You might also like
- 05 Guided Reading Activity AnswersDocument6 pages05 Guided Reading Activity AnswersArjay TiempoNo ratings yet
- Insar, A Tool For Measuring Earth'S Surface Deformation: Quick Quick StudyDocument2 pagesInsar, A Tool For Measuring Earth'S Surface Deformation: Quick Quick StudysunNo ratings yet
- Practical Applications of Remote Sensing: DistinguishedDocument8 pagesPractical Applications of Remote Sensing: DistinguisheddishankmpatelNo ratings yet
- Applications of Satellite Imaging RadarDocument8 pagesApplications of Satellite Imaging RadaryordyNo ratings yet
- TITLE: Comparison For Different Radar SatDocument3 pagesTITLE: Comparison For Different Radar SatsatoruheineNo ratings yet
- Remote SensingDocument18 pagesRemote Sensingpowerman619No ratings yet
- Basics of Remote Sensing and Gis Ce 333 Unit - 1 Remote SensingDocument13 pagesBasics of Remote Sensing and Gis Ce 333 Unit - 1 Remote SensingShanmuga SundaramNo ratings yet
- Unesco - Eolss Sample Chapters: Satellite MeteorologyDocument13 pagesUnesco - Eolss Sample Chapters: Satellite MeteorologySam LawrenceNo ratings yet
- Rs - Data Aq Spaceborn SysDocument12 pagesRs - Data Aq Spaceborn SysIhsan AltundasNo ratings yet
- Sarus Er ManualDocument31 pagesSarus Er ManualCristhian ValladaresNo ratings yet
- Remote Sensing DataDocument51 pagesRemote Sensing DataAyoub EzubeikNo ratings yet
- Remote Sensing PresentationDocument24 pagesRemote Sensing PresentationKaran RoyNo ratings yet
- Soil Moisture Retrieval From AMSR-EDocument15 pagesSoil Moisture Retrieval From AMSR-EJNo ratings yet
- Tutorial - Fundamentals of Remote Sensing Microwave Remote Sensing - IntroductionDocument3 pagesTutorial - Fundamentals of Remote Sensing Microwave Remote Sensing - Introductionsubbu_843No ratings yet
- Microwave Remote SensingDocument49 pagesMicrowave Remote Sensingsam.scribd100% (1)
- Active and Pasive Remote SensingDocument15 pagesActive and Pasive Remote SensingLindsay SotoNo ratings yet
- GPR - Landmine DetectionDocument12 pagesGPR - Landmine Detectionnimitjain03071991No ratings yet
- Eidence For The Earthquake - Volcano ConnectionDocument3 pagesEidence For The Earthquake - Volcano Connectiong.ponmudiNo ratings yet
- Delta-DOR: The One-Nanoradian Navigation Measurement System of The Deep Space Network - History, Architecture, and ComponentryDocument46 pagesDelta-DOR: The One-Nanoradian Navigation Measurement System of The Deep Space Network - History, Architecture, and ComponentrytitockmenteNo ratings yet
- Applications of Remote SensingDocument2 pagesApplications of Remote SensingWon offNo ratings yet
- SAR Tutorial March 2013Document38 pagesSAR Tutorial March 2013karedokNo ratings yet
- Dams EvaluationDocument92 pagesDams EvaluationmidoNo ratings yet
- Rsga R16 - Unit-1Document19 pagesRsga R16 - Unit-1Sairam ChundruNo ratings yet
- Introduction To Microwave Remote SensingDocument28 pagesIntroduction To Microwave Remote SensingbingwazzupNo ratings yet
- Nuevo Radiotelescopio de AreciboDocument96 pagesNuevo Radiotelescopio de AreciboEl Nuevo Día0% (1)
- Remote Sensing Is The SmallDocument9 pagesRemote Sensing Is The SmallYoppi LisyadiNo ratings yet
- GE 501 SummaryDocument7 pagesGE 501 SummaryRhea Lyn CayobitNo ratings yet
- Applications of Communication SatelliteDocument5 pagesApplications of Communication SatelliteSeenu HassanNo ratings yet
