You might also like
- Country Manager Report - Marketing Strategy Simulation Sample ReportDocument13 pagesCountry Manager Report - Marketing Strategy Simulation Sample ReportshaunisraddNo ratings yet
- Appendix GDocument4 pagesAppendix GSuresh PANo ratings yet
- Elsevier 360 Edge For Nursing Proposal - EVCCDocument13 pagesElsevier 360 Edge For Nursing Proposal - EVCCLEONARD CABALUNANo ratings yet
- Hybrid machine learning predicts energy consumptionDocument8 pagesHybrid machine learning predicts energy consumptionproject finishNo ratings yet
- Machine Learning For Wind Energy Analysis and ForecastingDocument9 pagesMachine Learning For Wind Energy Analysis and ForecastingIJRASETPublicationsNo ratings yet
- A New Study For Hybrid PV Wind Off Grid Power Generation Systems With The Comparison of Results From HomerDocument18 pagesA New Study For Hybrid PV Wind Off Grid Power Generation Systems With The Comparison of Results From Homeranupama jakkaNo ratings yet
- Management of An Island and Grid Connected Microgrid Using Hybr 2020 AppliedDocument20 pagesManagement of An Island and Grid Connected Microgrid Using Hybr 2020 AppliedThomas EldhoNo ratings yet
- 2019 - Optimal Operation of Microgrid Considering Renewable Energy Sources Electric Vehicles and Demand RDocument6 pages2019 - Optimal Operation of Microgrid Considering Renewable Energy Sources Electric Vehicles and Demand RBenjamin Angel Flores ZavalaNo ratings yet
- Mathematics 10 00140 v2Document25 pagesMathematics 10 00140 v2Ali TariqNo ratings yet
- sustainability-15-13499 مهم هيبردDocument23 pagessustainability-15-13499 مهم هيبردAmer AlmansoryNo ratings yet
- DL2F A Deep Learning Model For The Local Forecasting of Renewable SourcesDocument16 pagesDL2F A Deep Learning Model For The Local Forecasting of Renewable SourcesHoussem LoucheneNo ratings yet
- Automated Deep CNN-LSTM Architecture Design For Solar Irradiance ForecastingDocument12 pagesAutomated Deep CNN-LSTM Architecture Design For Solar Irradiance Forecastingoctober87No ratings yet
- Modeling of A Microgrid S Power Generation Cost Func 2019 Simulation ModelliDocument16 pagesModeling of A Microgrid S Power Generation Cost Func 2019 Simulation ModelliMouktikaNo ratings yet
- Energy: Ting-Chia Ou, Chih-Ming HongDocument10 pagesEnergy: Ting-Chia Ou, Chih-Ming HongtabendaaarzuNo ratings yet
- Towards Efficient Energy Management in Smart Grids Considering Microgrids With Day-Ahead Energy ForecastingDocument11 pagesTowards Efficient Energy Management in Smart Grids Considering Microgrids With Day-Ahead Energy ForecastingYahaya FatawuNo ratings yet
- Energy: G.R. Aghajani, H.A. Shayanfar, H. ShayeghiDocument16 pagesEnergy: G.R. Aghajani, H.A. Shayanfar, H. ShayeghiKiranNo ratings yet
- ManuscriptDocument21 pagesManuscriptashish.958sharmaNo ratings yet
- A Novel Combined Forecasting Model For Short-Term Wind Power Based On Ensemble Empirical Mode Decomposition and Optimal Virtual PredictionDocument23 pagesA Novel Combined Forecasting Model For Short-Term Wind Power Based On Ensemble Empirical Mode Decomposition and Optimal Virtual PredictionEvaNo ratings yet
- Multi-Objective Energy Storage Power Dispatching Using Plug-In Vehicles in A Smart-MicrogridDocument13 pagesMulti-Objective Energy Storage Power Dispatching Using Plug-In Vehicles in A Smart-MicrogridGuilherme WeisNo ratings yet
- Modeling and simulation of photovoltaic systems and responsive loads in smart gridDocument9 pagesModeling and simulation of photovoltaic systems and responsive loads in smart gridAristide ShalomNo ratings yet
- Group7 Diskrit EsaimenDocument12 pagesGroup7 Diskrit EsaimenFarhan ZahidiNo ratings yet
