You might also like
- LABORATORIO DE MATEMATICA E FISICA - Movimento Retilíneo Uniformemente Variado (MRUV) - Relatório - Unid 3Document5 pagesLABORATORIO DE MATEMATICA E FISICA - Movimento Retilíneo Uniformemente Variado (MRUV) - Relatório - Unid 3Fernando César Zanco75% (8)
- Lista Exercicios Angulos Complementares SuplementaresDocument1 pageLista Exercicios Angulos Complementares SuplementaresSimoni Benicio81% (31)
- 333l Projeto de MecanismosDocument40 pages333l Projeto de MecanismosallanNo ratings yet
- LABORATORIO DE MATEMATICA E FISICA - Movimento Retilíneo Uniformemente Variado (MRUV) - Relatório - Unid 3 - RESPOSTASDocument6 pagesLABORATORIO DE MATEMATICA E FISICA - Movimento Retilíneo Uniformemente Variado (MRUV) - Relatório - Unid 3 - RESPOSTASProfessor Ronaldo Queiroz100% (1)
- Abnt 27001-2013Document36 pagesAbnt 27001-2013Moisés Neri100% (2)
- Considere As Seguintes InformaçõesDocument10 pagesConsidere As Seguintes InformaçõesrwurdigNo ratings yet
- 1º Semestre CCM.Document27 pages1º Semestre CCM.Flavio Antonio Correa0% (1)
- Tantra - A Suprema Compreensão - Bhagwan Shree RajneeshDocument274 pagesTantra - A Suprema Compreensão - Bhagwan Shree RajneeshPedroFernandes100% (4)
- Lista de Formulas MCUVDocument2 pagesLista de Formulas MCUVRichardson GarciaNo ratings yet
- PDF Relatorio Estudo Do Momento de Inercia de Sistemas Discretos Pelo Metodo Cientifico - CompressDocument10 pagesPDF Relatorio Estudo Do Momento de Inercia de Sistemas Discretos Pelo Metodo Cientifico - CompressCarolina SquaiellaNo ratings yet
- q1 AssíncronaDocument2 pagesq1 AssíncronaClaudio JuniorNo ratings yet
- ROBOTICA 03 B Cinematica Direta MatlabDocument43 pagesROBOTICA 03 B Cinematica Direta MatlabRuan SantosNo ratings yet
- ROBOTICA 03 B Cinematica Direta MatlabDocument34 pagesROBOTICA 03 B Cinematica Direta MatlabJoão Gabriel Castilho HaineNo ratings yet
- Matlab - Robots Do Toolbox ProgramadosDocument6 pagesMatlab - Robots Do Toolbox ProgramadosAlysson DomingosNo ratings yet
- Aula 5 - SEM0317 - 2017Document84 pagesAula 5 - SEM0317 - 2017Rubens Eduardo MeloNo ratings yet
- Modelagem Matemática e ExperimentalDocument4 pagesModelagem Matemática e ExperimentalHugo FariasNo ratings yet
- Primeiro TrabalhoDocument4 pagesPrimeiro TrabalhoRobson DorivalNo ratings yet
- ROBOTICA 04 B Cinematica - Direta - MatlabDocument5 pagesROBOTICA 04 B Cinematica - Direta - Matlabedmilson_queirozNo ratings yet
- 03 Funcao DegrauDocument19 pages03 Funcao DegrauThiago DantasNo ratings yet
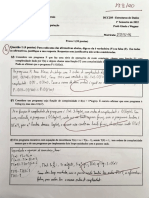
- Prova1 EDDocument5 pagesProva1 EDCleyton NobreNo ratings yet
- Lista 1Document10 pagesLista 1Davi JordãoNo ratings yet
- Cap3 LaplaceDocument32 pagesCap3 LaplaceGabriel MazzoniNo ratings yet
- Presentacion y Cap 1Document23 pagesPresentacion y Cap 1jvi alsNo ratings yet
- Aula 5 e 6 - Estabilidade de Sistemas de ControleDocument116 pagesAula 5 e 6 - Estabilidade de Sistemas de ControleJohny SilvaNo ratings yet
- Lista 1 MecânicaDocument10 pagesLista 1 MecânicaMatheus MagalhãesNo ratings yet
- Abcde ATUALIZADODocument8 pagesAbcde ATUALIZADOleandrofonte714No ratings yet
- ROBOTICA 05 B Velocidade e Aceleracao MatlabDocument27 pagesROBOTICA 05 B Velocidade e Aceleracao MatlabVitorino Biazi NetoNo ratings yet
- Exercicios 09Document5 pagesExercicios 09matheuslisarteNo ratings yet
