You might also like
- Electrocardiografo CardiovitDocument4 pagesElectrocardiografo CardiovitFernando Fer GazabonNo ratings yet
- Electronica Aplicada A La Medicina Elect PDFDocument4 pagesElectronica Aplicada A La Medicina Elect PDFRodrigoNo ratings yet
- Que Es Un PLCDocument7 pagesQue Es Un PLCValdéz Gutiérrez Sharon IsabelNo ratings yet
- 2 Departamento de ElectromedicinaDocument49 pages2 Departamento de ElectromedicinaErika Jerez VegaraNo ratings yet
- Ingeniería clínica: conceptos, áreas e ingeniero clínicoDocument19 pagesIngeniería clínica: conceptos, áreas e ingeniero clínicodrarudyruizNo ratings yet
- Terminología RadiológicaDocument22 pagesTerminología RadiológicaMaria Monroy100% (1)
- Pruebas seguridad eléctrica monitorDocument7 pagesPruebas seguridad eléctrica monitorConstanza VásquezNo ratings yet
- ECG Arduino CardiacoDocument108 pagesECG Arduino CardiacobprzNo ratings yet
- Lifepak20 DatasheetDocument4 pagesLifepak20 DatasheetMario Alberto RuggieroNo ratings yet
- Ingeniería Clínica para No IngenierosDocument8 pagesIngeniería Clínica para No IngenierosalejandraNo ratings yet
- Desfibrilador D3 ESDocument2 pagesDesfibrilador D3 ESDT MEDICAL S.A.SNo ratings yet
- Prototipo Ventilador MecánicoDocument4 pagesPrototipo Ventilador MecánicoedielekNo ratings yet
- Indicador para Sustitución de Equipo MédicoDocument4 pagesIndicador para Sustitución de Equipo MédicoJuan AlemánNo ratings yet
- Diseño de electrobisturi UNERDocument4 pagesDiseño de electrobisturi UNERJose CastilloNo ratings yet
- Capitul Ii Gestion Mantenimiento Parte I EstudiantesDocument44 pagesCapitul Ii Gestion Mantenimiento Parte I Estudiantesmarlon francoNo ratings yet
- Ecografo TDocument10 pagesEcografo TIsamar MarrufoNo ratings yet
- 7 - Gestión de MantenimientoDocument34 pages7 - Gestión de MantenimientoPaz MarcelyNo ratings yet
- ProyectoDocument3 pagesProyectoHugo Bryan HerreraNo ratings yet
- ELECTROTECNIA TemarioDocument10 pagesELECTROTECNIA TemarioAide MatuteNo ratings yet
- Electro BisturiDocument36 pagesElectro Bisturimacbet92No ratings yet
- Capitulo 14 Apnb 777Document40 pagesCapitulo 14 Apnb 777Omar Rodriguez100% (1)
- X Control ExpertoDocument18 pagesX Control ExpertoSebastian Andres Olavarria AntiveroNo ratings yet
- Ensayo de Equipos MedicosDocument11 pagesEnsayo de Equipos MedicosEdgardoJesusQuinteroAponteNo ratings yet
- Informe Final InstrumentaciónDocument7 pagesInforme Final InstrumentaciónlinmimayNo ratings yet
- 05 El Electrocardiograma NormalDocument10 pages05 El Electrocardiograma NormalJulietaS.LopezNanniniNo ratings yet
- Ingenieria BiomédicaDocument9 pagesIngenieria BiomédicaValentina BarrosoNo ratings yet
- Oxigenoterapia: dispositivos y mecanismosDocument63 pagesOxigenoterapia: dispositivos y mecanismosAlan Llontop100% (1)
- 02 Rim - Funcionamiento de La Mamografia PDFDocument19 pages02 Rim - Funcionamiento de La Mamografia PDFLaura Elizabeth RodriguezNo ratings yet
- Electrocardiografo Edan de 1 CanalDocument4 pagesElectrocardiografo Edan de 1 CanalElizabeth Porras ArevaloNo ratings yet
- Cap I Introduccion Funciones de La Ing ClinicaDocument62 pagesCap I Introduccion Funciones de La Ing ClinicaRoger Challco ChalcoNo ratings yet
- Ingeniería biomédica interdisciplinaria en UruguayDocument14 pagesIngeniería biomédica interdisciplinaria en UruguayRaul Keyar Ferrel AlfaroNo ratings yet