- 1 s2.0 S0378779623002730 MainDocument12 pages1 s2.0 S0378779623002730 Maintonmoy hossainNo ratings yet
- Planning Operation and Protection of Microgrids An Overview Faizal MumtazDocument7 pagesPlanning Operation and Protection of Microgrids An Overview Faizal MumtazPrisila DinantiNo ratings yet
- Modeling and Simulation of Hybrid Solar-Wind Energy System Using MPPT AlgorithmDocument13 pagesModeling and Simulation of Hybrid Solar-Wind Energy System Using MPPT Algorithmmohammed.abdullaNo ratings yet
- Computer Communications: Markus Mäsker, Lars Nagel, André Brinkmann, Foad Lotfifar, Matthew JohnsonDocument13 pagesComputer Communications: Markus Mäsker, Lars Nagel, André Brinkmann, Foad Lotfifar, Matthew JohnsonmyrgeteNo ratings yet
- Electronics 10 00403Document22 pagesElectronics 10 00403samirdawoudsamirdawoudNo ratings yet
- 1 s2.0 S0378779623002766 MainDocument10 pages1 s2.0 S0378779623002766 Maintonmoy hossainNo ratings yet
- 1 s2.0 S2352484722027536 MainDocument12 pages1 s2.0 S2352484722027536 MainBELGHITI HAMIDNo ratings yet
- s41601 023 00308 8 - 2Document14 pagess41601 023 00308 8 - 2ndaryanto 92No ratings yet
- Conference DARE2017 Quantile PDFDocument11 pagesConference DARE2017 Quantile PDFLory MarcNo ratings yet
- Economic, Environmental Analysis of Remote PV-Diesel Hybrid SystemsDocument9 pagesEconomic, Environmental Analysis of Remote PV-Diesel Hybrid SystemsSally OsmanNo ratings yet
- 1 s2.0 S2352484720301268 MainDocument13 pages1 s2.0 S2352484720301268 MainWildan AttariqNo ratings yet
- 10.-Multifactor Spatio-Temporal Correlation Model Based On A Combinationchen LSTM - CNN2019Document17 pages10.-Multifactor Spatio-Temporal Correlation Model Based On A Combinationchen LSTM - CNN2019Rony Arturo Bocangel SalasNo ratings yet
- Thirunavukkarasu 2020 IOP Conf. Ser. Mater. Sci. Eng. 937 012034Document11 pagesThirunavukkarasu 2020 IOP Conf. Ser. Mater. Sci. Eng. 937 012034PankajVermaNo ratings yet
- Data Driven Prediction Models of Photovoltaic Energy For Sma 2023 Energy RepDocument16 pagesData Driven Prediction Models of Photovoltaic Energy For Sma 2023 Energy RepbeyaNo ratings yet
- Optimal Coordination of Overcurrent Relays in Microgrids Considering a Non-Standard CharacteristicDocument18 pagesOptimal Coordination of Overcurrent Relays in Microgrids Considering a Non-Standard CharacteristicReda DjatouNo ratings yet
- Wind Power Forecasting Review for Renewable Energy Grid IntegrationDocument6 pagesWind Power Forecasting Review for Renewable Energy Grid IntegrationRajendra Prasad SanapalaNo ratings yet
- Ensemble Models For Solar Power Forecasting-A Weather Classification ApproachDocument20 pagesEnsemble Models For Solar Power Forecasting-A Weather Classification ApproachMina Youssef HalimNo ratings yet
- Optimal Protection Relay Placement in Microgrids - 2020Document6 pagesOptimal Protection Relay Placement in Microgrids - 2020khanh khanhNo ratings yet
- Adaptive ANN models for online building energy predictionDocument10 pagesAdaptive ANN models for online building energy predictionHoang QuanNo ratings yet
- Robust Control For Microgrid Frequency Deviation Reduction With Attached Storage SystemDocument9 pagesRobust Control For Microgrid Frequency Deviation Reduction With Attached Storage SystemHoàngNguyễnNo ratings yet
- A Methodology For Analysis of Impacts of Grid Integration of Renewable Energy, 2011Document12 pagesA Methodology For Analysis of Impacts of Grid Integration of Renewable Energy, 2011quebacanaNo ratings yet