- WORD - Diagrama de BodeDocument18 pagesWORD - Diagrama de BodeRomulo MondiniNo ratings yet
- INFORMÁTICADocument5 pagesINFORMÁTICAFernando FerreiraNo ratings yet
- Trabalho Cinematica Direta ManipuladoreDocument13 pagesTrabalho Cinematica Direta ManipuladoredinholimaaNo ratings yet
- Lista de Exercícios Aulas 4 e 5 6Document4 pagesLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiNo ratings yet
- Lab4 e 5 - Linguagem KRLDocument11 pagesLab4 e 5 - Linguagem KRLCicero Gonçalves67% (3)
- Álgebra Linear - Exercícios ResolvidosDocument17 pagesÁlgebra Linear - Exercícios ResolvidosFelipe André100% (2)
- Lab 02Document5 pagesLab 02kennyvinenteNo ratings yet
- 3 ModelosMatemáticos2023 2Document21 pages3 ModelosMatemáticos2023 2Felipe RicksonNo ratings yet
- Aula TeoremasDocument34 pagesAula TeoremasFabricio MacielNo ratings yet
- Comparação Gráfica Entre Métodos Numérico e Analítico Do Comportamento de Uma Barra Sob TensãoDocument12 pagesComparação Gráfica Entre Métodos Numérico e Analítico Do Comportamento de Uma Barra Sob TensãoMatheus SalesNo ratings yet
- Trab Do TrabDocument20 pagesTrab Do TrabPatrick RiquelmeNo ratings yet
- Módulo 6 - Transformada de Laplace Direta e InversaDocument35 pagesMódulo 6 - Transformada de Laplace Direta e Inversasolteirailudida2No ratings yet
- Apostila MCAEDocument78 pagesApostila MCAEDébora VitóriaNo ratings yet
- Aula 3 - ANAL - sist.LINEARES - Transformada de Laplace - Análise de SistemasDocument37 pagesAula 3 - ANAL - sist.LINEARES - Transformada de Laplace - Análise de SistemasMikael PaivaNo ratings yet
- Calculo Numérico MATLABDocument19 pagesCalculo Numérico MATLABRodrigo IscuissatiNo ratings yet
- 2-Geracao de Variaveis AleatoriasDocument26 pages2-Geracao de Variaveis AleatoriasVitor AnesNo ratings yet
- PROVA P1 - CET0160 - HIPER - 2016 - 1 - ResDocument25 pagesPROVA P1 - CET0160 - HIPER - 2016 - 1 - ResSebastião SimãoNo ratings yet
- Aula 4 Cinematica Parte1 2Document49 pagesAula 4 Cinematica Parte1 2gabymorais.coelhoNo ratings yet
- Teorema Espectral - Resumão Completo, Exercícios Passo A Passo e VideoaulasDocument10 pagesTeorema Espectral - Resumão Completo, Exercícios Passo A Passo e VideoaulastennysonbaumNo ratings yet
- Lista Métodos NuméricosDocument2 pagesLista Métodos NuméricosGabriel SoaresNo ratings yet
- Controle e Servomecanismos I Aula 11 01 2023Document10 pagesControle e Servomecanismos I Aula 11 01 2023Thiago de LimaNo ratings yet
- Tutorial: Uso Do Matlab/Octave para A Integração Numérica de Equações Diferenciais OrdináriasDocument13 pagesTutorial: Uso Do Matlab/Octave para A Integração Numérica de Equações Diferenciais OrdináriasEmerson Borges SantanaNo ratings yet
- Robotica Exercicio PDFDocument4 pagesRobotica Exercicio PDFgbezzonNo ratings yet
- Analise de SinaisDocument23 pagesAnalise de SinaisSandroNunes100% (1)
- Aula 21 2023 Circuitos 1a Ordem Versao Apos AulaDocument26 pagesAula 21 2023 Circuitos 1a Ordem Versao Apos AulaTassyla LimaNo ratings yet
- Cinematica Inversa 1GDLDocument11 pagesCinematica Inversa 1GDLJean YabarrenaNo ratings yet
- 3raProvaMAT137T12022 IIDocument5 pages3raProvaMAT137T12022 IIwalterhvNo ratings yet
- Praticas 2 ApostilaDocument10 pagesPraticas 2 ApostilaAntônio MouraNo ratings yet
- Simetria 2Document24 pagesSimetria 2Mariana MouraNo ratings yet