- Unidad3 Fase3 299016 8Document84 pagesUnidad3 Fase3 299016 8Andrea10820% (1)
- PósterFinal en PDFDocument1 pagePósterFinal en PDFJosué Albornoz LaferraraNo ratings yet
- ELECTROBISTURIDocument30 pagesELECTROBISTURIrjacomepNo ratings yet
- EMC Electromedicos MORUGA COPITEC Biomedica (Jul12)Document168 pagesEMC Electromedicos MORUGA COPITEC Biomedica (Jul12)Gabriel Moruga100% (1)
- Dosimetría RadiofármacosDocument9 pagesDosimetría RadiofármacosJeltsin Chávarry AratíaNo ratings yet
- Conferencia sobre Electromedicina y Mantenimiento de Equipos MédicosDocument14 pagesConferencia sobre Electromedicina y Mantenimiento de Equipos MédicosJesus Rafael SolorzanoNo ratings yet
- Sistema de Control para Ventilador MecánicoDocument4 pagesSistema de Control para Ventilador MecánicoBárbara PizáNo ratings yet
- Leyes de OHM y WATT en circuitos eléctricosDocument19 pagesLeyes de OHM y WATT en circuitos eléctricossevernaya82No ratings yet
- Parámetros Del Respirador A Programar PDFDocument7 pagesParámetros Del Respirador A Programar PDFConstanza LeporiNo ratings yet
- RM504-2011-MINSA GT para El Mantenimiento Preventivo Del Capnografo.Document18 pagesRM504-2011-MINSA GT para El Mantenimiento Preventivo Del Capnografo.FernandoNo ratings yet
- ECG PoliDocument159 pagesECG PoliJhonNo ratings yet
- Equipo terapia física TENSDocument14 pagesEquipo terapia física TENSJonathan RodriguezNo ratings yet
- Lab 1: Metrology FundamentalsDocument42 pagesLab 1: Metrology FundamentalsrubenkolosovasNo ratings yet
- Equipos de Aislamiento en Una Sub-EstaciDocument54 pagesEquipos de Aislamiento en Una Sub-EstaciRaicoNo ratings yet
- Especificaciones TecnicasDocument14 pagesEspecificaciones Tecnicasjuan antonioNo ratings yet
- Dosimetria Biologica - Salazar - AmesquitaDocument70 pagesDosimetria Biologica - Salazar - AmesquitaAlejandra Ayulo CumpalliNo ratings yet
- MANDO-24-00 Manual de Usuario Monitor de Signos Vitales SVP V00 BIENDocument358 pagesMANDO-24-00 Manual de Usuario Monitor de Signos Vitales SVP V00 BIENpantaloncitosNo ratings yet
- Mantenimiento preventivo RM genera error tras revisión de empaque de helioDocument5 pagesMantenimiento preventivo RM genera error tras revisión de empaque de helioJacqueline Cristina Vega Gastelum100% (1)
- Programa de Montaje de Proyectos Electronicos IDocument1 pagePrograma de Montaje de Proyectos Electronicos IjhamsarNo ratings yet
- Presentación Protocolo ARCA.LDocument40 pagesPresentación Protocolo ARCA.Lpguardio100% (3)
- DesfribiladorDocument6 pagesDesfribiladorJackson G.100% (1)
- Control de dispositivos de potencia mediante transistores y configuración DarlingtonDocument4 pagesControl de dispositivos de potencia mediante transistores y configuración DarlingtonHectorl02No ratings yet
- ECG FiltrosDocument8 pagesECG Filtrosmiguelonchas459No ratings yet
- MallaDocument1 pageMallaVladimir H. ChambiNo ratings yet
- 4ATipos de Tranductores Biomédicos MariredDocument224 pages4ATipos de Tranductores Biomédicos MariredJessica Cristina Mendoza MorenoNo ratings yet
- Tu Gran IdeaDocument32 pagesTu Gran IdeaElizaNo ratings yet
- Chipugsi Anthony - Fundamentos Basicos de InstrumentacionDocument16 pagesChipugsi Anthony - Fundamentos Basicos de InstrumentacionjuanNo ratings yet
