You might also like
- 1154545842TIPM Fuel Pump Relay Solutions and Repairs (Ram, Caravan, Town & Country) - Vertical VisionsDocument6 pages1154545842TIPM Fuel Pump Relay Solutions and Repairs (Ram, Caravan, Town & Country) - Vertical VisionsAnelNo ratings yet
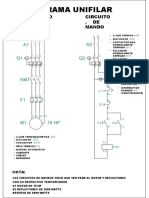
- Diagrama UnifilarDocument1 pageDiagrama UnifilarWinston Coacalla LaricoNo ratings yet
- Lab - Física 1 - Práctica 1 - Conocimiento y Operación de Instrumentosde Medición Empleados en Curso de Física IDocument3 pagesLab - Física 1 - Práctica 1 - Conocimiento y Operación de Instrumentosde Medición Empleados en Curso de Física IOtrebor Rapl100% (2)
- ConstruyetDocument31 pagesConstruyetLarist Cor HerNo ratings yet
- Practica 3 Resistencias VariablesDocument2 pagesPractica 3 Resistencias Variablesapi-582708102No ratings yet
- 31 ACP SoluDocument4 pages31 ACP Soluxavier ripollNo ratings yet
- Fuerza SDocument18 pagesFuerza SFARID BARROSNo ratings yet
- Fuerza SDocument18 pagesFuerza SFARID BARROSNo ratings yet
- Fuerza SDocument18 pagesFuerza SFARID BARROSNo ratings yet
- Leyesdenewton Dinmica 120305180555 Phpapp02Document15 pagesLeyesdenewton Dinmica 120305180555 Phpapp02dagobertoNo ratings yet
- Leyesdekepler 170727032507Document14 pagesLeyesdekepler 170727032507Otrebor RaplNo ratings yet
- Leccion 6 - Coordinar Diferentes Tipos de VistaDocument2 pagesLeccion 6 - Coordinar Diferentes Tipos de VistaJuan Carlos GarcíaNo ratings yet
- FISICA I - Reactivos Del Bloque 4Document2 pagesFISICA I - Reactivos Del Bloque 4Otrebor RaplNo ratings yet
- Leyesdekepler 170727032507Document14 pagesLeyesdekepler 170727032507Otrebor RaplNo ratings yet
- Leyesdenewton 130820165600 Phpapp02Document11 pagesLeyesdenewton 130820165600 Phpapp02Otrebor RaplNo ratings yet
- FISICA I - Reactivos Del Bloque 3Document2 pagesFISICA I - Reactivos Del Bloque 3Otrebor RaplNo ratings yet
- Leyesdenewton 130820165600 Phpapp02Document11 pagesLeyesdenewton 130820165600 Phpapp02Otrebor RaplNo ratings yet
- FISICA II - Reactivos Del Bloque 2Document9 pagesFISICA II - Reactivos Del Bloque 2Otrebor Rapl100% (1)
- FISICA I - Reactivos Del Bloque 2Document5 pagesFISICA I - Reactivos Del Bloque 2Otrebor RaplNo ratings yet
- FISICA I - Reactivos Del Bloque 3Document2 pagesFISICA I - Reactivos Del Bloque 3Otrebor RaplNo ratings yet
- FISICA I - Reactivos Del Bloque 4Document2 pagesFISICA I - Reactivos Del Bloque 4Otrebor RaplNo ratings yet
- Diferencias entre método gráfico y analítico vectoresDocument3 pagesDiferencias entre método gráfico y analítico vectoresOtrebor Rapl100% (1)
- FISICA I - Reactivos Del Bloque 1Document5 pagesFISICA I - Reactivos Del Bloque 1Otrebor RaplNo ratings yet
- Lab Física I - Práctica 5 - Movimiento Uniformemente AceleradoDocument2 pagesLab Física I - Práctica 5 - Movimiento Uniformemente AceleradoOtrebor RaplNo ratings yet
- FISICA I - Reactivos Del Bloque 1Document5 pagesFISICA I - Reactivos Del Bloque 1Otrebor RaplNo ratings yet
- FISICA I - Reactivos Del Bloque 2Document5 pagesFISICA I - Reactivos Del Bloque 2Otrebor RaplNo ratings yet
- Actividad b2.4 "Movimiento en Una Dimensión"Document4 pagesActividad b2.4 "Movimiento en Una Dimensión"Otrebor RaplNo ratings yet
- Magnitudes deportivasDocument3 pagesMagnitudes deportivasOtrebor Rapl100% (1)
- Lab Física I - Práctica 4 - Movimiento UniformeDocument2 pagesLab Física I - Práctica 4 - Movimiento UniformeOtrebor RaplNo ratings yet
- Lab Física I - Práctica 3 - Aplicación de VectoresDocument2 pagesLab Física I - Práctica 3 - Aplicación de VectoresOtrebor RaplNo ratings yet