- Transmissão RespostasDocument25 pagesTransmissão RespostasAndre dos Anjos100% (1)
- Controle de Processos - Aula 2 - Versão 3Document26 pagesControle de Processos - Aula 2 - Versão 3Jean Sarmento FerrazNo ratings yet
- Relatório Final IC C. EduardoDocument6 pagesRelatório Final IC C. Eduardocarlos eduardo noletoNo ratings yet
- Azdoc - Tips Teoria Cap2 Parte4 2006Document5 pagesAzdoc - Tips Teoria Cap2 Parte4 2006luã bugayNo ratings yet
- Atv. Pratica Sinais e SistemasDocument33 pagesAtv. Pratica Sinais e Sistemaspvh6mwkyjtNo ratings yet
- Modelagem Matemática de Robôs Através de Transformações LinearesDocument9 pagesModelagem Matemática de Robôs Através de Transformações LinearesJulioNo ratings yet
- Modelos Matematicos ComplexidadeDocument11 pagesModelos Matematicos ComplexidadeCilene CamposNo ratings yet
- Lista 2 CalcNumerico EMec 201801Document2 pagesLista 2 CalcNumerico EMec 201801milena.alexandreNo ratings yet
- Tabela de PrimitivasDocument3 pagesTabela de PrimitivasRubenRoquesNo ratings yet
- 3 2 ln2 2x X 1: (2 Valores)Document2 pages3 2 ln2 2x X 1: (2 Valores)Nuno CordeiroNo ratings yet
- Perfil Disc1Document6 pagesPerfil Disc1rwurdigNo ratings yet
- Certificação Profissional ISO 27002 FoundationDocument32 pagesCertificação Profissional ISO 27002 FoundationrwurdigNo ratings yet
- C 4 FD 4 BDocument2 pagesC 4 FD 4 BrwurdigNo ratings yet
- Ebook Com Mais de 20 Linguagens de ProgramaçãoDocument1 pageEbook Com Mais de 20 Linguagens de Programaçãorwurdig100% (1)
- Comentários À: Lei Geral de Proteção de DadosDocument165 pagesComentários À: Lei Geral de Proteção de DadosMartinho BotelhoNo ratings yet
- Planejamento de Compras Na Construção Civil Baseado Na Curva AbcDocument8 pagesPlanejamento de Compras Na Construção Civil Baseado Na Curva AbcrwurdigNo ratings yet
- Samael Aun Weor - Tratado Esotérico de Astrologia HerméticaDocument63 pagesSamael Aun Weor - Tratado Esotérico de Astrologia HerméticaDaniela Cristina Sousa100% (1)
- RecruTest ExemploDocument3 pagesRecruTest ExemplorwurdigNo ratings yet
- E Book Numerologia Cabalistica A Essencia Dos NumerosDocument66 pagesE Book Numerologia Cabalistica A Essencia Dos NumerosCarmen Rodriguez Ruiz100% (1)
- Sugadores - PDF R+CDocument66 pagesSugadores - PDF R+CFERNANDANo ratings yet
- Planejamento de Compras Na Construção Civil Baseado Na Curva AbcDocument8 pagesPlanejamento de Compras Na Construção Civil Baseado Na Curva AbcrwurdigNo ratings yet
- Excel para EngenheirosDocument5 pagesExcel para EngenheirosSharley Monteiro0% (2)
- 7 Meditacoes ReikianasDocument9 pages7 Meditacoes ReikianasMarcosCardosoNo ratings yet
- Liberdade de Pensar e LiberdadeDocument43 pagesLiberdade de Pensar e LiberdaderwurdigNo ratings yet
- Teseliderancaena PDFDocument166 pagesTeseliderancaena PDFrwurdigNo ratings yet
- Reduzir OsDocument35 pagesReduzir OsrwurdigNo ratings yet
- Suprimentos Gestao de Compras Matriz Portfolio Kraljic Adriano Jacobina Filho PDFDocument67 pagesSuprimentos Gestao de Compras Matriz Portfolio Kraljic Adriano Jacobina Filho PDFrwurdigNo ratings yet
- Suprimentos Gestao de Compras Matriz Portfolio Kraljic Adriano Jacobina Filho PDFDocument67 pagesSuprimentos Gestao de Compras Matriz Portfolio Kraljic Adriano Jacobina Filho PDFrwurdigNo ratings yet
- Liberdade de Pensar e LiberdadeDocument43 pagesLiberdade de Pensar e LiberdaderwurdigNo ratings yet