- Sensores electroquímicos: Teoría y aplicacionesFrom EverandSensores electroquímicos: Teoría y aplicacionesNo ratings yet
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasFrom EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasRating: 5 out of 5 stars5/5 (1)
- Heart Dan Davis 2021 - MéxicoDocument1 pageHeart Dan Davis 2021 - MéxicoJocelyn UrquizaNo ratings yet
- Prueba COVID-19 negativaDocument1 pagePrueba COVID-19 negativaJocelyn UrquizaNo ratings yet
- Rulfo Juan - Pedazo de Noche - 1959-LibreDocument14 pagesRulfo Juan - Pedazo de Noche - 1959-LibreThrillerbarkingNo ratings yet
- Nom016ssa3 2012Document73 pagesNom016ssa3 2012Noemí Rosales ChairesNo ratings yet
- URINARIODocument37 pagesURINARIOjecamorales5975No ratings yet
- Sistemas DicomDocument2 pagesSistemas DicomJocelyn UrquizaNo ratings yet
- Brochure 2da Edición Health Data Science ProgrDocument31 pagesBrochure 2da Edición Health Data Science ProgrJocelyn UrquizaNo ratings yet
- Guia de Procedimientos para Un Centro de Igeniería BiomedicaDocument83 pagesGuia de Procedimientos para Un Centro de Igeniería BiomedicaRed PradoNo ratings yet
- Brochure 2da Edición Health Data Science ProgrDocument31 pagesBrochure 2da Edición Health Data Science ProgrJocelyn UrquizaNo ratings yet
- CDNEM DVEM IB Gto PDFDocument36 pagesCDNEM DVEM IB Gto PDFJocelyn UrquizaNo ratings yet
- GEM Estrategias Retos IB GtoDocument16 pagesGEM Estrategias Retos IB Gtovicente_ortiz_007No ratings yet
- Plan Dee Studios de Ingenieria BiomedicaDocument1 pagePlan Dee Studios de Ingenieria BiomedicaCristina NiñoNo ratings yet
- Covid19 ManualDocument68 pagesCovid19 ManualPaul Suarez MaldonadoNo ratings yet
- Formato para revalidación de calificaciones de laboratorioDocument11 pagesFormato para revalidación de calificaciones de laboratorioJocelyn UrquizaNo ratings yet
- Lic Promocion y Educacion para La Salud PDFDocument1 pageLic Promocion y Educacion para La Salud PDFRolyat WillNo ratings yet
- Tipos de electrodos para mediciones fisiológicasDocument233 pagesTipos de electrodos para mediciones fisiológicasJocelyn Urquiza0% (1)
- Programa Completo - EUIB PDFDocument4 pagesPrograma Completo - EUIB PDFJocelyn UrquizaNo ratings yet
- TelemetriaDocument2 pagesTelemetriaJocelyn UrquizaNo ratings yet
- Carrera Criminología CriminalísticaDocument2 pagesCarrera Criminología CriminalísticaJocelyn UrquizaNo ratings yet
- Guía para Crear Un Mapa ConceptualDocument3 pagesGuía para Crear Un Mapa Conceptualenkil17No ratings yet
- Telecomunicaciones PDFDocument65 pagesTelecomunicaciones PDFIsmael ChoixNo ratings yet
- Monitorización cardiaca remotaDocument26 pagesMonitorización cardiaca remotaericNo ratings yet
- ImágenesDocument18 pagesImágenesJocelyn UrquizaNo ratings yet
- V11n21a05 PDFDocument7 pagesV11n21a05 PDFJocelyn UrquizaNo ratings yet
- El Histograma Una Imagen DigitalDocument9 pagesEl Histograma Una Imagen DigitalAlicia BenitezNo ratings yet
- Comparador Con Histéresis - EcuacionesDocument2 pagesComparador Con Histéresis - EcuacionesPEdro CarvajalNo ratings yet
- PlanEstudiosTecLabCli PDFDocument10 pagesPlanEstudiosTecLabCli PDFJocelyn UrquizaNo ratings yet
- El Proceso Negativo PositivoDocument42 pagesEl Proceso Negativo PositivoLaura BaNo ratings yet
- Comparador Con Histéresis - EcuacionesDocument1 pageComparador Con Histéresis - EcuacionesJocelyn UrquizaNo ratings yet