- On Mitigating Wind Energy Variability With Storage: Vijay Arya, Partha Dutta, Shivkumar KalyanaramanDocument9 pagesOn Mitigating Wind Energy Variability With Storage: Vijay Arya, Partha Dutta, Shivkumar KalyanaramanAhmed WestministerNo ratings yet
- Full TextDocument14 pagesFull Textamruth00_210774197No ratings yet
- Measurement: Massimo Lazzaroni, Stefano Ferrari, Vincenzo Piuri, Aysße Salman, Loredana Cristaldi, Marco FaiferDocument18 pagesMeasurement: Massimo Lazzaroni, Stefano Ferrari, Vincenzo Piuri, Aysße Salman, Loredana Cristaldi, Marco FaiferYatheesh KaggereNo ratings yet
- Koltsaklis2017 PDFDocument43 pagesKoltsaklis2017 PDFMani MaranNo ratings yet
- Operation Planning of A Smart Microgrid Including Controllable Loads and Intermittent Energy Resources by Considering UncertaintiesDocument19 pagesOperation Planning of A Smart Microgrid Including Controllable Loads and Intermittent Energy Resources by Considering UncertaintieskesavantNo ratings yet
- ALKANDARI Predicción de EnergiaDocument20 pagesALKANDARI Predicción de EnergiaFERNANDO GUSTAVO LINDO PASCUALNo ratings yet
- Research ArticleDocument13 pagesResearch ArticlegiovanaNo ratings yet
- 1 s2.0 S0360544223024283 MainDocument13 pages1 s2.0 S0360544223024283 MainRachid BendaoudNo ratings yet
- Probabilistic Optimal Reactive Power Planning in Distribution Systems With Renewable Resources in Grid-Connected and Islanded ModesDocument10 pagesProbabilistic Optimal Reactive Power Planning in Distribution Systems With Renewable Resources in Grid-Connected and Islanded ModesMahshid JanbozorgiNo ratings yet
- Optimized Planning For Hybrid Microgrid in Grid-Connected ModeDocument10 pagesOptimized Planning For Hybrid Microgrid in Grid-Connected Modesimth parkerNo ratings yet
- Energies: Machine Learning Based Photovoltaics (PV) Power Prediction Using Di Parameters of QatarDocument19 pagesEnergies: Machine Learning Based Photovoltaics (PV) Power Prediction Using Di Parameters of QatarhouriaNo ratings yet
- Modeling and Control Strategy of A Hybrid PV/Wind/Engine/Battery System To Provide Electricity and Drinkable Water For RemoteDocument10 pagesModeling and Control Strategy of A Hybrid PV/Wind/Engine/Battery System To Provide Electricity and Drinkable Water For RemoteMahar Nadir AliNo ratings yet
- Hybrid Microgrid Model Based On Solar Photovoltaic Battery Fuel Cell System For Intermittent Load ApplicationsDocument8 pagesHybrid Microgrid Model Based On Solar Photovoltaic Battery Fuel Cell System For Intermittent Load ApplicationstaradataNo ratings yet
- Applsci 09 04710 Mdpi 3Document2 pagesApplsci 09 04710 Mdpi 3Washington Prieto CorreaNo ratings yet
- Renewable Energy: Xueqian Fu, Xiurong ZhangDocument9 pagesRenewable Energy: Xueqian Fu, Xiurong ZhangYousif KirkukeNo ratings yet
- Optimize Solar Power with Temperature TrackingDocument5 pagesOptimize Solar Power with Temperature TrackingSurangaGNo ratings yet
- Machine Learning Dynamic Ensemble Methods For SolaDocument24 pagesMachine Learning Dynamic Ensemble Methods For SolaDiego VidalNo ratings yet
- Load Frequency Control of Multi-Microgrid System Considering Renewable Energy Sources Using Grey Wolf OptimizationDocument21 pagesLoad Frequency Control of Multi-Microgrid System Considering Renewable Energy Sources Using Grey Wolf Optimizationsuresh_velamuriNo ratings yet
- Malikopoulos3 274w4rv 2c3m30p PDFDocument9 pagesMalikopoulos3 274w4rv 2c3m30p PDFSuraj KanojiaNo ratings yet
- Joint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkFrom EverandJoint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkNo ratings yet
- Chapter 12Document29 pagesChapter 12Asem ShabanNo ratings yet
- ASPEN - T3 and T4Document25 pagesASPEN - T3 and T4Rahul ParmarNo ratings yet