- Parametrização Do InversorDocument2 pagesParametrização Do InversorrwurdigNo ratings yet
- Relatório Fundações RodrigoDocument15 pagesRelatório Fundações RodrigorwurdigNo ratings yet
- Ebook Indicadores Tempo RealDocument11 pagesEbook Indicadores Tempo RealArticuladora Engenharia e ConsultoriaNo ratings yet
- Reduzir OsDocument35 pagesReduzir OsrwurdigNo ratings yet
- João Nunes Maia (Lancellin) - Cirurgia Moral PDFDocument108 pagesJoão Nunes Maia (Lancellin) - Cirurgia Moral PDFluizhtd88% (8)
- Resumo 2507Document1 pageResumo 2507rwurdigNo ratings yet
- Esca DasDocument5 pagesEsca DasrwurdigNo ratings yet
- L100Document158 pagesL100Jeh CézarNo ratings yet
- Coletânea de Exercícios para Estudo. de p1Document6 pagesColetânea de Exercícios para Estudo. de p1GILMARFFNo ratings yet
- Retas e Angulos 5 Ano PDFDocument5 pagesRetas e Angulos 5 Ano PDFNando CorreiaNo ratings yet
- 3 - Transformacoes-Geometricas-3dDocument84 pages3 - Transformacoes-Geometricas-3dADILSON ANTÓNIO QUINGUANGUANo ratings yet
- ApostilaMCUV IDocument24 pagesApostilaMCUV IrareisNo ratings yet
- TABROTDocument4 pagesTABROTALEXANDRE F VOLTANo ratings yet
- Dinamica Do Corpo Rigido GABARITODocument35 pagesDinamica Do Corpo Rigido GABARITOPedro BispoNo ratings yet
- Notas de Aula 3-CinematicaDocument12 pagesNotas de Aula 3-CinematicaRezende JulioNo ratings yet
- ATIVIDADE 10.12.2020 Karollaynne 1 T02Document3 pagesATIVIDADE 10.12.2020 Karollaynne 1 T02Karollaynne Oliveira SantosNo ratings yet
- Física Atividade DiagnosticadaDocument48 pagesFísica Atividade DiagnosticadaJonathanNo ratings yet
- 3 Lista de Física 1 2023.1Document2 pages3 Lista de Física 1 2023.1Paulo AntunesNo ratings yet
- Física 1 - FL 06 - Movimento Circular Uniforme (MCU)Document6 pagesFísica 1 - FL 06 - Movimento Circular Uniforme (MCU)Lais GermanoNo ratings yet
- Isometrias PDFDocument8 pagesIsometrias PDFjlmreis100% (1)
- Aula 2 - Momento de Inércia e Teorema Dos Eixos ParalelosDocument53 pagesAula 2 - Momento de Inércia e Teorema Dos Eixos ParalelosOficina - Hidráulica Brasil - HB Departamento TécnicoNo ratings yet
- Movimento Circular - Amanda CarmoDocument15 pagesMovimento Circular - Amanda CarmoAmanda CarmoNo ratings yet
- Física Prep. Cap Iv.Document3 pagesFísica Prep. Cap Iv.Roberto CesurNo ratings yet
- GiroscópioDocument10 pagesGiroscópioLuanadutNo ratings yet
- Ficha IsometriasDocument7 pagesFicha IsometriasMarta SecoNo ratings yet
- Dinâmica Das Rotações (FÍSICA)Document12 pagesDinâmica Das Rotações (FÍSICA)Samuel100% (14)
- Cinemática e Dnâmica de RotaçãoDocument5 pagesCinemática e Dnâmica de RotaçãoKelaine de Almeida LimaNo ratings yet
- Energia Rotacional e Momento de InérciaDocument22 pagesEnergia Rotacional e Momento de InérciajairorochaNo ratings yet
- Aula 03 Ângulos Formados Por Retas Paralelas e Cortadas Por TransversaisDocument6 pagesAula 03 Ângulos Formados Por Retas Paralelas e Cortadas Por TransversaisSandro CarvalhoNo ratings yet
- Exercicios Topografia PlaniDocument6 pagesExercicios Topografia PlaniRYCHARDSON ROCHA DE ARAUJONo ratings yet
- Preliminares MatemáticosDocument26 pagesPreliminares MatemáticosLucas Cavalcante de AlmeidaNo ratings yet
- Relatório - Movimento Do GiroscópioDocument18 pagesRelatório - Movimento Do Giroscópioleticia riosNo ratings yet