- AlarmasyvoceoDocument6 pagesAlarmasyvoceoJocelyn UrquizaNo ratings yet
- OSMOSIS-practica 1 - Fisiología IDocument54 pagesOSMOSIS-practica 1 - Fisiología IMariGuedezGu100% (1)
- Imagenología de AbdomenDocument116 pagesImagenología de Abdomenmike_htrNo ratings yet
- 3ensayo CC Vs CODocument6 pages3ensayo CC Vs COOlaff Saavedra AyalaNo ratings yet
- Reporte Del Acondicionamiento de La Señal Del ECGDocument7 pagesReporte Del Acondicionamiento de La Señal Del ECGSergio De J. GómezNo ratings yet
- Tratamiento de Ortodoncia en Paciente Con Síndrome de Moebius. Informe de CasoDocument3 pagesTratamiento de Ortodoncia en Paciente Con Síndrome de Moebius. Informe de CasoANo ratings yet
- Quemaduras Manejo Inicial.Document10 pagesQuemaduras Manejo Inicial.Jimena Lucila Del Carmen Granada NuñezNo ratings yet
- SemillaDocument52 pagesSemillaElianne BalsecaNo ratings yet
- 2013 REMCB V34 No1 No2 PDFDocument230 pages2013 REMCB V34 No1 No2 PDFGaby Obando MorenoNo ratings yet
- Centella AsiáticaDocument10 pagesCentella AsiáticaQ Susana Hurtado CuevasNo ratings yet
- MeristemosDocument4 pagesMeristemosAndreaForteRuizNo ratings yet
- Presentacion Erupcion Dental MeDocument35 pagesPresentacion Erupcion Dental MeNaguin vNo ratings yet
- MORFOLOGÍA Y FUNCIONES DEL CEREBELODocument2 pagesMORFOLOGÍA Y FUNCIONES DEL CEREBELORafa ReloNo ratings yet
- Preguntas Cráneo IIDocument5 pagesPreguntas Cráneo IIMedFriends Medicina no ParaguaiNo ratings yet
- El Territorio de La BestiaDocument6 pagesEl Territorio de La BestiaAbril ReyesNo ratings yet
- John NeedhamDocument5 pagesJohn Needhamgiulis96No ratings yet
- Manual N°1 Historia, CTV y MicropropagacionDocument10 pagesManual N°1 Historia, CTV y MicropropagacionJuan Carlos TorresNo ratings yet
- Hade Caso ClinicoDocument20 pagesHade Caso ClinicoFabian DinaresNo ratings yet
- Tema 4 LípidosDocument15 pagesTema 4 LípidosYouNo ratings yet
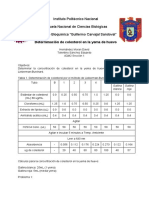
- Determinación de Colesterol en La Yema de HuevoDocument3 pagesDeterminación de Colesterol en La Yema de HuevoNataliaNo ratings yet
- Guia de Estudio PediatriaDocument8 pagesGuia de Estudio PediatriaAbraham Rivas MiguelNo ratings yet
- Manual de bloqueos simpáticos del Dr. AlbaneseDocument94 pagesManual de bloqueos simpáticos del Dr. AlbaneseYael Melisa Pereyra100% (1)
- ArdsDocument38 pagesArdsKevin GarayNo ratings yet
- Concepto de Reactivo LimitanteDocument3 pagesConcepto de Reactivo LimitanteChristian Martin Franco AcostaNo ratings yet
- Tarea 4 - Bases Biológicas Del Comportamiento - DDocument9 pagesTarea 4 - Bases Biológicas Del Comportamiento - DGUSTAVO SANCHEZ CERVANTESNo ratings yet
- Circulación CerebralDocument12 pagesCirculación CerebralMARIA FERNANDA QUIROZ DELGADONo ratings yet
- 246origen e Hibridacion de MusaceasDocument9 pages246origen e Hibridacion de MusaceasKelly ZambranoNo ratings yet
- Judo Cuardenillo de IniciacionDocument55 pagesJudo Cuardenillo de IniciacionClaudio Peña DiazNo ratings yet
- Posiciones de Los Pacientes EncamadosDocument29 pagesPosiciones de Los Pacientes EncamadosVictor Avila Acuña100% (3)
- ADN Re Power PointDocument33 pagesADN Re Power PointalbamvasquezjNo ratings yet
- Experimento - GlobosDocument7 pagesExperimento - GlobosluzNo ratings yet