You might also like
- Retail Branding and Store Loyalty - Analysis in The Context of Reciprocity, Store Accessibility, and Retail Formats (PDFDrive)Document197 pagesRetail Branding and Store Loyalty - Analysis in The Context of Reciprocity, Store Accessibility, and Retail Formats (PDFDrive)Refu Se ShitNo ratings yet
- Sotney ColmDocument7 pagesSotney ColmrajNo ratings yet
- Candlestick Poster v3 PDFDocument4 pagesCandlestick Poster v3 PDFimukulgupta100% (3)
- Candlestick Poster v3 PDFDocument4 pagesCandlestick Poster v3 PDFimukulgupta100% (3)
- Tenses English Grammar PresentationDocument14 pagesTenses English Grammar PresentationMaz Gedi60% (5)
- Swing High and LowDocument4 pagesSwing High and Lowraj100% (1)
- Gps Positioning and SurveyingDocument62 pagesGps Positioning and SurveyinglisahunNo ratings yet
- FB Tutorial Migration Imaging Conditions 141201Document11 pagesFB Tutorial Migration Imaging Conditions 141201Leonardo Octavio Olarte SánchezNo ratings yet
- Zero Tolerance 2010Document16 pagesZero Tolerance 2010Adrian KozelNo ratings yet
- SCIENCE 11 WEEK 6c - Endogenic ProcessDocument57 pagesSCIENCE 11 WEEK 6c - Endogenic ProcessChristine CayosaNo ratings yet
- Norman, K. R., Pali Philology & The Study of BuddhismDocument13 pagesNorman, K. R., Pali Philology & The Study of BuddhismkhrinizNo ratings yet
- Electronic Fundamentals: B) The Active ElementDocument45 pagesElectronic Fundamentals: B) The Active ElementZbor ZborNo ratings yet
- Rectification and RestorationDocument63 pagesRectification and RestorationomrajNo ratings yet
- Depth Conversion of Post Stack Seismic Migrated Horizon Map MigrationDocument11 pagesDepth Conversion of Post Stack Seismic Migrated Horizon Map MigrationhimanshugstNo ratings yet
- Corrections 5.2 Radiometric Correction 5.3 Geometric CorrectionsDocument12 pagesCorrections 5.2 Radiometric Correction 5.3 Geometric CorrectionsVishal A Kumar100% (1)
- Digital Magnetic Compass and Gyroscope IntegrationDocument10 pagesDigital Magnetic Compass and Gyroscope IntegrationJosé Fernando Velázquez DamiánNo ratings yet
- Time Domain Back Projection Algorithms For SARDocument4 pagesTime Domain Back Projection Algorithms For SARnaivedya_mishraNo ratings yet
- Topographic Normalization LabDocument7 pagesTopographic Normalization LabsatoruheineNo ratings yet
- Aster Toutins ModelDocument6 pagesAster Toutins ModelCarlos Cacsire ContrerasNo ratings yet
- Radiometric, Atmospheric and Geometric Preprocessing Optical Earth Observed ImagesDocument15 pagesRadiometric, Atmospheric and Geometric Preprocessing Optical Earth Observed ImagesZenón Rizo FernándezNo ratings yet
- Estimating The GNSS Broadcast Ephemeris Error - PaperDocument4 pagesEstimating The GNSS Broadcast Ephemeris Error - PaperSebastian CiubanNo ratings yet
- Geometric Validation of Cartosat 1 ImageDocument6 pagesGeometric Validation of Cartosat 1 ImageCatalina peña castellanosNo ratings yet
- Task 1 Preprocessing: (Geometric Correction, Atmospheric Correction, Radiometric Correction, Normalization)Document20 pagesTask 1 Preprocessing: (Geometric Correction, Atmospheric Correction, Radiometric Correction, Normalization)satoruheineNo ratings yet
- A Study On The Geometric Correction Using Satellite ImagesDocument8 pagesA Study On The Geometric Correction Using Satellite ImagesridhuanNo ratings yet
- Applicationof PhotogrammetryforDocument12 pagesApplicationof PhotogrammetryforALLISON FABIOLA LOPEZ VALVERDENo ratings yet
- Data Analysis For Orthorectification Process of Formosat-2 Satellite Images On Surabaya and YogyakartaDocument8 pagesData Analysis For Orthorectification Process of Formosat-2 Satellite Images On Surabaya and YogyakartahepihapsariNo ratings yet
- Global Positioning System: Paper Presentation OnDocument10 pagesGlobal Positioning System: Paper Presentation OnSravan Kumar100% (1)
- Introduction To GPSDocument25 pagesIntroduction To GPSjamengoNo ratings yet
- Satellite Navigation and GPS: Unit - ViDocument45 pagesSatellite Navigation and GPS: Unit - ViDr. Madhu R100% (1)