- Monitoring Small Dams in Semi-Add Regions Using Remote Sensing and GISDocument17 pagesMonitoring Small Dams in Semi-Add Regions Using Remote Sensing and GISnavnathgadhaveNo ratings yet
- B J Urgen M Uller A B: StampDocument12 pagesB J Urgen M Uller A B: StampThym 7No ratings yet
- Interferometric Synthetic Aperture Radar InSAR ItsDocument6 pagesInterferometric Synthetic Aperture Radar InSAR Itsjacob mooreNo ratings yet
- Remote SensingDocument8 pagesRemote SensingYash SinkarNo ratings yet
- Sailing The Planets:: Planetary Exploration From Guided BalloonsDocument25 pagesSailing The Planets:: Planetary Exploration From Guided BalloonsClifford StoneNo ratings yet
- Remote Sensing With Earthquake EngineeringDocument5 pagesRemote Sensing With Earthquake EngineeringpankajNo ratings yet
- Interferometric Synthetic Aperture Radar InSAR ItsDocument6 pagesInterferometric Synthetic Aperture Radar InSAR ItskridatimaNo ratings yet
- Introduction To Satellite Geodesy: Ge 501: Lecture 1 By: Romer S. BongbongaDocument20 pagesIntroduction To Satellite Geodesy: Ge 501: Lecture 1 By: Romer S. BongbongaRhea Lyn Cayobit100% (2)
- Application of Remote SensingDocument33 pagesApplication of Remote SensingthanhNo ratings yet
- Doplar Radar StudyDocument26 pagesDoplar Radar StudyDeeya BanerjeeNo ratings yet
- 1 Current ScienceDocument6 pages1 Current SciencekapiloberaiNo ratings yet
- Handout 04Document10 pagesHandout 04JAMESNo ratings yet
- Microwave and Lidar Sensi̇ngDocument100 pagesMicrowave and Lidar Sensi̇ngMehmet YILMAZNo ratings yet
- Assignment Gis 1Document7 pagesAssignment Gis 1Ummiey SyahirahNo ratings yet
- Fitting Tidal Constituents To Altimeter DataDocument5 pagesFitting Tidal Constituents To Altimeter DataMr. Imran Ahmed Siddiqi (S/L) PhysicsNo ratings yet
- NR-Lab2-Remote SensingDocument42 pagesNR-Lab2-Remote SensingvivaaaaaNo ratings yet
- Radar BasicDocument22 pagesRadar Basicyudinraylerio.garciaNo ratings yet
- Ground Penetrating Radar (GPR) For SubsurfaceDocument18 pagesGround Penetrating Radar (GPR) For Subsurfaceroland100% (1)
- Exploration: of The Ocean BasinsDocument3 pagesExploration: of The Ocean BasinsSergs jonelNo ratings yet
- AsterDocument12 pagesAsterBob AndrepontNo ratings yet
- NASA 100374main SolarXrayImager-FactsheetnewDocument2 pagesNASA 100374main SolarXrayImager-FactsheetnewNASAdocumentsNo ratings yet
- What Is GeodesyDocument4 pagesWhat Is GeodesyEndashaw DebruNo ratings yet
- Yu Et Al 2014 GNSS RemoteSEnsingDocument14 pagesYu Et Al 2014 GNSS RemoteSEnsingDiana Paola Estupinan RomeroNo ratings yet
- Coseismic Displacements of The 14 November 2016 MDocument13 pagesCoseismic Displacements of The 14 November 2016 MayuNo ratings yet
- Key Terra FactsDocument13 pagesKey Terra FactsjhonNo ratings yet
- 1 s2.0 S0273117717305082 MainDocument16 pages1 s2.0 S0273117717305082 MainEDWIN RODRIGO LUNA VIZHÑAYNo ratings yet
- (15200477 - Bulletin of The American Meteorological Society) Satellite-Based Atmospheric Infrared Sounder Development and ApplicationsDocument22 pages(15200477 - Bulletin of The American Meteorological Society) Satellite-Based Atmospheric Infrared Sounder Development and Applicationsluizfelipe94No ratings yet
- Aperture Space Telescope (ATLAST) : Implications For TechnologyDocument12 pagesAperture Space Telescope (ATLAST) : Implications For TechnologyAbhishek BakshiNo ratings yet
