You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Floor PropsDocument5 pagesFloor Propsidesawy1982No ratings yet
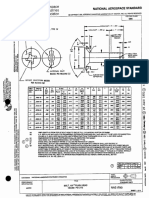
- Nas 1790Document4 pagesNas 1790Sagar PawarNo ratings yet
- BN - 20038 Hexalobular Socket Pan Head Machine Screws Fully Threaded (A4)Document3 pagesBN - 20038 Hexalobular Socket Pan Head Machine Screws Fully Threaded (A4)MSD ENGRNo ratings yet
- Programe FanucDocument47 pagesPrograme Fanucbranet_adrianaNo ratings yet
- Vedanta Limited Integrated Field Plan Inspection ReportsDocument23 pagesVedanta Limited Integrated Field Plan Inspection ReportsPRAKASH PANDEYNo ratings yet
- Filter Parts List for MGS2884 A6 Air FilterDocument3 pagesFilter Parts List for MGS2884 A6 Air FilterServicios y Repuestos Jeremy Azhael 2320 C.ANo ratings yet
- The Car Tools Vocabulary (I)Document6 pagesThe Car Tools Vocabulary (I)Abdi AvalosNo ratings yet
- Standard VCS 5511,: Volvo Car CorporationDocument35 pagesStandard VCS 5511,: Volvo Car CorporationRapegaNo ratings yet
- Superbolt CAT 2006Document32 pagesSuperbolt CAT 2006oner erdeveNo ratings yet
- Torques LH517iDocument1 pageTorques LH517iJohnatan MezaNo ratings yet
- Gagemaker Catalog 2020Document156 pagesGagemaker Catalog 2020Ronald RaphelNo ratings yet
- BMI-IncDocument4 pagesBMI-IncMuhammed ShoaibNo ratings yet
- Wrench ClearancesDocument2 pagesWrench ClearancesRowan JoguilonNo ratings yet
- Thread DataDocument13 pagesThread DataajujkNo ratings yet
- A List of Standards Required For Designing Bolted JointsDocument2 pagesA List of Standards Required For Designing Bolted JointsMladenMarkovicNo ratings yet
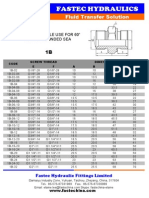
- Fastec Pipe Fittings Iso Standard FOR SAAB SCANIADocument18 pagesFastec Pipe Fittings Iso Standard FOR SAAB SCANIALakshitha Dx AmalNo ratings yet
- BS Au 264-1995 (1999) Iso - 2345-1994 PDFDocument10 pagesBS Au 264-1995 (1999) Iso - 2345-1994 PDFamerNo ratings yet
- ASME B18.2.6 2010 (1) - Fasteners For Use in Structural Applications-11-14Document4 pagesASME B18.2.6 2010 (1) - Fasteners For Use in Structural Applications-11-14Andres SilveyraNo ratings yet
- FanucDocument177 pagesFanucmadalina_geo75% (8)
- Rosalijos, Reyman M. Bet-Mt2 Assignment #5Document6 pagesRosalijos, Reyman M. Bet-Mt2 Assignment #5reyman rosalijosNo ratings yet
- Torque SpecificationsDocument1 pageTorque SpecificationsMahmoud HanafyNo ratings yet
- Control Panel CAT C15 FFHDocument3 pagesControl Panel CAT C15 FFHGamal El Deen KamalNo ratings yet
- Research of Thread Rolling on Difficult MaterialsDocument5 pagesResearch of Thread Rolling on Difficult MaterialsSuhel suhel khanNo ratings yet
- Lo Nuevo de Herramientas VARGUSDocument336 pagesLo Nuevo de Herramientas VARGUSAnonymous D5QForitcNo ratings yet
- Production Time: Operator Name-Dharmendra GuptaDocument16 pagesProduction Time: Operator Name-Dharmendra GuptaProduction HeicoNo ratings yet
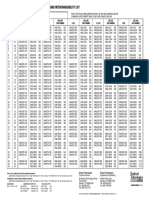
- Helicoil Metric Insert Aerospace Standard InterchangeabilityDocument2 pagesHelicoil Metric Insert Aerospace Standard InterchangeabilityshadiNo ratings yet
- Type Major Diameter Pitch Depth of Thread Bolt Nut Bolt Nut 46mm 46mm: 46.5mm 38mm 8mm 4mm:4.25mm Nominal Diameter Minor Diameter Normal SeriesDocument1 pageType Major Diameter Pitch Depth of Thread Bolt Nut Bolt Nut 46mm 46mm: 46.5mm 38mm 8mm 4mm:4.25mm Nominal Diameter Minor Diameter Normal SeriesKish Shan S SubediNo ratings yet
- Tools Install PDFDocument20 pagesTools Install PDFmfj79607555No ratings yet
- External ISO Metric Trapezoidal Screw Threads Table Chart Sizes TR320 - TR1120 - Engineers EdgeDocument4 pagesExternal ISO Metric Trapezoidal Screw Threads Table Chart Sizes TR320 - TR1120 - Engineers EdgeDiaconu Vlad CatalinNo ratings yet
- Inch Thread (UNC)Document3 pagesInch Thread (UNC)BharatNo ratings yet