You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Me PDFDocument553 pagesMe PDFSoma GhoshNo ratings yet
- 1GR Fe Motor PDFDocument5 pages1GR Fe Motor PDFMiguel Angel Capia TintaNo ratings yet
- Handbook 2 - Building Confirmatory InspectionDocument28 pagesHandbook 2 - Building Confirmatory Inspectionzaman musaNo ratings yet
- LPHX 55000 - FlowserveDocument12 pagesLPHX 55000 - FlowserveAldy Dankers100% (1)
- Company ProfileDocument10 pagesCompany Profilemajid aliNo ratings yet
- BP Miller Drilling ItemsDocument35 pagesBP Miller Drilling ItemsRiska AfrinaNo ratings yet
- Its All UphillDocument2 pagesIts All Uphillmelissa0% (1)
- Physical Chemistry-Problems and Solutions-1 - MiesslerDocument836 pagesPhysical Chemistry-Problems and Solutions-1 - MiesslerAKHILA MNo ratings yet
- Heat Treatment of Welded JointsDocument11 pagesHeat Treatment of Welded JointsMuhammed SulfeekNo ratings yet
- Physics I Problems PDFDocument1 pagePhysics I Problems PDFBOSS BOSSNo ratings yet
- Moment of InertiaDocument16 pagesMoment of InertiaDiane Dinglasa TobiasNo ratings yet
- Shear Connectors On Concrete-To-Concrete Interface Surfaces: A Numerical Investigation On 3D FramesDocument13 pagesShear Connectors On Concrete-To-Concrete Interface Surfaces: A Numerical Investigation On 3D FramesPedro SantosNo ratings yet
- Sealmaster MFC SeriesDocument1 pageSealmaster MFC SeriesCardoso MalacaoNo ratings yet
- Principles of Power GenerationDocument94 pagesPrinciples of Power Generationhafiz azman83% (6)
- Speed Control of DC MotorsDocument2 pagesSpeed Control of DC Motorsmsd183wkNo ratings yet
- SBS-417 Bunker PlanDocument2 pagesSBS-417 Bunker PlanalberioNo ratings yet
- (TDBFP-Hihi Vibraiton of Pump BearingDocument3 pages(TDBFP-Hihi Vibraiton of Pump BearingCharu ChhabraNo ratings yet
- Material Selection and Design For Delivery Drone PropellersDocument6 pagesMaterial Selection and Design For Delivery Drone PropellersRicardo DíazNo ratings yet
- WKB ApproximationDocument14 pagesWKB Approximationamitsk144No ratings yet
- Alamillo Bridge Seville PDFDocument10 pagesAlamillo Bridge Seville PDFManasviNo ratings yet
- Fundamentals of Water System Design - SIDocument281 pagesFundamentals of Water System Design - SItran duy100% (2)
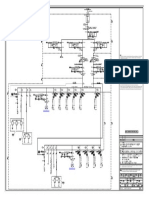
- Electrical SLDDocument1 pageElectrical SLDsusovan bIswasNo ratings yet
- Gravity As A Form of AccelerationDocument8 pagesGravity As A Form of AccelerationJ_BellineNo ratings yet
- Oxygen Sensor Certification ManualDocument20 pagesOxygen Sensor Certification ManualSR BangashNo ratings yet
- Climaveneta CVM 20 ManualDocument20 pagesClimaveneta CVM 20 ManualisaNo ratings yet
- KKS (Main Group)Document82 pagesKKS (Main Group)Heri AngriawanNo ratings yet
- Lecture Notes - Forging CalculationDocument21 pagesLecture Notes - Forging CalculationFabiano, Jr. BarcenalNo ratings yet
- List of Recomended ManufacturersDocument16 pagesList of Recomended ManufacturersMostafa SalemNo ratings yet
- Retrofitting of Reinforced Concrete BuildingsDocument44 pagesRetrofitting of Reinforced Concrete BuildingsKrupakl Gowda100% (8)
- T1 V1 F10 I1 F11 C1 F9 I2 W1 I3 W2: Position of Parts in Engine CompartmentDocument5 pagesT1 V1 F10 I1 F11 C1 F9 I2 W1 I3 W2: Position of Parts in Engine CompartmentAlha Ega AnadaNo ratings yet