- Sci Lemoine 1mDocument7 pagesSci Lemoine 1mDiretoria Sigma SocietyNo ratings yet
- 2009EOS Article1111Document4 pages2009EOS Article1111chbgsNo ratings yet
- Geological MappingDocument11 pagesGeological MappingnoveNo ratings yet
- Impact of Aerospace Technology on Studies of the Earth's AtmosphereFrom EverandImpact of Aerospace Technology on Studies of the Earth's AtmosphereNo ratings yet
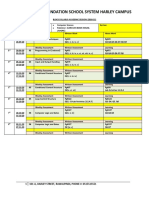
- Air Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551Document1 pageAir Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551umairNo ratings yet
- Air Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551Document1 pageAir Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551umairNo ratings yet
- Air Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551Document4 pagesAir Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551umairNo ratings yet
- Objective Professional Skills: Leadership Activities and AwardsDocument4 pagesObjective Professional Skills: Leadership Activities and AwardsumairNo ratings yet
- Air Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551Document1 pageAir Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551umairNo ratings yet
- Air Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551Document1 pageAir Foundation School System Harley Campus: 1 101-A, HARLEY STREET, RAWALPINDI, PHONE #: 0515515551umairNo ratings yet
- 4 Leaky Aquifers: !ci+++-A/. '. M.-Tr$szfaceDocument26 pages4 Leaky Aquifers: !ci+++-A/. '. M.-Tr$szfaceumairNo ratings yet
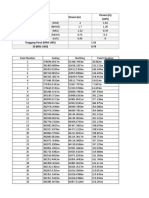
- Screening Details For Next Phase of Interview: Sr. # Name Contact No. Whatsapp No./ IMODocument5 pagesScreening Details For Next Phase of Interview: Sr. # Name Contact No. Whatsapp No./ IMOumairNo ratings yet
- Shad Low 2014Document10 pagesShad Low 2014umairNo ratings yet
- Seismic Reservoir Characterisation: 6.1 Amplitude-Versus-Offset (AVO)Document10 pagesSeismic Reservoir Characterisation: 6.1 Amplitude-Versus-Offset (AVO)umairNo ratings yet
- Wil SnallDocument1 pageWil SnallumairNo ratings yet
- Points Deducted Points Earned - 43.3 56.7 / 100Document5 pagesPoints Deducted Points Earned - 43.3 56.7 / 100umairNo ratings yet
- StratigraphyDocument7 pagesStratigraphyumairNo ratings yet
- Pumping Test in Leaky and Unconfined AquifersDocument11 pagesPumping Test in Leaky and Unconfined AquifersumairNo ratings yet
- Comparison Between Neuman (1975) and Jacob (1946) Application For Analysing Pumping Test Data of Unconfined AquiferDocument9 pagesComparison Between Neuman (1975) and Jacob (1946) Application For Analysing Pumping Test Data of Unconfined AquiferumairNo ratings yet
- ESS 454 Hydrogeology: Instructor: Michael Brown Brown@ess - Washington.eduDocument7 pagesESS 454 Hydrogeology: Instructor: Michael Brown Brown@ess - Washington.eduumairNo ratings yet
- Azeotropic Data-II (1962)Document103 pagesAzeotropic Data-II (1962)吳尚謙No ratings yet
- Welded Nickel and Nickel-Cobalt Alloy Pipe: Standard Specification ForDocument5 pagesWelded Nickel and Nickel-Cobalt Alloy Pipe: Standard Specification ForZouhair BoukriNo ratings yet
- Carbonic Anhydrase Immobilized On Encapsulated Magnetic Nanoparticles For CO2 SequestrationDocument8 pagesCarbonic Anhydrase Immobilized On Encapsulated Magnetic Nanoparticles For CO2 SequestrationASinopoliNo ratings yet