- Remote Sensing Image ProcessingDocument137 pagesRemote Sensing Image ProcessingMahesh Pal100% (1)
- Grss-Chile 2017 Paper 31Document6 pagesGrss-Chile 2017 Paper 31Carlos A Cárdenas MNo ratings yet
- Geologic Mapping With Scaled 3D ImagesDocument5 pagesGeologic Mapping With Scaled 3D ImagesHumberto Diomedi MirandaNo ratings yet
- A Machine Learning Approach To GeoreferencingDocument5 pagesA Machine Learning Approach To GeoreferencingPunyashlok MahapatraNo ratings yet
- Remote Sensing Image CorrectionDocument23 pagesRemote Sensing Image CorrectionsangeethaNo ratings yet
- Vision-Based Localization and Mapping For An Autonomous MowerDocument8 pagesVision-Based Localization and Mapping For An Autonomous Mower柯秉宏No ratings yet
- Genetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationDocument23 pagesGenetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationhenrydclNo ratings yet
- Odometry Fusion IMU - 1.5066524Document9 pagesOdometry Fusion IMU - 1.5066524flv_91No ratings yet
- Monitorizarea Barajelor Prin Scanare 3dDocument10 pagesMonitorizarea Barajelor Prin Scanare 3dMihai Madalin SuicaNo ratings yet
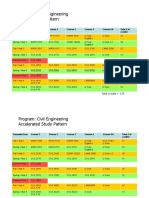
- (Affiliated To Pokhara University) Department of Civil EngineeringDocument22 pages(Affiliated To Pokhara University) Department of Civil EngineeringAnurag JoshiNo ratings yet
- Geometric CorrectionDocument7 pagesGeometric Correctionfiruman09No ratings yet
- Question and DiscussionDocument2 pagesQuestion and DiscussionHamierul Mohamad100% (1)
- Calibration of IRS-1C PAN-cameraDocument9 pagesCalibration of IRS-1C PAN-camerarezaNo ratings yet
- Interferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediaDocument9 pagesInterferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediakowsilaxNo ratings yet
- DownloadDocument9 pagesDownloadAziz Fajar SetiawanNo ratings yet
- Unit4 SatcomDocument50 pagesUnit4 SatcomUtkarsh UjjwalNo ratings yet
- An Overview of SAR InterferometryDocument15 pagesAn Overview of SAR InterferometrySanjoy BasakNo ratings yet
- GyrosDocument6 pagesGyrosversineNo ratings yet
- Global Positioning System: AbstractDocument7 pagesGlobal Positioning System: AbstractGanesh VenkatesanNo ratings yet
- Algo3DFusionsMems PDFDocument5 pagesAlgo3DFusionsMems PDFsmouhabNo ratings yet
- Pre Lab 1Document5 pagesPre Lab 1Jazmine PalcesNo ratings yet
- CCE 2018 Paper 60Document6 pagesCCE 2018 Paper 60JLuis LuNaNo ratings yet
- Base PaperDocument6 pagesBase Paperwa5jeedNo ratings yet
- Analytical SRP Model For GLONASS Initial ResultsDocument10 pagesAnalytical SRP Model For GLONASS Initial ResultsEndless LoveNo ratings yet
- Digital Image Analysis: Pre-ProcessingDocument32 pagesDigital Image Analysis: Pre-ProcessingTatyana KOVPAKNo ratings yet
- Simulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathDocument6 pagesSimulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathIon TomitaNo ratings yet
- Improved Lunar Edge Response Function For On-Orbit Modulation Transfer Function Calibration Using Albedo FlatteningDocument12 pagesImproved Lunar Edge Response Function For On-Orbit Modulation Transfer Function Calibration Using Albedo FlatteningsankhaNo ratings yet
- Indoor Space 3D Visual ReconstructionDocument7 pagesIndoor Space 3D Visual ReconstructionPrince BlissfulNo ratings yet
- Isprs Archives XLI B1 327 2016Document6 pagesIsprs Archives XLI B1 327 2016nabilNo ratings yet
- 12 Determination Orbite PDFDocument8 pages12 Determination Orbite PDFjjaavvmmNo ratings yet
- Ex6. Find Out The Scale of Photograph Imagery With Reference To A Given Map PDFDocument3 pagesEx6. Find Out The Scale of Photograph Imagery With Reference To A Given Map PDFHanama ReddiNo ratings yet
- Single-Shot Three-Dimensional Imaging With A Metasurface Depth CameraDocument21 pagesSingle-Shot Three-Dimensional Imaging With A Metasurface Depth Cameramadridista suNo ratings yet
- ECE174 GPS Computer ProjectDocument5 pagesECE174 GPS Computer ProjectChakshu GautamNo ratings yet
