You might also like
- Desbalanceamento rotativo: análise e exemplosDocument7 pagesDesbalanceamento rotativo: análise e exemplosShueidy Braga50% (2)
- Relatório 1 - Sistema Vibratório Com Um Grau de LiberdadeDocument8 pagesRelatório 1 - Sistema Vibratório Com Um Grau de LiberdadeMarianna BürgelNo ratings yet
- Determinação da Razão de Amortecimento e Frequência NaturalDocument11 pagesDeterminação da Razão de Amortecimento e Frequência NaturalPedroNo ratings yet
- Vibração livre de sistema com amortecimento viscosoDocument11 pagesVibração livre de sistema com amortecimento viscosoJosé LimaNo ratings yet
- Lista de Exercícios Extras para P1 de Vibrações I - RDocument18 pagesLista de Exercícios Extras para P1 de Vibrações I - RPolly PeçanhaNo ratings yet
- Casos de Excitação Harmônica PDFDocument8 pagesCasos de Excitação Harmônica PDFRafael SenaNo ratings yet
- Vibração Flexural Forçada AnáliseDocument8 pagesVibração Flexural Forçada AnáliseAlbert AlmeidaNo ratings yet
- Aula 09 - Whirling e M+®todo de RayleighDocument15 pagesAula 09 - Whirling e M+®todo de RayleighShueidy BragaNo ratings yet
- T1 - Angelo - SouzaDocument11 pagesT1 - Angelo - SouzaAngelo SansonNo ratings yet
- Relatório Técnico - Aula Prática 5 - INTRODUÇÃO A ANÁLISE MODALDocument18 pagesRelatório Técnico - Aula Prática 5 - INTRODUÇÃO A ANÁLISE MODALFernando BittencourtNo ratings yet
- Relatorio Cordas VibrantesDocument8 pagesRelatorio Cordas VibrantesAndre HenriqueNo ratings yet
- Vibração torcional de sistema com amortecimento viscosoDocument9 pagesVibração torcional de sistema com amortecimento viscosoErlan OlveiraNo ratings yet
- Os Modelos Matemáticos TípicosDocument33 pagesOs Modelos Matemáticos TípicosSamuel Silva50% (2)
- Determinação dos parâmetros de vibração de uma viga biapoiada com desbalanceamento rotativoDocument16 pagesDeterminação dos parâmetros de vibração de uma viga biapoiada com desbalanceamento rotativoSérgio RigelNo ratings yet
- Exercicios Vibrações PDFDocument21 pagesExercicios Vibrações PDFAnonymous 0H1z4LT0FNo ratings yet
- Frequências naturais de sistemas mecânicosDocument5 pagesFrequências naturais de sistemas mecânicosRogério SouzaNo ratings yet
- Estabilidade transitória em sistemas de potênciaDocument25 pagesEstabilidade transitória em sistemas de potênciafuiazinhaNo ratings yet
- UNIFPA: Relatório da Experiência de Balanceamento Dinâmico de MotorDocument10 pagesUNIFPA: Relatório da Experiência de Balanceamento Dinâmico de MotorHennerson A. SilvaNo ratings yet
- Relatório - Exp2 - Frequências Próprias Complexas - Circuitos Elétricos 2 - Trim3.3Document12 pagesRelatório - Exp2 - Frequências Próprias Complexas - Circuitos Elétricos 2 - Trim3.3Fernando Henrique G. Zucatelli100% (2)
- P1 Lhamas U Code Vibras PDFDocument9 pagesP1 Lhamas U Code Vibras PDFPalomaNo ratings yet
- Trabalho de OndasDocument9 pagesTrabalho de OndasamorimmarianaNo ratings yet
- Determinação da curva de ressonância de um oscilador forçadoDocument11 pagesDeterminação da curva de ressonância de um oscilador forçadobiancasantos105100% (1)
- Resposta temporal de circuito RLC com diferentes componentesDocument8 pagesResposta temporal de circuito RLC com diferentes componentesAnna Carla JoiaNo ratings yet
- Modelagem Matemática de Sistemas Rotacionais MecânicosDocument5 pagesModelagem Matemática de Sistemas Rotacionais MecânicosRodrigo LimaNo ratings yet
- Circuito RLC em série: Resposta em frequênciaDocument6 pagesCircuito RLC em série: Resposta em frequênciaAnna Carla JoiaNo ratings yet
- Relatorio 11 Campo Magnetico de Um e Dois Fios Paralelos e LongosDocument9 pagesRelatorio 11 Campo Magnetico de Um e Dois Fios Paralelos e LongosTales Rodrigues Reis100% (1)
