You might also like
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Designing of Double Sided Linear Induction MotorDocument7 pagesDesigning of Double Sided Linear Induction MotorCalix LeonelNo ratings yet
- Ee6703 Sem Small and Big NotesDocument107 pagesEe6703 Sem Small and Big NotesSANGEETHA JAYAMURUGANNo ratings yet
- Linear Induction Motor: A Report OnDocument17 pagesLinear Induction Motor: A Report OnUtsav GoyalNo ratings yet
- SPECIAL ELECTRICAL MACHINES - Questions & AnswersDocument38 pagesSPECIAL ELECTRICAL MACHINES - Questions & AnswersMuhammad JunaidNo ratings yet
- Ee 2403 Special Electrical MachinesDocument21 pagesEe 2403 Special Electrical MachinesSurya KrishnanNo ratings yet
- 185 - EE8005, EE6703 Special Electrical Machines - Question BankDocument15 pages185 - EE8005, EE6703 Special Electrical Machines - Question BankNiteshNarukaNo ratings yet
- Ee2403 (Special Electrical Machines Question BankDocument20 pagesEe2403 (Special Electrical Machines Question Bankkrish_skumar6302No ratings yet
- EE2403 SEM 2 Marks PDFDocument15 pagesEE2403 SEM 2 Marks PDFkesavantNo ratings yet
- Induction MotorDocument20 pagesInduction MotorC V VIJAY KUMASRNo ratings yet
- Induction Motors Notes Wit Worked ExamplesDocument19 pagesInduction Motors Notes Wit Worked ExamplesFred RotichNo ratings yet
- Linear Induction Motor - Thesis PDFDocument4 pagesLinear Induction Motor - Thesis PDFdnqjxbz2100% (2)
- Lec#7 Linear MotorDocument23 pagesLec#7 Linear MotorKhaled AshryNo ratings yet
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Special Motors AssignmentDocument11 pagesSpecial Motors Assignmentnelis01No ratings yet
- DC MotorDocument14 pagesDC MotorShreyash SargarNo ratings yet
- 12.13 Linear Induction Motor (LIM) : AdvantagesDocument3 pages12.13 Linear Induction Motor (LIM) : AdvantagesArif IqbalNo ratings yet
- 15.a-Linear Induction MotorDocument3 pages15.a-Linear Induction MotorMakkal ThalaivanNo ratings yet
- Ee8401 - em Ii - Question Bank - Unit5Document5 pagesEe8401 - em Ii - Question Bank - Unit5DEVINo ratings yet
- Electrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9Document48 pagesElectrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9TadeleHaileNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric Companyafe2000must9083No ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanyRizwan HameedNo ratings yet
- Induction MotorDocument24 pagesInduction MotorAMAMA KHANNo ratings yet
- MS Pro 2Document54 pagesMS Pro 2srinureddy2014No ratings yet
- Servo MechanismDocument24 pagesServo Mechanismmushahid980No ratings yet
- Assignment Synchronous Generator and Induction MotorDocument20 pagesAssignment Synchronous Generator and Induction MotorSyahril Abdullah100% (1)
- Special Purpose MachinesDocument7 pagesSpecial Purpose MachinesSrini VasuluNo ratings yet
- Linear Induction Motor-Equivalent-Circuit Model: J. Duncan, C.Eng., M.I.E.E., Mem.I.E.E.EDocument7 pagesLinear Induction Motor-Equivalent-Circuit Model: J. Duncan, C.Eng., M.I.E.E., Mem.I.E.E.EShashank SinghNo ratings yet
- Fabrication of Overhead CraneDocument45 pagesFabrication of Overhead CraneWORLD360No ratings yet
- LSPMDocument38 pagesLSPMSathiyaraj KondusamyNo ratings yet
- ECBDocument22 pagesECBBipin RajendranNo ratings yet
- Gew 19001007064 Vishnu BhardwajDocument25 pagesGew 19001007064 Vishnu BhardwajVishnu BhardwajNo ratings yet
- Single Phase Induction MotorsDocument22 pagesSingle Phase Induction MotorsKALYANKOLO UMARUNo ratings yet
- Motor Fundamentals PDFDocument12 pagesMotor Fundamentals PDFrajeshpalla4uNo ratings yet
- Special - Electrical - Machines QBDocument25 pagesSpecial - Electrical - Machines QBVel MuruganNo ratings yet
- Dual Side Double Acting Water Pumping System Using Scotch Yoke MechanismDocument16 pagesDual Side Double Acting Water Pumping System Using Scotch Yoke MechanismGera workuNo ratings yet
- DC Motor Are of 3 Types They Are .Document12 pagesDC Motor Are of 3 Types They Are .Krishna100% (1)
- An Analysis of Bearingless AC MotorsDocument8 pagesAn Analysis of Bearingless AC Motorsalstn7906No ratings yet
- Special Electrical Machines FULL PART A &B Question BankDocument220 pagesSpecial Electrical Machines FULL PART A &B Question BankSanjeevKumarKNo ratings yet
- Chapter-1: Introduction: 1.2 Aim and Objective of ProjectDocument12 pagesChapter-1: Introduction: 1.2 Aim and Objective of Projectsameerpatel15770No ratings yet