- Optimisation of Parameters in Seismic Data Acquisition For Better Subsurface Imaging in Eastern Gamij, GujaratDocument7 pagesOptimisation of Parameters in Seismic Data Acquisition For Better Subsurface Imaging in Eastern Gamij, GujaratMithunNo ratings yet
- Data Analysis For Orthorectification Process of Formosat-2 Satellite Images On Surabaya and YogyakartaDocument8 pagesData Analysis For Orthorectification Process of Formosat-2 Satellite Images On Surabaya and YogyakartahepihapsariNo ratings yet
- Fast Georeferencing Images Throuth Generalized Photogr Ammetr Ic AlgorithmsDocument5 pagesFast Georeferencing Images Throuth Generalized Photogr Ammetr Ic AlgorithmsKobalt von KriegerischbergNo ratings yet
- Qualifying Interpretation Assets: 17 June 2010 - Eage Daily NewsDocument1 pageQualifying Interpretation Assets: 17 June 2010 - Eage Daily Newsanima1982No ratings yet
- Implementing A Sensor Fusion Algorithm For 3D Orientation Detection With Inertial/Magnetic SensorsDocument5 pagesImplementing A Sensor Fusion Algorithm For 3D Orientation Detection With Inertial/Magnetic Sensorscipri267No ratings yet
- International Journal of Engineering Research and Development (IJERD)Document4 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Optical Flow Paper181finalDocument7 pagesOptical Flow Paper181finaljohndenningsNo ratings yet
- Finite Element Modelling of Stone Column Installation: Review of Modelling Practices and Case Study With Plaxis 2DDocument8 pagesFinite Element Modelling of Stone Column Installation: Review of Modelling Practices and Case Study With Plaxis 2DrajNo ratings yet
- WPR5 7131 PDFDocument1 pageWPR5 7131 PDFrajNo ratings yet
- New Doc 118 - 1Document1 pageNew Doc 118 - 1rajNo ratings yet
- BSRM Ultima BrochureDocument2 pagesBSRM Ultima BrochuresaifuzzamanNo ratings yet
- Peanut AllergyDocument4 pagesPeanut AllergyLNICCOLAIONo ratings yet
- Equilibrium of A Rigid BodyDocument30 pagesEquilibrium of A Rigid BodyChristine Torrepenida RasimoNo ratings yet
- An Enhanced Radio Network Planning Methodology For GSM-R CommunicationsDocument4 pagesAn Enhanced Radio Network Planning Methodology For GSM-R CommunicationsNuno CotaNo ratings yet
- Fashion DatasetDocument2,644 pagesFashion DatasetBhawesh DeepakNo ratings yet
- Corelink Mmu600ae TRM 101412 0100 00 enDocument194 pagesCorelink Mmu600ae TRM 101412 0100 00 enLv DanielNo ratings yet
- Punches and Kicks Are Tools To Kill The Ego.Document1 pagePunches and Kicks Are Tools To Kill The Ego.arunpandey1686No ratings yet
- Ethical Hacking IdDocument24 pagesEthical Hacking IdSilvester Dian Handy PermanaNo ratings yet
- Sage TutorialDocument115 pagesSage TutorialChhakuli GiriNo ratings yet
- HKUST 4Y Curriculum Diagram CIVLDocument4 pagesHKUST 4Y Curriculum Diagram CIVLfrevNo ratings yet
- Diagnosis ListDocument1 pageDiagnosis ListSenyorita KHayeNo ratings yet
- Microsoft Powerpoint BasicsDocument20 pagesMicrosoft Powerpoint BasicsJonathan LocsinNo ratings yet
- WSD M1a283 B50Document9 pagesWSD M1a283 B50'Lampa'No ratings yet
- Writ Petition 21992 of 2019 FinalDocument22 pagesWrit Petition 21992 of 2019 FinalNANDANI kumariNo ratings yet
- 95-03097 Ballvlv300350 WCB PDFDocument26 pages95-03097 Ballvlv300350 WCB PDFasitdeyNo ratings yet
- CandyDocument24 pagesCandySjdb FjfbNo ratings yet
- Ford Focus MK2 Headlight Switch Wiring DiagramDocument1 pageFord Focus MK2 Headlight Switch Wiring DiagramAdam TNo ratings yet
- Celula de CargaDocument2 pagesCelula de CargaDavid PaezNo ratings yet
- Pogon Lifta MRL PDFDocument128 pagesPogon Lifta MRL PDFMašinsko ProjektovanjeNo ratings yet
- The One With The ThumbDocument4 pagesThe One With The Thumbnoelia20_09No ratings yet
- Leather PuppetryDocument8 pagesLeather PuppetryAnushree BhattacharyaNo ratings yet
- 2010 Information ExchangeDocument15 pages2010 Information ExchangeAnastasia RotareanuNo ratings yet
- Bagian AwalDocument17 pagesBagian AwalCitra Monalisa LaoliNo ratings yet
- DHA - Jebel Ali Emergency Centre + RevisedDocument5 pagesDHA - Jebel Ali Emergency Centre + RevisedJam EsNo ratings yet