- NX75 Siemens PLM NX CAM High Productivity Part ManufacturingDocument20 pagesNX75 Siemens PLM NX CAM High Productivity Part ManufacturingsandalosandaloNo ratings yet
- A Modern Tool in The Investigation of Indoor Flammable Gas Migration - GexConDocument12 pagesA Modern Tool in The Investigation of Indoor Flammable Gas Migration - GexConDM2No ratings yet
- Strategic Decisions Selection Methods in HealthCare A Systematic Literature ReviewDocument6 pagesStrategic Decisions Selection Methods in HealthCare A Systematic Literature ReviewdsshhkNo ratings yet
- Mining Grade ControlDocument6 pagesMining Grade Controlminerito221175% (8)
- PHD Information Brochure 2021 22 Even 02-12-21Document13 pagesPHD Information Brochure 2021 22 Even 02-12-21Gmv VijuNo ratings yet
- 346 Chapter 13 HWSolutionsDocument17 pages346 Chapter 13 HWSolutionsSu4family0% (1)
- (Narda) EFC-400 Software For Simulation of Electromagnetic Fields Produced by High-Voltage Lines and Electric Power SystemsDocument2 pages(Narda) EFC-400 Software For Simulation of Electromagnetic Fields Produced by High-Voltage Lines and Electric Power SystemsMarius LoleaNo ratings yet
- Tr-Bamboo Production NC IiDocument100 pagesTr-Bamboo Production NC IiITech MalasiquiNo ratings yet
- Power System Harmonic Analysis (Jos Arrillaga Bruce Smith, Neville Watson & Alan Wood)Document382 pagesPower System Harmonic Analysis (Jos Arrillaga Bruce Smith, Neville Watson & Alan Wood)Angel Pm90% (10)
- A Review of Physics Simulators For Robotic ApplicationsDocument16 pagesA Review of Physics Simulators For Robotic ApplicationsHarshil NaikNo ratings yet
- Equipment Selection For Surface MiningDocument25 pagesEquipment Selection For Surface MiningYSAGIANNo ratings yet
- Car-Tycoon-Simulator - FINAL Working FileDocument99 pagesCar-Tycoon-Simulator - FINAL Working FileIrish June TayagNo ratings yet
- HRM-301 Term PaperDocument18 pagesHRM-301 Term PaperShaiful Islam HimelNo ratings yet
- Hyundai-robotics-Industrial Robot Series Eng 0802Document2 pagesHyundai-robotics-Industrial Robot Series Eng 0802jitender kumar0% (1)
- Machine Learning ABC Cuts Costly StudiesDocument45 pagesMachine Learning ABC Cuts Costly Studieshasan najiNo ratings yet
- MTech BITSDocument11 pagesMTech BITSVaratharajan100% (1)
- Visible Light CommunicationDocument62 pagesVisible Light CommunicationmuharremNo ratings yet
- Characterization and Validation of The Slim-Form Open-Ended Coaxial Probe For The Dielectric Characterization of Biological Tissues at Millimeter-Wave FrequenciesDocument3 pagesCharacterization and Validation of The Slim-Form Open-Ended Coaxial Probe For The Dielectric Characterization of Biological Tissues at Millimeter-Wave FrequenciesDenis JaissonNo ratings yet
- Organization Study On MRPLDocument26 pagesOrganization Study On MRPLRavi Baliga K50% (2)
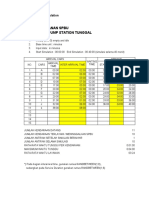
- Simulasi Layanan Spbu Dengan Gas Pump Station Tunggal: Modeling and SimulationDocument2 pagesSimulasi Layanan Spbu Dengan Gas Pump Station Tunggal: Modeling and SimulationBetta CanduNo ratings yet
- Registration For1Document3 pagesRegistration For1Hod BTNo ratings yet
- Role of Industry 4.0 in Supplier Selection: Priyanka Verma, G S SagarDocument9 pagesRole of Industry 4.0 in Supplier Selection: Priyanka Verma, G S SagarNabila AinNo ratings yet
- Scaling of Differential EquationsDocument149 pagesScaling of Differential Equationsalfonso lopez alquisirez100% (1)
- SPPU High Performance ComputingDocument12 pagesSPPU High Performance ComputingGovind RajputNo ratings yet
- Epanet DescriptionDocument17 pagesEpanet Descriptionamhosny64No ratings yet