesDANFOSS CascadeControllerOptionInstructionManual PDFRandy LangleyNo ratings yet
- Brosur PumpDocument7 pagesBrosur PumpZul KarnaenNo ratings yet
- 18.10-W.111-Ebd Bauer Ro Raw Water AnalysisDocument1 page18.10-W.111-Ebd Bauer Ro Raw Water AnalysisZul KarnaenNo ratings yet
- 19 43 1 PBDocument6 pages19 43 1 PBsahriNo ratings yet
- 18.10-W.111-Ebd Bauer Ro Raw Water AnalysisDocument1 page18.10-W.111-Ebd Bauer Ro Raw Water AnalysisZul KarnaenNo ratings yet
- Brosur PumpDocument7 pagesBrosur PumpZul KarnaenNo ratings yet
- 19 43 1 PBDocument6 pages19 43 1 PBsahriNo ratings yet
- 19 43 1 PBDocument6 pages19 43 1 PBsahriNo ratings yet
- Brosur PumpDocument7 pagesBrosur PumpZul KarnaenNo ratings yet
- Acs550 Acs550 02 289a 4 PN 160kw I2n 289 A Ip21Document2 pagesAcs550 Acs550 02 289a 4 PN 160kw I2n 289 A Ip21Zul KarnaenNo ratings yet
- Energizer Batteries, Chargers and Electrical Equipment Price ListDocument28 pagesEnergizer Batteries, Chargers and Electrical Equipment Price ListZainal Arifin67% (3)
- ABB ACS355 CatalogDocument15 pagesABB ACS355 CatalogZul KarnaenNo ratings yet
- PLC Nano Versi 4Document1 pagePLC Nano Versi 4Deri Yana Mabrur100% (2)
- Acs550 Acs550 02 289a 4 PN 160kw I2n 289 A Ip21Document2 pagesAcs550 Acs550 02 289a 4 PN 160kw I2n 289 A Ip21Zul KarnaenNo ratings yet
- 2017 Product CatalogDocument32 pages2017 Product CatalogZul KarnaenNo ratings yet
- 8900.090-1 Rev K English Manual-1Document52 pages8900.090-1 Rev K English Manual-1Zul KarnaenNo ratings yet
- 18.10-W.111-Ebd Bauer Ro Raw Water AnalysisDocument1 page18.10-W.111-Ebd Bauer Ro Raw Water AnalysisZul KarnaenNo ratings yet
- Motor Starter Components Finder - LC1D40AM7 PDFDocument7 pagesMotor Starter Components Finder - LC1D40AM7 PDFZul KarnaenNo ratings yet
- Prepare ACS550 Drive in Less Than 40 StepsDocument2 pagesPrepare ACS550 Drive in Less Than 40 StepsZul KarnaenNo ratings yet
- Prepare ACS550 Drive in Less Than 40 StepsDocument2 pagesPrepare ACS550 Drive in Less Than 40 StepsZul KarnaenNo ratings yet
- 150A contactor for motor control up to 100kWDocument7 pages150A contactor for motor control up to 100kWZul KarnaenNo ratings yet
- Prepare ACS550 Drive in Less Than 40 StepsDocument2 pagesPrepare ACS550 Drive in Less Than 40 StepsZul KarnaenNo ratings yet
- Acsr SPLN 41-7Document2 pagesAcsr SPLN 41-7Zul KarnaenNo ratings yet
- Chapter 1 Digital Communication - CompressedDocument46 pagesChapter 1 Digital Communication - CompressedToluwani AyubaNo ratings yet
- Korg D-Series RecordersDocument17 pagesKorg D-Series RecordersapkoumnasNo ratings yet
- YCMOU-AST Syllabus T24 Diploma in Mechanical EngineeringDocument101 pagesYCMOU-AST Syllabus T24 Diploma in Mechanical Engineeringsanchu1981No ratings yet
- VBN Vib 13 062 e C Ac3mo 038Document28 pagesVBN Vib 13 062 e C Ac3mo 038roberto_monguzziNo ratings yet
- CELDA LCD-100K DatasheetDocument2 pagesCELDA LCD-100K DatasheetJOSENo ratings yet