- Capítulo6 - Apostila de Mecânica Das VibraçõesDocument11 pagesCapítulo6 - Apostila de Mecânica Das VibraçõesHussein GazelNo ratings yet
- Vibrações mecânicas: exercícios de aplicação sobre sistemas de 1 grau de liberdadeDocument2 pagesVibrações mecânicas: exercícios de aplicação sobre sistemas de 1 grau de liberdadeDorivaldo GomesNo ratings yet
- Transformador - Definição e EquacoesDocument6 pagesTransformador - Definição e EquacoesMarcelo A. BrancoNo ratings yet
- 2º Relatório de Física II - Oscilações Harmônicas (Salvo Automaticamente)Document6 pages2º Relatório de Física II - Oscilações Harmônicas (Salvo Automaticamente)Itaylane MaltaNo ratings yet
- Indicador de Risco de Instabilidade de TensaoDocument7 pagesIndicador de Risco de Instabilidade de Tensaocarlos albertoNo ratings yet
- Isolamento de VibraçõesDocument9 pagesIsolamento de VibraçõesLaura CampesattoNo ratings yet
- Carga Massa Do Eletron - RelatorioDocument5 pagesCarga Massa Do Eletron - RelatorioMariane DuarteNo ratings yet
- Artigo-Eng Mario Esmeraldo - Prof Eduardo LeiteDocument10 pagesArtigo-Eng Mario Esmeraldo - Prof Eduardo Leiterodolfomc0905No ratings yet
- Lista Exercicios Forced ResponseDocument7 pagesLista Exercicios Forced ResponseHuana Lima CorrêaNo ratings yet
- Fichas Das Experiências ReaisDocument45 pagesFichas Das Experiências ReaisJacinto NhamposseNo ratings yet
- Rot5 G2 Matheus Rafael VictorDocument7 pagesRot5 G2 Matheus Rafael VictorMatheus Felippe Cavalcanti de AzevedoNo ratings yet
- Circuito RC, RL e RLC - Corrente Alternada Result A DosDocument13 pagesCircuito RC, RL e RLC - Corrente Alternada Result A Dosana_lucia_6No ratings yet
- CAPITULO 2 - Vibrações Com 1 GDLDocument9 pagesCAPITULO 2 - Vibrações Com 1 GDLLucas BalbinotNo ratings yet
- Lista 03 MHS - 1ECA - 1ECB RM551067Document7 pagesLista 03 MHS - 1ECA - 1ECB RM551067Vitor KallasNo ratings yet
- Resposta vibracional de sistemas de 1 GDL no MatlabDocument10 pagesResposta vibracional de sistemas de 1 GDL no MatlabRosiana SilvaNo ratings yet
- Relatório - Difração de Raios XDocument19 pagesRelatório - Difração de Raios XAlex VieiraNo ratings yet
- Análise e diagnóstico de vibrações em máquinas e estruturasDocument24 pagesAnálise e diagnóstico de vibrações em máquinas e estruturasmiguelduart100% (1)
- Bobinas de HelmholtzDocument13 pagesBobinas de HelmholtzPedro NakasuNo ratings yet
- 3 Lista de ExerciciosDocument4 pages3 Lista de ExerciciosSonia CiriloNo ratings yet
- 5º Relatório de Física Experimental III (Campo Magnético e Força Magnética Sobre Condutores de Corrente)Document4 pages5º Relatório de Física Experimental III (Campo Magnético e Força Magnética Sobre Condutores de Corrente)Ari Ribeiro JuniorNo ratings yet
- Aula 04Document28 pagesAula 04Jorge Henrique Marques MarianoNo ratings yet
- Capítulo 3 - Princípios de Conversão Eletromecânica de EnergiaDocument18 pagesCapítulo 3 - Princípios de Conversão Eletromecânica de EnergiaBia GarciaNo ratings yet
- 1a Lista VMG 2010 Com Adicionais CorrigidaDocument5 pages1a Lista VMG 2010 Com Adicionais CorrigidaJizzPontesNo ratings yet
- Rc-Filtro Passa BaixaDocument9 pagesRc-Filtro Passa BaixaKarina AlvesNo ratings yet
- Análise Vibração MáquinasDocument22 pagesAnálise Vibração MáquinasWanderson SantosNo ratings yet
- Prática 2 - Decremento LogarítimoDocument19 pagesPrática 2 - Decremento Logarítimowillian lopes peçanhaNo ratings yet
- Determinação da frequência natural de sistemas com 2 graus de liberdadeDocument8 pagesDeterminação da frequência natural de sistemas com 2 graus de liberdadePedroNo ratings yet