- StoichiometryDocument16 pagesStoichiometryRinzel A MalbasNo ratings yet
- Possible Hazards and Contributing Factors Associated With Medical Devices (ISO 14971:2000, Annex D)Document3 pagesPossible Hazards and Contributing Factors Associated With Medical Devices (ISO 14971:2000, Annex D)hamed IranpourNo ratings yet
- Trimethylamine Oxide in Marine Products: J.S.C.I.Document7 pagesTrimethylamine Oxide in Marine Products: J.S.C.I.Veneta GizdakovaNo ratings yet
- Fundamentals of Metal Matrix CompositesDocument19 pagesFundamentals of Metal Matrix CompositesAstriaNo ratings yet
- Astm 239 PreceeDocument4 pagesAstm 239 PreceeJesus Antonio Zuniga Martinez100% (1)
- Koord 17042019Document688 pagesKoord 17042019Totok GapuradianNo ratings yet
- 2006 - Dong Et Al - Bulk and Dispersed Aqueous Phase Behavior of PhytantriolDocument7 pages2006 - Dong Et Al - Bulk and Dispersed Aqueous Phase Behavior of PhytantriolHe ZeeNo ratings yet
- 2151902Document49 pages2151902swarajNo ratings yet
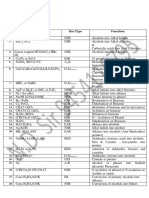
- Organic ReagentsDocument3 pagesOrganic ReagentsKushagra Rai100% (1)
- DC MotorsDocument8 pagesDC MotorsgireeshNo ratings yet
- 5991-5412ES Agilent LC Hardware SpanishDocument45 pages5991-5412ES Agilent LC Hardware SpanishDANIEL-LABJMENo ratings yet
- 2D MBene CRB Derived Form MAB Phase Cr2AlB2Document5 pages2D MBene CRB Derived Form MAB Phase Cr2AlB2PEERADA AKARAVINEKNo ratings yet
- Sulphuric AcidDocument4 pagesSulphuric AcidKhai AzNo ratings yet
- Alfa Laval Flexible Bleaching Solutions Application Brochure enDocument12 pagesAlfa Laval Flexible Bleaching Solutions Application Brochure enJotirmoy AichNo ratings yet
- NJP800 Operational ManualDocument45 pagesNJP800 Operational ManualJet PilotNo ratings yet
- Appendix A Appendix A Standard Solutions and Reference Materials PDFDocument8 pagesAppendix A Appendix A Standard Solutions and Reference Materials PDFFiorella MeoñoNo ratings yet
- Food Chemistry: Shuo Wang, Xiaojun Cui, Guozhen FangDocument7 pagesFood Chemistry: Shuo Wang, Xiaojun Cui, Guozhen FangLINDANo ratings yet
- How Is The Efficiency of Solar Panels Affected by The P-Type and N-Type Carrier Concentration in Semiconductors?Document5 pagesHow Is The Efficiency of Solar Panels Affected by The P-Type and N-Type Carrier Concentration in Semiconductors?International Journal of Innovative Science and Research Technology100% (1)
- Appliedchemistrylabmaual 2009Document23 pagesAppliedchemistrylabmaual 2009engineeringchemistryNo ratings yet
- WEBB 1999 Solubility and Diffusion of Carbon Dioxide in PolymersDocument6 pagesWEBB 1999 Solubility and Diffusion of Carbon Dioxide in Polymerspstedile1234No ratings yet
- GeographyDocument5 pagesGeographyBinduja Br100% (1)
- 08 - 2 Phase SeparatorDocument21 pages08 - 2 Phase SeparatorNoman AslamNo ratings yet
- Body Electrical Diagnosis: Quick Training Guide - QT611ADocument10 pagesBody Electrical Diagnosis: Quick Training Guide - QT611AThang TongNo ratings yet
- 513-Part 1-2016Document17 pages513-Part 1-2016Shaheen MaveNo ratings yet
- Moon Phase CalendarDocument4 pagesMoon Phase CalendarJoseph Stanovsky100% (1)
- Grade 10 Chemistry Week 9 Lesson 2Document4 pagesGrade 10 Chemistry Week 9 Lesson 2Nikoli MajorNo ratings yet