- Lab Física I - Práctica 2 - Método Científico ExperimentalDocument3 pagesLab Física I - Práctica 2 - Método Científico ExperimentalOtrebor RaplNo ratings yet
- Actividad b1.1 Línea Del TiempoDocument1 pageActividad b1.1 Línea Del TiempoOtrebor RaplNo ratings yet
- mapaING ENERGIAS RENOVABLESDocument3 pagesmapaING ENERGIAS RENOVABLESOtrebor RaplNo ratings yet
- Conversión unidades obesidadDocument3 pagesConversión unidades obesidadOtrebor Rapl100% (2)
- Solucion Actividad 4.6 Divisor Tension y FotosistenciaDocument4 pagesSolucion Actividad 4.6 Divisor Tension y FotosistenciaYagoNo ratings yet
- Distancias de conmutación de sensores de proximidad inductivos, capacitivos, ópticos y ultrasónicosDocument5 pagesDistancias de conmutación de sensores de proximidad inductivos, capacitivos, ópticos y ultrasónicosDanny Urtecho PonteNo ratings yet
- Guías 5 - 6 Sensores de TemperaturaDocument17 pagesGuías 5 - 6 Sensores de TemperaturaEnzo AlvaroNo ratings yet
- M02 - Costa - Aula Primaria - IieeDocument6 pagesM02 - Costa - Aula Primaria - IieeEudes Armas MatosNo ratings yet
- Catalogo SuburbanaDocument17 pagesCatalogo SuburbanaEstefania NietoNo ratings yet
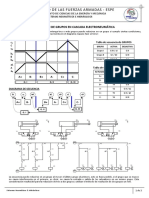
- SNH - Reduccion de Grupos en CascadaDocument2 pagesSNH - Reduccion de Grupos en CascadaMat EnriqueNo ratings yet
- Baterías de NiCd y NiMH PDFDocument7 pagesBaterías de NiCd y NiMH PDFRaul AlvarezNo ratings yet
- Electronic Level Controllers For Liquid Conductors: Controladores Electrónicos de Nivel para Líquidos ConductoresDocument4 pagesElectronic Level Controllers For Liquid Conductors: Controladores Electrónicos de Nivel para Líquidos ConductoresL Miguel Gonzalez SanchezNo ratings yet
- Lámparas LED alta potencia E27 y E40Document3 pagesLámparas LED alta potencia E27 y E40MatiNo ratings yet
- Manual Indicador de VelocidadDocument28 pagesManual Indicador de VelocidadJeann Ramirez GonzalezNo ratings yet
- SOS-097 Materiales IIEE Yuri ParhuanaDocument2 pagesSOS-097 Materiales IIEE Yuri ParhuanaPamela Wu AquijeNo ratings yet
- Kit 37 sensores ArduinoDocument3 pagesKit 37 sensores ArduinoJavier QuinteroNo ratings yet
- 524 GECOMD Genset Control AMFDocument40 pages524 GECOMD Genset Control AMFahmed khodja karimNo ratings yet
- LUMINARIADocument2 pagesLUMINARIAADHCNo ratings yet
- Ilukon Panel Backlight SCCTDocument1 pageIlukon Panel Backlight SCCTRafael PeraltaNo ratings yet
- Taller Combustibles Corte 3Document6 pagesTaller Combustibles Corte 3Ana Sofia Orjuela BernalNo ratings yet
- 2012 Chevrolet S10 X2 (LE6)Document5 pages2012 Chevrolet S10 X2 (LE6)Men PanhaNo ratings yet
- Sistema de Informacion Gerencial - Act. 7Document1,037 pagesSistema de Informacion Gerencial - Act. 7DeltaNo ratings yet
- Lista de Partes - Allen-Bradley PDFDocument628 pagesLista de Partes - Allen-Bradley PDFrosneyNo ratings yet
- TERMISTORDocument15 pagesTERMISTORVinicio ParraNo ratings yet
- Cargador de Baterías de LiDocument8 pagesCargador de Baterías de LiJuan LemaNo ratings yet
- LuxliteDocument14 pagesLuxliteEduardo QuintanaNo ratings yet
- Control Eléctrico de Los Sistemas Neumáticos: FluidosDocument73 pagesControl Eléctrico de Los Sistemas Neumáticos: FluidosMi LuanaNo ratings yet
- 7 Sistema ElectricoDocument14 pages7 Sistema ElectricoJOSHUE100% (1)
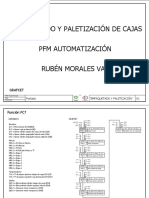
- Ejemplo Grafcet Programa EstructuradoDocument9 pagesEjemplo Grafcet Programa EstructuradoNuria Hernández GonzálezNo ratings yet
- 4-V4-2630-Pr-Pid-000014 - 1 Simbología - Típico Control de VálvulasDocument1 page4-V4-2630-Pr-Pid-000014 - 1 Simbología - Típico Control de VálvulasMarcelo salinasNo ratings yet