- JCCI - Evaluation of FSK Backscatter Tag Signal Response Using FMCW Radar System at Mmwave Frequency in Rich Clutter Noise EnvironmentDocument1 pageJCCI - Evaluation of FSK Backscatter Tag Signal Response Using FMCW Radar System at Mmwave Frequency in Rich Clutter Noise Environmentfathul muinNo ratings yet
- APCN Series Screw Chillers: Range 45 TR To 470 TR (158 KW To 1600 KW)Document43 pagesAPCN Series Screw Chillers: Range 45 TR To 470 TR (158 KW To 1600 KW)Ahmad Salah100% (1)
- 20m Elevated Vertical Antenna DesignDocument5 pages20m Elevated Vertical Antenna Designleonardo_manzanoNo ratings yet
- Solenoid Valve Mini Catalog PDFDocument255 pagesSolenoid Valve Mini Catalog PDFCh Jameel SidhuNo ratings yet
- SKYAIRDocument23 pagesSKYAIRTatiana DiazNo ratings yet
- High Resolution Spectral Analysis Using Channelizers: Ricardo LosadaDocument41 pagesHigh Resolution Spectral Analysis Using Channelizers: Ricardo Losadarajsha333No ratings yet
- PM FormatDocument51 pagesPM FormatKevin LexterNo ratings yet
- SDB CVDocument3 pagesSDB CVashwini32No ratings yet
- Ma Abb VSC (En)Document28 pagesMa Abb VSC (En)Wiliam CopacatiNo ratings yet
- MR 96aDocument53 pagesMR 96aAnonymous GhWU5YK8No ratings yet
- lm80 nt441 15 - CDocument103 pageslm80 nt441 15 - CAdhiezzz GamingNo ratings yet
- RTU Research on Electricity's Role in Daily LifeDocument6 pagesRTU Research on Electricity's Role in Daily LifeCALLOS, JOMEL C.No ratings yet
- CM Surgical Lamp PPDocument13 pagesCM Surgical Lamp PPHyacinthe KOSSINo ratings yet
- CNG Reducers Model At12 SuperDocument2 pagesCNG Reducers Model At12 SuperjovicatrpcevicNo ratings yet
- Users Manual: Power Quality LoggerDocument70 pagesUsers Manual: Power Quality LoggerAndrew SetiawanNo ratings yet
- Ilevil 3 AW Installation Instructions 1Document10 pagesIlevil 3 AW Installation Instructions 1George Cunha LimaNo ratings yet
- 00257650-0000-48EG-0001 - Rev PB - Instrumentation Requirements For Packaged EquipmentDocument17 pages00257650-0000-48EG-0001 - Rev PB - Instrumentation Requirements For Packaged EquipmentSubrata DasNo ratings yet
- High Frequency Transformer Linked Converters For Photovoltaic Applications Q Li (Thesis) (2006)Document414 pagesHigh Frequency Transformer Linked Converters For Photovoltaic Applications Q Li (Thesis) (2006)Anonymous fqHGrbwxeFNo ratings yet
- 2017-10-01 Siltech Retail Pricelist Met BTW - 0 PDFDocument13 pages2017-10-01 Siltech Retail Pricelist Met BTW - 0 PDFانس الكردي0% (1)
- Learning Module in Science 10 Q2 Week 1Document7 pagesLearning Module in Science 10 Q2 Week 1jaspher100% (1)
- On Solar Updraft TowerDocument18 pagesOn Solar Updraft TowerSunil Kumar Singh100% (1)
- Digital Oscilloscope Mso5202dDocument78 pagesDigital Oscilloscope Mso5202dNoorlida KamarudinNo ratings yet
- High Performance Stepper System ControllerDocument107 pagesHigh Performance Stepper System Controllerxor_45No ratings yet
- Independent testing lab reportDocument26 pagesIndependent testing lab reportlatifNo ratings yet
- Air Cooled Screw Chiiler - APSaDocument190 pagesAir Cooled Screw Chiiler - APSaKhaleel Butt100% (1)