- Prática 3 - RelatórioDocument16 pagesPrática 3 - RelatórioHenrique Boaventura MedeirosNo ratings yet
- Estabilidade de sistemas elétricos e limites de transporteDocument32 pagesEstabilidade de sistemas elétricos e limites de transporteTaumar MoraisNo ratings yet
- Apontamentos Medidas Electricas I-3 PDFDocument25 pagesApontamentos Medidas Electricas I-3 PDFAmurildin Abubacar IbraimoNo ratings yet
- Trabalho de Gerência de Riscos IIIDocument5 pagesTrabalho de Gerência de Riscos IIIHennerson A. SilvaNo ratings yet
- Análise preliminar de riscos para oficina de fabricação industrial na UHE Ferreira GomesDocument15 pagesAnálise preliminar de riscos para oficina de fabricação industrial na UHE Ferreira GomesHennerson A. SilvaNo ratings yet
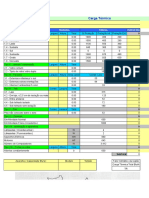
- Carga TermicaDocument7 pagesCarga TermicaRodrigo FilhoNo ratings yet
- Gas GLP - Check ListDocument15 pagesGas GLP - Check ListElias Barros de FigueiredoNo ratings yet
- Análise de Falhas - NovoDocument111 pagesAnálise de Falhas - NovoAilson Silva Alves100% (3)
- Relatório sobre absorvedor dinâmico de vibrações em experimento na UFPADocument13 pagesRelatório sobre absorvedor dinâmico de vibrações em experimento na UFPAHennerson A. SilvaNo ratings yet
- Experimento VIDocument11 pagesExperimento VIHennerson A. SilvaNo ratings yet
- Trabalho - Mapa de Riscos QuímicosDocument30 pagesTrabalho - Mapa de Riscos QuímicosHennerson A. SilvaNo ratings yet
- Relatório 5Document8 pagesRelatório 5Hennerson A. SilvaNo ratings yet
- Trabalho NRs 07, 08, 09 (FINAL)Document13 pagesTrabalho NRs 07, 08, 09 (FINAL)Hennerson A. SilvaNo ratings yet
- UNIFPA: Relatório da Experiência de Balanceamento Dinâmico de MotorDocument10 pagesUNIFPA: Relatório da Experiência de Balanceamento Dinâmico de MotorHennerson A. SilvaNo ratings yet
- Modelo de ContratoDocument5 pagesModelo de ContratoHennerson A. SilvaNo ratings yet
- Relatório 2Document10 pagesRelatório 2Hennerson A. SilvaNo ratings yet
- Gas GLP - Check ListDocument15 pagesGas GLP - Check ListElias Barros de FigueiredoNo ratings yet
- 7° RelatorioDocument7 pages7° RelatorioHennerson A. SilvaNo ratings yet
- Trabalho DisfagiaDocument9 pagesTrabalho DisfagiaHennerson A. SilvaNo ratings yet
- Relatório 1Document9 pagesRelatório 1Hennerson A. SilvaNo ratings yet
- Blocos Integrados Ao AutoCADDocument1 pageBlocos Integrados Ao AutoCADBruno ChivalskiNo ratings yet
- Termo de entrega de equipamentos ao campus Colorado do IFRODocument1 pageTermo de entrega de equipamentos ao campus Colorado do IFROgodoi2011No ratings yet
- Cálculo de VaporizaçãoDocument1 pageCálculo de VaporizaçãoHennerson A. SilvaNo ratings yet
- It 22 2018Document24 pagesIt 22 2018Afonso Sérgio De Sant'Anna GomesNo ratings yet
- PMOC HVC 2013 Rev ADocument75 pagesPMOC HVC 2013 Rev AHennerson A. SilvaNo ratings yet
- Projetando sistemas de combate a incêndioDocument51 pagesProjetando sistemas de combate a incêndioOlavo MonteiroNo ratings yet
- Rede Ar Comprim Rev SIMPLIF PDFDocument33 pagesRede Ar Comprim Rev SIMPLIF PDFLindemberg TrindadeNo ratings yet
- Modelo PMOCDocument16 pagesModelo PMOCChristianBure90% (21)
- NBR 14276 - 2006 - Brigada de Incêndio PDFDocument37 pagesNBR 14276 - 2006 - Brigada de Incêndio PDFMarco Antonio HoinskiNo ratings yet
- NBR 13714 - 2000 - Sistemas de Hidrantes e de Mangotinhos para Combate A IncêndioDocument25 pagesNBR 13714 - 2000 - Sistemas de Hidrantes e de Mangotinhos para Combate A IncêndioPablo Eduardo Junges Abreu67% (3)
- Tabelas para Dimensionamento de HidrantesDocument2 pagesTabelas para Dimensionamento de HidrantesHennerson A. SilvaNo ratings yet
