You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- JCB Drivetrain System 9803-9240 Service ManualDocument108 pagesJCB Drivetrain System 9803-9240 Service ManualMarcin Marszałek100% (1)
- The On-Line Mud Logging HandbookDocument59 pagesThe On-Line Mud Logging HandbookVictorCalin100% (1)
- HV Cable Test Report 1Document3 pagesHV Cable Test Report 1prabhumanoc100% (1)
- Pe Pipelines Pressure Testing Handbook En805Document26 pagesPe Pipelines Pressure Testing Handbook En805Alin Dumitru100% (1)
- Pogil Cellular Respiration-SDocument6 pagesPogil Cellular Respiration-Sapi-262378640No ratings yet
- Principals of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient AnalysisDocument43 pagesPrincipals of Vibration Analysis With Femap and NX Nastran From Normal Modes To PSD To Direct Transient Analysisnitouch35640% (1)
- HSR 1.63 (For HYSYS V10.0)Document4 pagesHSR 1.63 (For HYSYS V10.0)Ba Jun Thối0% (1)
- Ammonite succeSSIon at The Bajocian/Bathonian Boundary in The Cabo Mondego Region (Portugal)Document12 pagesAmmonite succeSSIon at The Bajocian/Bathonian Boundary in The Cabo Mondego Region (Portugal)VictorCalinNo ratings yet
- 2008 PPP Leeothers PDFDocument28 pages2008 PPP Leeothers PDFVictorCalinNo ratings yet
- 8 Kostak PDFDocument6 pages8 Kostak PDFVictorCalinNo ratings yet
- Lehmann 2015 Ammonite BiostratigraphyDocument28 pagesLehmann 2015 Ammonite BiostratigraphyVictorCalinNo ratings yet
- Taxonomic Revision of Deep-Sea Ostracoda From The Arctic OceanDocument47 pagesTaxonomic Revision of Deep-Sea Ostracoda From The Arctic OceanVictorCalinNo ratings yet
- Anexa 5 Sanador - Analize MedicaleDocument36 pagesAnexa 5 Sanador - Analize MedicaleVictorCalinNo ratings yet
- ArgileDocument12 pagesArgileVictorCalinNo ratings yet
- CNQ#1 PDFDocument32 pagesCNQ#1 PDFareejaNo ratings yet
- A Mathematical Model For The Spatiotemporal Epidemic Spreading of COVID19Document13 pagesA Mathematical Model For The Spatiotemporal Epidemic Spreading of COVID19Barbara BusanelloNo ratings yet
- 2 Separator 123 KV in Linie-Paralel Fara CLP - B92145MCDC09-B - R00Document2 pages2 Separator 123 KV in Linie-Paralel Fara CLP - B92145MCDC09-B - R00Nicolae Dan OnacaNo ratings yet
- Traffic Flow Theory and Delay - Part6Document5 pagesTraffic Flow Theory and Delay - Part6Sai Kumar0% (1)
- Business Combinations : Ifrs 3Document45 pagesBusiness Combinations : Ifrs 3alemayehu100% (1)
- Step-by-Step Guide: How To Book An For: Appointment Tracker ExchangeDocument4 pagesStep-by-Step Guide: How To Book An For: Appointment Tracker ExchangeJames NgNo ratings yet
- Guia 4. Mov Aparente SolDocument4 pagesGuia 4. Mov Aparente SolAlexa ContrerasNo ratings yet
- A Computer-Based Optimization Method For: Archives FEB 24 1970Document325 pagesA Computer-Based Optimization Method For: Archives FEB 24 1970Age MaradiagaNo ratings yet
- Fritz 2003Document10 pagesFritz 2003Sandro PerilloNo ratings yet
- Power Generation Using Forearm Gym EquipmentDocument7 pagesPower Generation Using Forearm Gym EquipmentIJRASETPublicationsNo ratings yet
- Deepwater Development OverviewDocument11 pagesDeepwater Development OverviewBarry HiiNo ratings yet
- ISEB CE CASE Mathematics 13 Specification 2020 11.22Document35 pagesISEB CE CASE Mathematics 13 Specification 2020 11.22agastyazadNo ratings yet
- RN Nemo Outdoor 7 6 0 7 30th June 2015Document55 pagesRN Nemo Outdoor 7 6 0 7 30th June 2015yatishjainkotaNo ratings yet
- Repeaters in CDMA and UMTS CellularDocument86 pagesRepeaters in CDMA and UMTS CellularJoseph ShapiraNo ratings yet
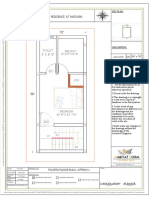
- Fourth Floor PlanDocument1 pageFourth Floor Planvenkatalakshmi natarasanNo ratings yet
- Kurose - Ross - Chapter - 6 - KC (18) - Attempt ReviewDocument20 pagesKurose - Ross - Chapter - 6 - KC (18) - Attempt ReviewG JNo ratings yet
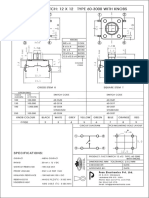
- Tact Micro Switch 12X12Document1 pageTact Micro Switch 12X12Solin CozNo ratings yet
- ProblemsDocument99 pagesProblemsaayushman0070% (1)
- Botta-Dukát 2005 (RaoQ)Document8 pagesBotta-Dukát 2005 (RaoQ)BeatrizNo ratings yet
- TPS51117 Single Synchronous Step-Down Controller: 1 Features 3 DescriptionDocument33 pagesTPS51117 Single Synchronous Step-Down Controller: 1 Features 3 Descriptionjhon agredoNo ratings yet
- Swap Sector & Wrong Azimuth - JBDocument19 pagesSwap Sector & Wrong Azimuth - JBPaulus SihombingNo ratings yet
- Chapter 6 - SectioningDocument44 pagesChapter 6 - SectioningShaktivell LetchumananNo ratings yet
- Soy Sauce Production FinalDocument40 pagesSoy Sauce Production Finalafidah99No ratings yet
- Arithmetic Progressons (Part-1)Document16 pagesArithmetic Progressons (Part-1)shambhaviNo ratings yet