- IELMO401 Operate Electrical MotorsDocument75 pagesIELMO401 Operate Electrical MotorsdoveemmyNo ratings yet
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDocument54 pagesOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- DC MotorDocument21 pagesDC MotorSameera MadhushankaNo ratings yet
- Repulsion MotorDocument10 pagesRepulsion MotorAhmed Abd El MoatiNo ratings yet
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MovieNo ratings yet
- Wall Painting ReportDocument40 pagesWall Painting Reportganesh100% (1)
- Single Phase Induction MotorsDocument11 pagesSingle Phase Induction MotorsSafnas KariapperNo ratings yet
- DC Machines Conceptual Qtns and SolutionsDocument7 pagesDC Machines Conceptual Qtns and SolutionsBaluku DavidNo ratings yet
- In-Wheel Motor Design For Electric VehiclesDocument7 pagesIn-Wheel Motor Design For Electric VehiclesHuNo ratings yet
- Essential Parts of A Shaded-Pole MotorDocument16 pagesEssential Parts of A Shaded-Pole MotorShoaib Khan100% (3)
- Ijarcce 16Document3 pagesIjarcce 16Black MambaNo ratings yet
- Fundamentals OF Polyphase Electric MotorsDocument12 pagesFundamentals OF Polyphase Electric Motors1960maocNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
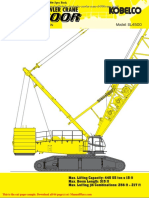
- Kobelco Hydraulic Crawler Crane Sl4500r Spec BookDocument6 pagesKobelco Hydraulic Crawler Crane Sl4500r Spec Bookina100% (35)
- Subject: Page 1 of 7Document7 pagesSubject: Page 1 of 7TLK ChannelNo ratings yet
- WL-80 FTCDocument5 pagesWL-80 FTCMr.Thawatchai hansuwanNo ratings yet
- E-Book AC VRVDocument238 pagesE-Book AC VRVNyoman TristaNo ratings yet
- Lubrication Solutions For Aerospace and Military ApplicationsDocument6 pagesLubrication Solutions For Aerospace and Military ApplicationskumarNo ratings yet
- Relayd 1Document1 pageRelayd 1amirtha_s2238No ratings yet
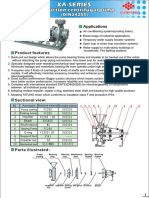
- Evergush Xa en 50hzDocument15 pagesEvergush Xa en 50hzFikry HarzanNo ratings yet
- Clean The Throttle Body and RelocateDocument8 pagesClean The Throttle Body and RelocateJorge Luis DislaGonzalezNo ratings yet
- Afex Caterpillar-D10t2Document1 pageAfex Caterpillar-D10t2enricoNo ratings yet
- Transmission - Install: Disassembly and AssemblyDocument7 pagesTransmission - Install: Disassembly and AssemblyTheo AnggaraNo ratings yet
- Bombas Control HidraulicoDocument2 pagesBombas Control HidraulicoLenin CórdovaNo ratings yet
- Sil16 2Document4 pagesSil16 2Conrado Pinho JuniorNo ratings yet
- Manual (24 Abs 318-360)Document66 pagesManual (24 Abs 318-360)Carlos Manuel de la Hoz Serrano100% (1)
- Owner'S Manual & Competition Handbook Competition HandbookDocument164 pagesOwner'S Manual & Competition Handbook Competition HandbookAgape SniperNo ratings yet
- Industrial Range Sincro PDFDocument6 pagesIndustrial Range Sincro PDFHalit YalçınkayaNo ratings yet
- trsl0261 0510Document2 pagestrsl0261 0510Darrinel Perez CcordovaNo ratings yet
- Drillsprint 310316aDocument4 pagesDrillsprint 310316amateenNo ratings yet
- c96 AccesoriesDocument27 pagesc96 AccesoriesWAWANNo ratings yet
- Diesel EngineDocument8 pagesDiesel EngineFidel Alejandro RamirezNo ratings yet
- Ducts Pressure Losses Board: Carpark Souq Waqif Ahu - A Basement-1Document2 pagesDucts Pressure Losses Board: Carpark Souq Waqif Ahu - A Basement-1Karthy GanesanNo ratings yet
- Detroit DD15 Engine: Horsepower LB-FT Torque LitersDocument10 pagesDetroit DD15 Engine: Horsepower LB-FT Torque Litersfdpc198792% (13)
- Types of Air ConditionersDocument3 pagesTypes of Air ConditionersHanurag GokulNo ratings yet
- Boiler Maintenance Log SheetDocument33 pagesBoiler Maintenance Log Sheetsohel rana0% (1)
- Geeetech I3 Pro W Assembly ManualDocument116 pagesGeeetech I3 Pro W Assembly ManualV00D00100% (1)
- Nandipur 425MW CCPP Gas Turbine Operation ManualDocument268 pagesNandipur 425MW CCPP Gas Turbine Operation ManualMuhammad Awais100% (6)
- 2000 Jeep p0320Document13 pages2000 Jeep p0320dieselguruNo ratings yet
- BR Cat VF-W STD Eng r08 1Document268 pagesBR Cat VF-W STD Eng r08 1maxukaNo ratings yet
- Shpindeli SLFDocument60 pagesShpindeli SLFrayss1978No ratings yet
- Turbo Air ManualDocument46 pagesTurbo Air Manualsillyfruits99No ratings yet
- 1465304832-Eurolab EngDocument22 pages1465304832-Eurolab EngicaanmpzNo ratings yet