- Características do som e saúde auditivaDocument3 pagesCaracterísticas do som e saúde auditivaciromoitinhoNo ratings yet
- Materiais para betão armado: deformações do betão e propriedades do açoDocument5 pagesMateriais para betão armado: deformações do betão e propriedades do açoFrancisco McclureNo ratings yet
- 2 - Caldeiras de VaporDocument37 pages2 - Caldeiras de VaporRaniel Gomes AlexandreNo ratings yet
- Avanços No Projeto e Operação de Precipitadores EletrostáticosDocument11 pagesAvanços No Projeto e Operação de Precipitadores EletrostáticosRafael NascimentoNo ratings yet
- Física Projéteis QuedaDocument1 pageFísica Projéteis QuedaPedro Teixeira0% (1)
- 02 Circuitos Elétricos de Corrente AlternadaDocument10 pages02 Circuitos Elétricos de Corrente Alternadaganjos610No ratings yet
- Ótica geométrica e formação de imagensDocument35 pagesÓtica geométrica e formação de imagensSergio CarvalhoNo ratings yet
- Coordenadas GeográficasDocument6 pagesCoordenadas GeográficasRodrigo LimaNo ratings yet
- Cinetica Lista 1Document3 pagesCinetica Lista 1luisparoNo ratings yet
- Software Tração Curva EscoamentoDocument9 pagesSoftware Tração Curva EscoamentoMarcos TortiniNo ratings yet
- Tarefa 2Document1 pageTarefa 2Valdenia Lorenzo0% (2)
- Câmara Escura e Clara Sala RXDocument6 pagesCâmara Escura e Clara Sala RXMairita Mandóra Dos Santos50% (4)
- Estudo da influência de fatores na velocidade de reaçõesDocument6 pagesEstudo da influência de fatores na velocidade de reaçõesEmérson RochaNo ratings yet
- Principais Defeitos em CaldeiraDocument2 pagesPrincipais Defeitos em CaldeiralcesarmcostaNo ratings yet
- Modelagem de Materiais Compósitos: Propriedades e AplicaçõesDocument53 pagesModelagem de Materiais Compósitos: Propriedades e AplicaçõesLuiz GustavoNo ratings yet
- Compressores: tipos, princípios e aplicaçõesDocument19 pagesCompressores: tipos, princípios e aplicaçõesLuis VilelaNo ratings yet
- 17.pdf LIBS GSRDocument8 pages17.pdf LIBS GSRClaudio NovaesNo ratings yet
- Op2 7 Lista-2017Document9 pagesOp2 7 Lista-2017Livia Garcia0% (1)
- Purificação Ácido AcetilsalicílicoDocument8 pagesPurificação Ácido AcetilsalicílicoHiel OliveiraNo ratings yet
- NBR 11854 - 1992 - Bastao Isolante para Trabalho em Redes Energizadas de DistribuicaoDocument14 pagesNBR 11854 - 1992 - Bastao Isolante para Trabalho em Redes Energizadas de DistribuicaoMurilo Rodrigues100% (1)
- Resistência Dos Materiais - IsEPDocument45 pagesResistência Dos Materiais - IsEPtiago_valenteNo ratings yet
- Material-da-Aula-Curso Intensivo de Física para E-Aula 17 - Termol-Livro-DigitalDocument120 pagesMaterial-da-Aula-Curso Intensivo de Física para E-Aula 17 - Termol-Livro-DigitalKleber SenaNo ratings yet
- Lista de Exercícios FluidosDocument4 pagesLista de Exercícios FluidosbrenaNo ratings yet
- Solidificação de metais: nucleação e crescimento de grãosDocument28 pagesSolidificação de metais: nucleação e crescimento de grãosManolo GipielaNo ratings yet
- Teoria de IncendiosDocument77 pagesTeoria de IncendiosLiudbomba BuxexolasNo ratings yet
- Questões sobre corrente elétrica e carga de elétronsDocument6 pagesQuestões sobre corrente elétrica e carga de elétronsenge2209No ratings yet
- Resumo Do Capítulo 18 Halliday - AlDocument13 pagesResumo Do Capítulo 18 Halliday - AlAlex OliveiraNo ratings yet
- Termodinâmica de gases: pressão, volume e temperaturaDocument12 pagesTermodinâmica de gases: pressão, volume e temperaturaRodrigo CostaNo ratings yet
- Climatologia Aplicada A Geografia PDFDocument331 pagesClimatologia Aplicada A Geografia PDFDGeo MartinsNo ratings yet
- Inventário de Máquinas e EquipamentosDocument49 pagesInventário de Máquinas e EquipamentosAntonio CarlosNo ratings yet